1 opendrive坐标系概况
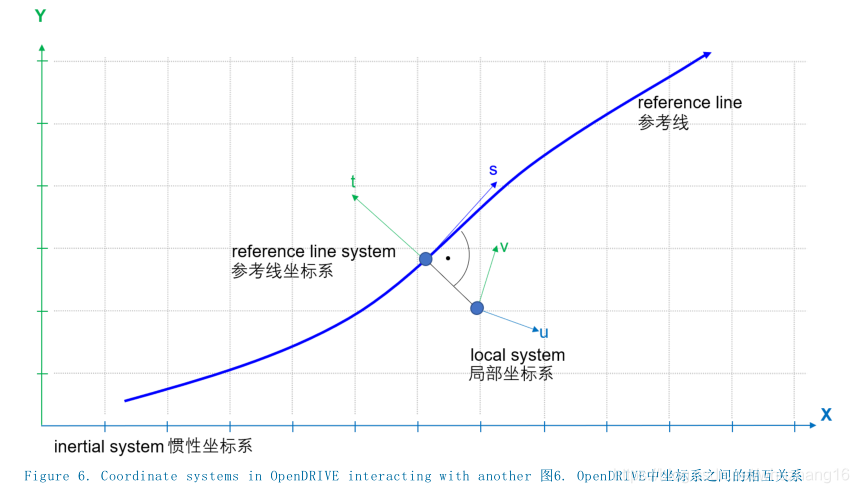
OpenDRIVE使用三种类型的坐标系,如下图所示:
- 惯性x/y/z轴坐标系
- 参考线s/t/h轴坐标系
- 局部u/v/z轴坐标系

若无另外说明,对局部坐标系的查找与定位将相对于参考线坐标系来进行。对参考线坐标系位置与方向的设定则相对于惯性坐标系来开展,具体方法为对原点、原点的航向角/偏航角、横摆角/翻滚角和俯仰角的旋转角度及它们之间的关系进行详细说明。
2 惯性坐标系(Inertial coordinate systems)
根据ISO 8855惯性坐标系是右手坐标系,其轴的指向方向如下(见图7):
- x轴 ⇒ 右方
- y轴 ⇒ 上方
- z轴 ⇒ 指向绘图平面外
以下惯例适用于地理参考:
- x轴 ⇒ 东边
- y轴 ⇒ 北边
- z轴 ⇒ 上方
通过依次设置航向角/偏航角(heading)、俯仰角(pitch)和横摆角/翻滚角(roll),元素(如物体、标志等)可被置于惯性坐标系中:
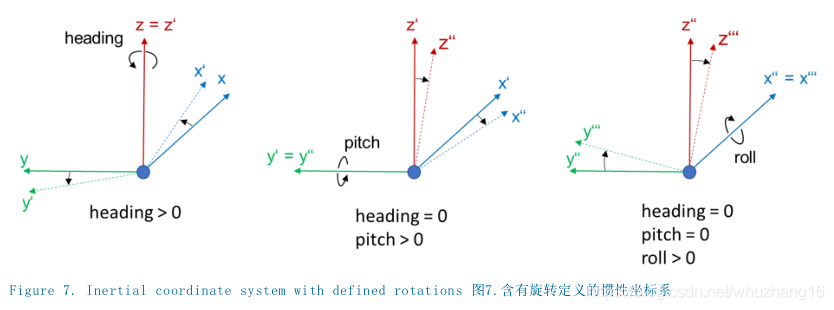
图7展示了对应角的正轴与正方向。



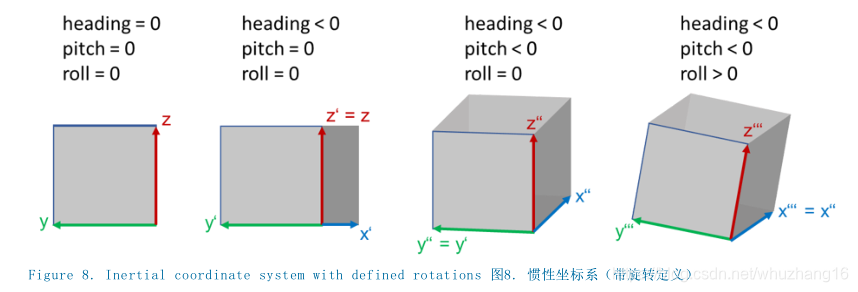
x’/y’/(z’=z) 指的是以航向角/偏航角围绕z轴旋转x/y/z轴之后的坐标系。坐标系x’’/(y’’=y’)/z’’指的是以俯仰角围绕y’轴旋转x’/y’/z’轴之后的坐标系。最后,坐标系(x’’’=x’’)/y’’’/z’’’在用横摆角/翻滚角旋转x’’/y’’/z’’后获得。
3 参考线坐标系
参考线坐标系同样也是右手坐标系,应用于道路参考线。s方向跟随着参考线的切线方向。这里需要说明的是:参考线总是被放置在由惯性坐标系定义的x/y平面里。t方向与s方向成正交。在定义完垂直于x轴和y轴、朝上的h方向后,整个右手坐标系才算完成。被定义的自由度如下:
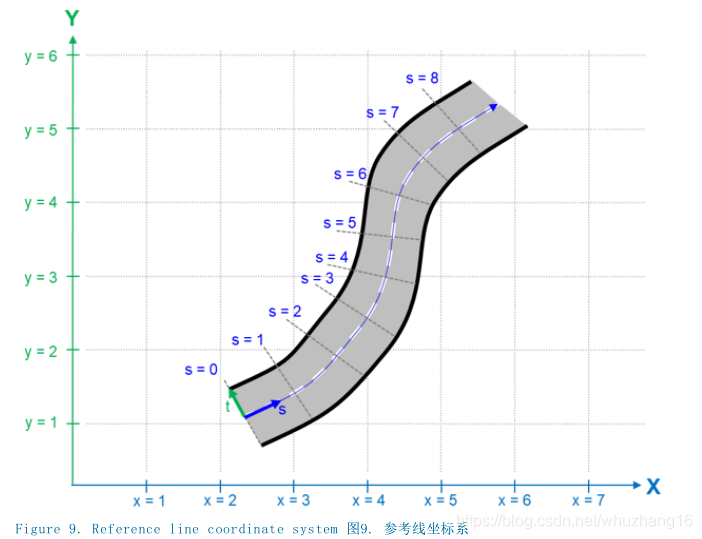
s :坐标沿参考线,以[m]为单位,由道路参考线的起点开始测量,在xy平面中计算(也就是说,这里不考虑道路的高程剖面);
t :侧面,在惯性x/y平面里正向向左;
h :在右手坐标系中垂直于st平面;



与惯性系相似,s’/t’/h’ 与s’’’/t’’’/h’’’指的是围绕航向角/偏航角和横摆角/翻滚角旋转后得到的坐标系。如图11所示,通过提供原点坐标以及相对于惯性坐标系原点的方向(航向角/偏航角),参考线坐标系可(can)被置于惯性空间中。
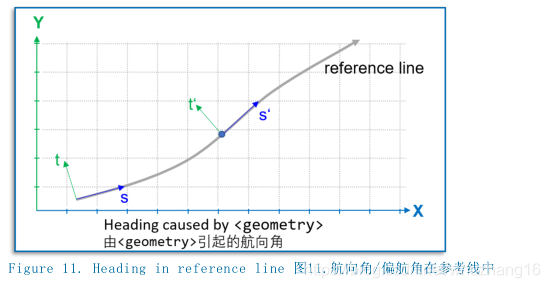
超高程导致参考线内产生横摆角/翻滚角。

俯仰角在s/t/h轴坐标系中不可能出现,参考线的高程如下图所示。高程对s的长度不产生影响。

4 局部坐标系
根据ISO 8855局部坐标系是右手坐标系,其轴的指向方向如下。以下内容适用于非旋转坐标系:
u :向前匹配 s
v :向左匹配 t
z :向上匹配 h
可通过依次设置航向角/偏航角、俯仰角和横摆角/翻滚角,将元素(例如物体)置于局部坐标系中:
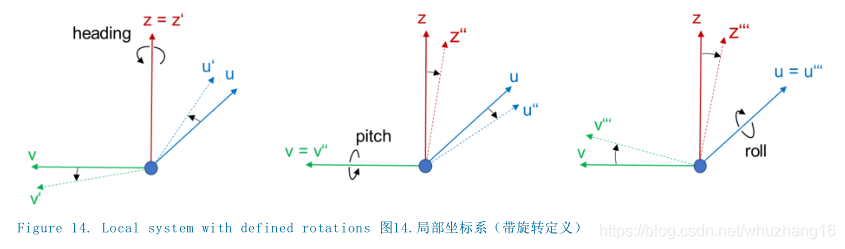
在局部坐标系中,以下角度得到定义:
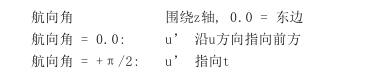

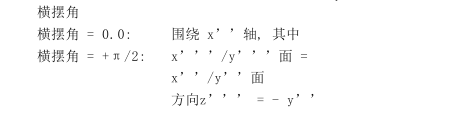

图14展示了对应角的正轴与正方向。局部坐标系只能(can)通过以下方法被置于参考线空间中:如图16所示,在参考线坐标系中提供局部坐标系的原点和相对于参考线坐标系、局部系原点的方向(航向角/偏航角)。

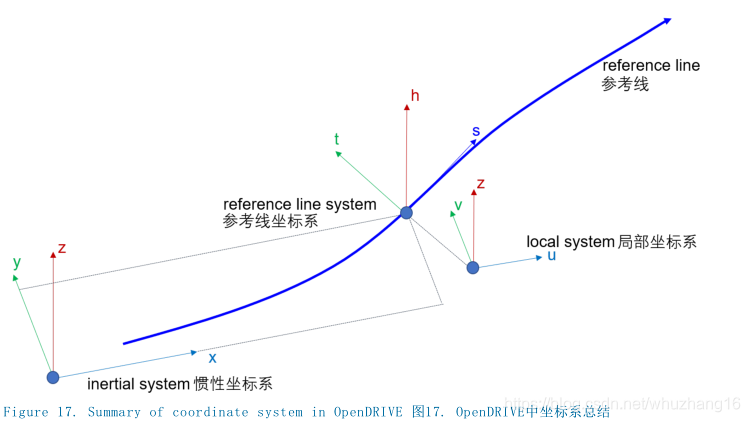
5 所有可用坐标系的总结
惯性坐标系、参考线坐标系和局部坐标系将在OpenDRIVE中同时被使用。图17中的示例描述了三个坐标系相对于彼此的位置与方向设定。
6 OpenDRIVE中的地理坐标参考
空间参考系的标准化由欧洲石油调查组织(EPSG)执行,该参考系由用于描述大地基准的参数来定义。大地基准是相对于地球的椭圆模型的位置合集所作的坐标参考系。
通过使用基于PROJ(一种用于两个坐标系之间数据交换的格式)的投影字符串来完成对大地基准的描述。该数据应标为CDATA,因为其可能包含会干预元素属性XML语义的字符。
在OpenDRIVE中,关于数据集的地理参考信息在<header>元素的<geoReference>元素中得以呈现。Proj字符串(如以下XML示例中所示)包含了所有定义已使用的空间参考系的参数:
关于proj字符串的细节信息,参见 https://proj.org/usage/projections.html
投影的定义不能(shall)多于一个。若定义缺失,那么则假定为局部笛卡尔坐标系。
这里强烈建议使用proj字符串的官方参数组(使用该链接查询字符串: https://epsg.io/ )。参数不应(should)被改变。一些空间参考系如UTM具有隐东及北伪偏移,这里使用+x_0与+y_0参数对它们进行定义。
若想应用偏移,请使用<offset>元素,而不是改变所有参数值。
XML示例:
<geoReference>
<![CDATA[+proj=utm +zone=32 +ellps=GRS80 +towgs84=0,0,0,0,0,0,0 +units=m +no_defs]]>
</geoReference>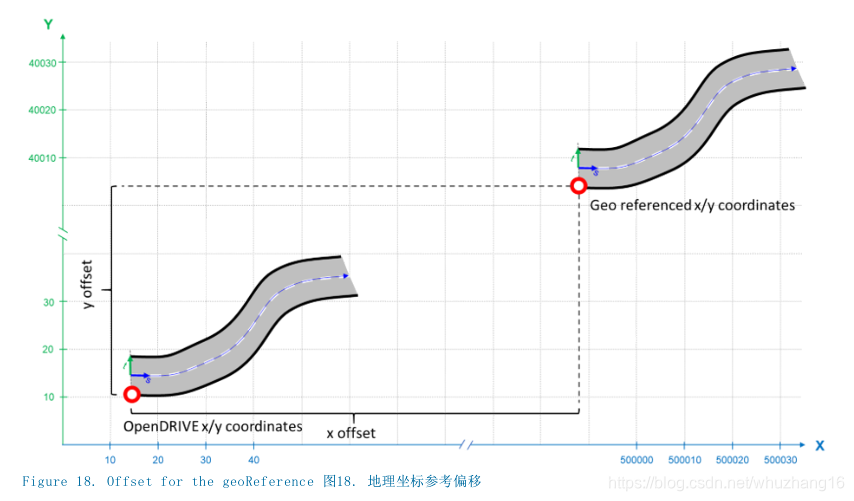
规则:
- <offset> 应使OpenDRIVE 的x和y坐标大致集中在(0;0)周围。在x和y坐标过大的情况下,由于IEEE 754双精度浮点数的精确度有限,在内部使用浮点坐标的应用可能无法对它们进行精确处理。