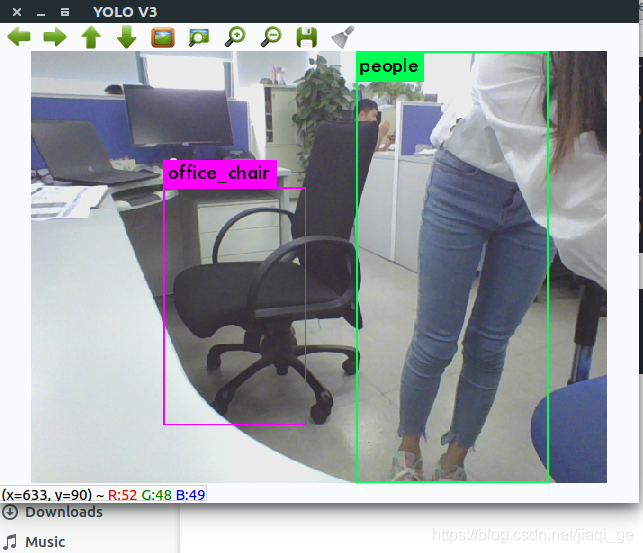
之前在基于yolov2完成了三类物体的训练:office_chair,high_chair,people
想着可以试着放到小车上跑了,但是硬件实在太差了,单目相机的像素实在太低,根本识别不出来,无奈我只能用自己的笔记本试验一下(换成kinect之后清楚了很多,但是目前还是小车没识别出来,我也不知道为啥,自己电脑也装的是同一个镜像)。
已经有很多人写好了Darknet_ros,可以拿过来直接用,改改就好。
我总结了一下,主要修改的地方如下:
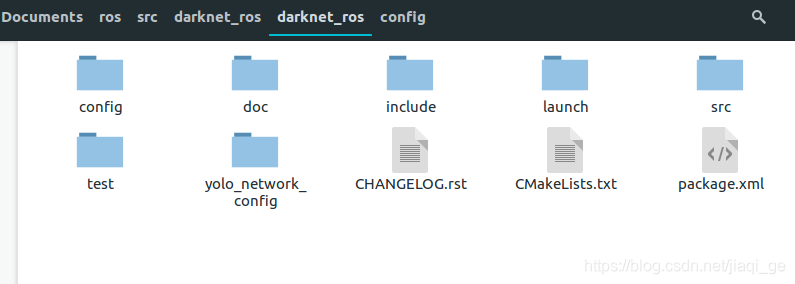
config中的ros.yaml,这个yolo_ros节点订阅了/camera/image话题作为输入(我改成了camera_node/image_raw),发布三个话题作为输出,分别是:
/darknet_ros/found_object 物体类别名称。
/darknet_ros/bounding_boxes 框信息。
/darknet_ros/detection_image 检测结果图片。

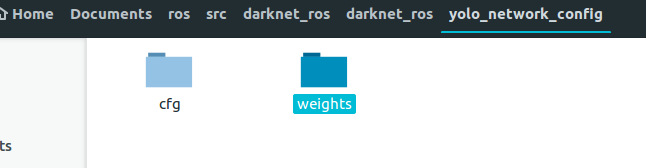
yolo_network_config中修改cfg和weights,cfg放自己训练的网络结构,weights可以用网上下载的权重,也可以用自己训练之后的权重,我用的是自己训练好的
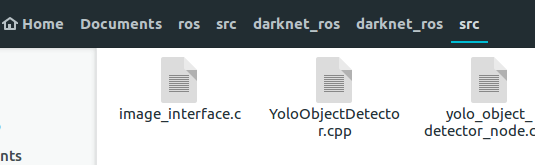
yoloobjectdetector.c文件要进行响应的修改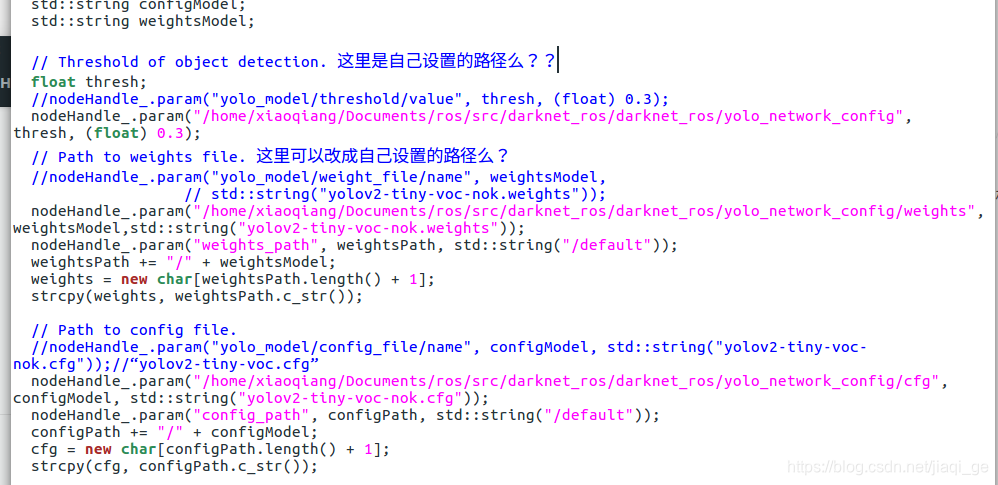
贴一下我参考过的几篇文章:
https://blog.csdn.net/mxdsdo09/article/details/86623642
https://blog.csdn.net/mxdsdo09/article/details/86623642
https://blog.csdn.net/weixin_40003920/article/details/79547000