1.按块分析输入捕获的整个过程:
输入捕获的流程图:(仅以通道1为例)
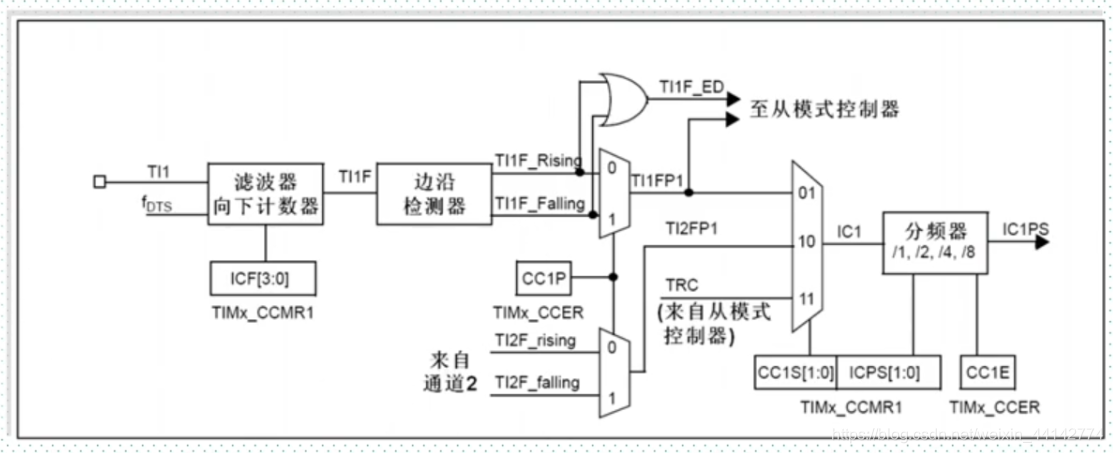
(1)设置滤波器:
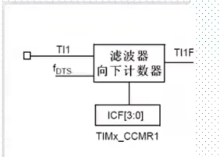
浅薄的理解:这一部分跟“去抖”有些相似
其中fDTS是根据内部时钟CK_INT设置的,这两个频率是为了去设置IC1F[3:0]这四位从而改变采样频率作准备的。
(假设我们是上升沿触发),例如设置这四位为0011,则采样频率f SAMPLING =f CK_INT ,N=8 。就是说以CK_INT 这个频率采集8次,如果八次都是高电平就会触发输入捕获。
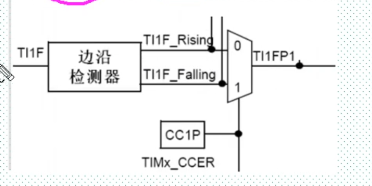
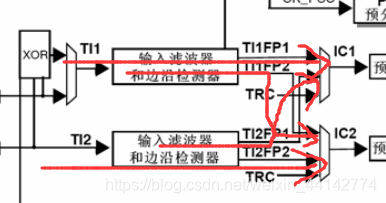
(2)设置捕获极性
(3)设置输入捕获映射通道
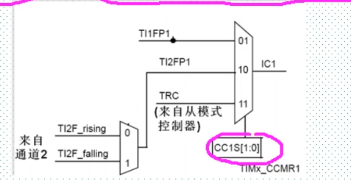
什么意思呢?如图所示:
(4)设置捕获分频器
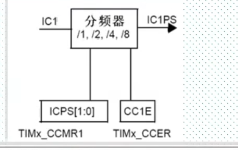
这就很好理解了,比如说我们上升沿捕获,我们可以通过设置分频系数控制每几个上升沿触发一次捕获。
2.输入捕获到底干了啥?

3.对计时器的寄存器的小总结:
(1)TIMx_CR1、TIMx_CNT、TIMx_PSC、TIMx_ARR:设置时基单元
(2)TIMx_CCMR1、TIMx_CCMR2:与四个通道的输入输出有关的配置
几个符号说明:
①CCx:Capture/Compare,设置比较器是用于捕获(输入)还是比较(输出)
②OCx:Output compare,输出比较
③ICx:Input capture,输入捕获
④CHx、TIx:都指的是映射的引脚,前者是输出状态地下的表示,后者是输入状态下的表示。
⑤ICxPS:输入捕获后经过分频后的信号
⑥OCxREF:输出的有效信号还未经过输出极性的设置
(3)TIMx_CCER: 捕获/ 比较使能寄存器,多用于配置四个通道的极性和使能输入或输出,
(4)TIMx_CCRx:四个通道的捕获比较寄存器:
输出时用作配置比较值,从而影响占空比
输入时用于触发输入捕获存储此时计数器的值
4.库函数的用途小总结:
void TIM_DeInit(TIM_TypeDef* TIMx);
用于复位,不用管。
void TIM_TimeBaseInit(TIM_TypeDef* TIMx, TIM_TimeBaseInitTypeDef* TIM_TimeBaseInitStruct);
只要使用计时器,时基单元肯定必须配置:选择时钟源,加载值和分频系数
void TIM_OC1Init(TIM_TypeDef* TIMx, TIM_OCInitTypeDef* TIM_OCInitStruct);
void TIM_OC2Init(TIM_TypeDef* TIMx, TIM_OCInitTypeDef* TIM_OCInitStruct);
void TIM_OC3Init(TIM_TypeDef* TIMx, TIM_OCInitTypeDef* TIM_OCInitStruct);
void TIM_OC4Init(TIM_TypeDef* TIMx, TIM_OCInitTypeDef* TIM_OCInitStruct);
上面这四个用于设置输出PWM时用到的参数,包括选择PWM输出模式,选择输出极性,设置比较值。注意:设置输出时是按输出通道分的库函数
void TIM_ICInit(TIM_TypeDef* TIMx, TIM_ICInitTypeDef* TIM_ICInitStruct);
这一个用于设置输入捕获的参数,就是最开始我们说的那几个。可以看出,配置输入时不是按输入通道分的库函数
void TIM_PWMIConfig(TIM_TypeDef* TIMx, TIM_ICInitTypeDef* TIM_ICInitStruct);
pwm输入模式?还没用过,http://www.manongjc.com/detail/16-wcqebecwsvnhuxo.html
void TIM_BDTRConfig(TIM_TypeDef* TIMx, TIM_BDTRInitTypeDef TIM_BDTRInitStruct);
void TIM_TimeBaseStructInit(TIM_TimeBaseInitTypeDef TIM_TimeBaseInitStruct);
这个函数将定时器时基单元初始化为默认值
void TIM_OCStructInit(TIM_OCInitTypeDef* TIM_OCInitStruct);
同理,这个函数将定时器输出初始化为默认值
void TIM_ICStructInit(TIM_ICInitTypeDef* TIM_ICInitStruct);
同理,这个函数将定时器输入初始化为默认值
void TIM_BDTRStructInit(TIM_BDTRInitTypeDef* TIM_BDTRInitStruct);
同理,这个函数将定时器互补输出(我猜的还没用)初始化为默认值
void TIM_Cmd(TIM_TypeDef* TIMx, FunctionalState NewState);
必用,定时器的使能
void TIM_CtrlPWMOutputs(TIM_TypeDef* TIMx, FunctionalState NewState);
还是跟高级定时器有关
void TIM_ITConfig(TIM_TypeDef* TIMx, uint16_t TIM_IT, FunctionalState NewState);
使能各种中断,包括更新中断,输入捕获中断等等
void TIM_GenerateEvent(TIM_TypeDef* TIMx, uint16_t TIM_EventSource);
用于软件产生事件
void TIM_DMAConfig(TIM_TypeDef* TIMx, uint16_t TIM_DMABase, uint16_t TIM_DMABurstLength);
没用,用到再补充
void TIM_DMACmd(TIM_TypeDef* TIMx, uint16_t TIM_DMASource, FunctionalState NewState);
没用,用到再补充
void TIM_InternalClockConfig(TIM_TypeDef* TIMx);
没用,用到再补充
void TIM_ITRxExternalClockConfig(TIM_TypeDef* TIMx, uint16_t TIM_InputTriggerSource);
没用,用到再补充
void TIM_TIxExternalClockConfig(TIM_TypeDef* TIMx, uint16_t TIM_TIxExternalCLKSource, uint16_t TIM_ICPolarity, uint16_t ICFilter);
void TIM_ETRClockMode1Config(TIM_TypeDef* TIMx, uint16_t TIM_ExtTRGPrescaler, uint16_t TIM_ExtTRGPolarity,
uint16_t ExtTRGFilter);
void TIM_ETRClockMode2Config(TIM_TypeDef* TIMx, uint16_t TIM_ExtTRGPrescaler,
uint16_t TIM_ExtTRGPolarity, uint16_t ExtTRGFilter);
void TIM_ETRConfig(TIM_TypeDef* TIMx, uint16_t TIM_ExtTRGPrescaler, uint16_t TIM_ExtTRGPolarity,
uint16_t ExtTRGFilter);
以上全根SMCR寄存器有关,没用,用到再补充
void TIM_PrescalerConfig(TIM_TypeDef* TIMx, uint16_t Prescaler, uint16_t TIM_PSCReloadMode);
单独设置定时器的预分频系数,软件置UG位将其写入
void TIM_CounterModeConfig(TIM_TypeDef* TIMx, uint16_t TIM_CounterMode);
单独设置定时器的计数模式:向上、向下或向上向下
void TIM_SelectInputTrigger(TIM_TypeDef* TIMx, uint16_t TIM_InputTriggerSource);
没用,用到再补充
void TIM_EncoderInterfaceConfig(TIM_TypeDef* TIMx, uint16_t TIM_EncoderMode,
uint16_t TIM_IC1Polarity, uint16_t TIM_IC2Polarity);
没用,用到再补充
void TIM_ForcedOC1Config(TIM_TypeDef* TIMx, uint16_t TIM_ForcedAction);
void TIM_ForcedOC2Config(TIM_TypeDef* TIMx, uint16_t TIM_ForcedAction);
void TIM_ForcedOC3Config(TIM_TypeDef* TIMx, uint16_t TIM_ForcedAction);
void TIM_ForcedOC4Config(TIM_TypeDef* TIMx, uint16_t TIM_ForcedAction);
以上四个单独用于设置输出参考信号OC1REF的动作,现在主要是选择PWM输出模式
void TIM_ARRPreloadConfig(TIM_TypeDef* TIMx, FunctionalState NewState);
设置自动装载的预加载
void TIM_SelectCOM(TIM_TypeDef* TIMx, FunctionalState NewState);
没用,用到再补充
void TIM_SelectCCDMA(TIM_TypeDef* TIMx, FunctionalState NewState);
没用,用到再补充
void TIM_CCPreloadControl(TIM_TypeDef* TIMx, FunctionalState NewState);
void TIM_OC1PreloadConfig(TIM_TypeDef* TIMx, uint16_t TIM_OCPreload);
void TIM_OC2PreloadConfig(TIM_TypeDef* TIMx, uint16_t TIM_OCPreload);
void TIM_OC3PreloadConfig(TIM_TypeDef* TIMx, uint16_t TIM_OCPreload);
void TIM_OC4PreloadConfig(TIM_TypeDef* TIMx, uint16_t TIM_OCPreload);
用于设置PWM输出比较值的预加载
void TIM_OC1FastConfig(TIM_TypeDef* TIMx, uint16_t TIM_OCFast);
void TIM_OC2FastConfig(TIM_TypeDef* TIMx, uint16_t TIM_OCFast);
void TIM_OC3FastConfig(TIM_TypeDef* TIMx, uint16_t TIM_OCFast);
void TIM_OC4FastConfig(TIM_TypeDef* TIMx, uint16_t TIM_OCFast);
输出比较快速使能
void TIM_ClearOC1Ref(TIM_TypeDef* TIMx, uint16_t TIM_OCClear);
void TIM_ClearOC2Ref(TIM_TypeDef* TIMx, uint16_t TIM_OCClear);
void TIM_ClearOC3Ref(TIM_TypeDef* TIMx, uint16_t TIM_OCClear);
void TIM_ClearOC4Ref(TIM_TypeDef* TIMx, uint16_t TIM_OCClear);
清除OC1REF=0
void TIM_OC1PolarityConfig(TIM_TypeDef* TIMx, uint16_t TIM_OCPolarity);
void TIM_OC1NPolarityConfig(TIM_TypeDef* TIMx, uint16_t TIM_OCNPolarity);
void TIM_OC2PolarityConfig(TIM_TypeDef* TIMx, uint16_t TIM_OCPolarity);
void TIM_OC2NPolarityConfig(TIM_TypeDef* TIMx, uint16_t TIM_OCNPolarity);
void TIM_OC3PolarityConfig(TIM_TypeDef* TIMx, uint16_t TIM_OCPolarity);
void TIM_OC3NPolarityConfig(TIM_TypeDef* TIMx, uint16_t TIM_OCNPolarity);
void TIM_OC4PolarityConfig(TIM_TypeDef* TIMx, uint16_t TIM_OCPolarity);
单独配置输入输出的极性,注意不光可以是输出的极性,也可以是输入的极性改变配置
void TIM_CCxCmd(TIM_TypeDef* TIMx, uint16_t TIM_Channel, uint16_t TIM_CCx);
void TIM_CCxNCmd(TIM_TypeDef* TIMx, uint16_t TIM_Channel, uint16_t TIM_CCxN);
void TIM_SelectOCxM(TIM_TypeDef* TIMx, uint16_t TIM_Channel, uint16_t TIM_OCMode);
void TIM_UpdateDisableConfig(TIM_TypeDef* TIMx, FunctionalState NewState);
禁止更新事件
void TIM_UpdateRequestConfig(TIM_TypeDef* TIMx, uint16_t TIM_UpdateSource);
软件通过该位选择UEV事件的源
void TIM_SelectHallSensor(TIM_TypeDef* TIMx, FunctionalState NewState);
void TIM_SelectOnePulseMode(TIM_TypeDef* TIMx, uint16_t TIM_OPMode);
设置单脉冲模式
void TIM_SelectOutputTrigger(TIM_TypeDef* TIMx, uint16_t TIM_TRGOSource);
void TIM_SelectSlaveMode(TIM_TypeDef* TIMx, uint16_t TIM_SlaveMode);
void TIM_SelectMasterSlaveMode(TIM_TypeDef* TIMx, uint16_t TIM_MasterSlaveMode);
void TIM_SetCounter(TIM_TypeDef* TIMx, uint16_t Counter);
单独设置计数器
void TIM_SetAutoreload(TIM_TypeDef* TIMx, uint16_t Autoreload);
单独设置装载值ARR
void TIM_SetCompare1(TIM_TypeDef* TIMx, uint16_t Compare1);
void TIM_SetCompare2(TIM_TypeDef* TIMx, uint16_t Compare2);
void TIM_SetCompare3(TIM_TypeDef* TIMx, uint16_t Compare3);
void TIM_SetCompare4(TIM_TypeDef* TIMx, uint16_t Compare4);
以上四个用于设置捕获比较寄存器的比较值,不只输出用奥,随便你想什么时候用都行
void TIM_SetIC1Prescaler(TIM_TypeDef* TIMx, uint16_t TIM_ICPSC);
void TIM_SetIC2Prescaler(TIM_TypeDef* TIMx, uint16_t TIM_ICPSC);
void TIM_SetIC3Prescaler(TIM_TypeDef* TIMx, uint16_t TIM_ICPSC);
void TIM_SetIC4Prescaler(TIM_TypeDef* TIMx, uint16_t TIM_ICPSC);
单独设置输入捕获的分频系数
void TIM_SetClockDivision(TIM_TypeDef* TIMx, uint16_t TIM_CKD);
用于设置输入捕获时的滤波器部分的fDTS频率
uint16_t TIM_GetCapture1(TIM_TypeDef* TIMx);
uint16_t TIM_GetCapture2(TIM_TypeDef* TIMx);
uint16_t TIM_GetCapture3(TIM_TypeDef* TIMx);
uint16_t TIM_GetCapture4(TIM_TypeDef* TIMx);
用于获得捕获比较寄存器里面的值,不只输入用奥,随便你想什么时候用都行
uint16_t TIM_GetCounter(TIM_TypeDef* TIMx);
获得此时计数器的值
uint16_t TIM_GetPrescaler(TIM_TypeDef* TIMx);
获得此时分频系数的值
FlagStatus TIM_GetFlagStatus(TIM_TypeDef* TIMx, uint16_t TIM_FLAG);
获得状态标志位
void TIM_ClearFlag(TIM_TypeDef* TIMx, uint16_t TIM_FLAG);
清除状态标志位
ITStatus TIM_GetITStatus(TIM_TypeDef* TIMx, uint16_t TIM_IT);
获得中断标志位
void TIM_ClearITPendingBit(TIM_TypeDef* TIMx, uint16_t TIM_IT);
获得中断标志位