因为我的USB-TTL模块出了问题,所以只好使用GPIO口和树莓派实现通信,在此记录。
本文采用树莓派的GPIO口实现UART通信功能。读者若想使用USB转TTL实现UART通信,参考文章: 通过UART实现和树莓派的上下位机串口通信
GPIO引脚功能图(4B)
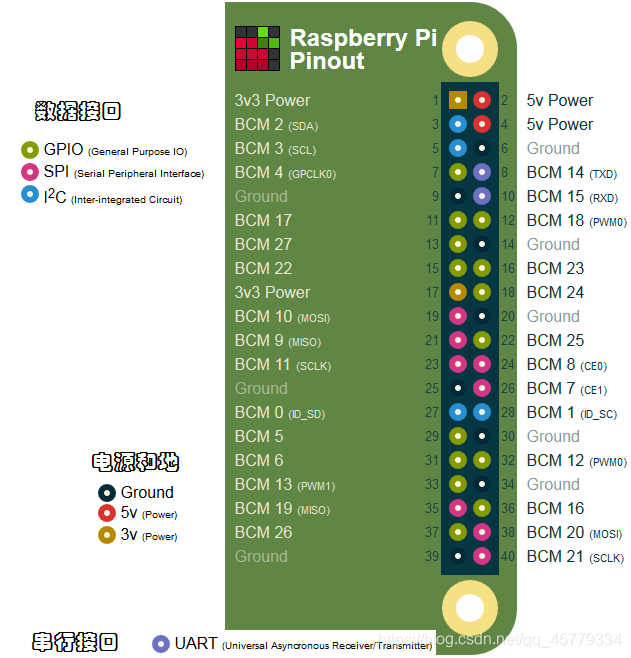
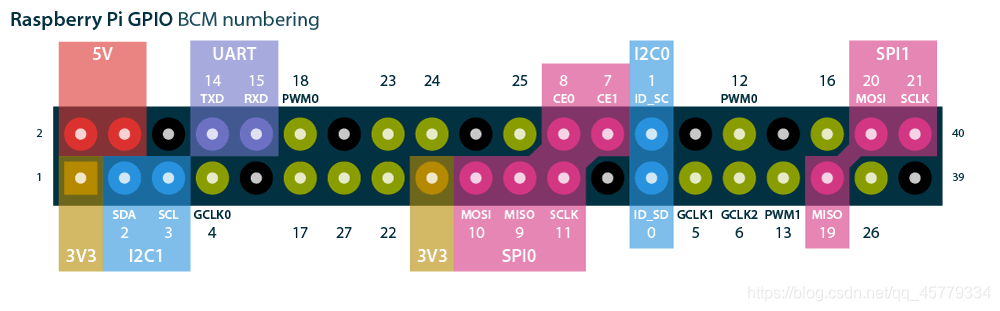
再具体一些:
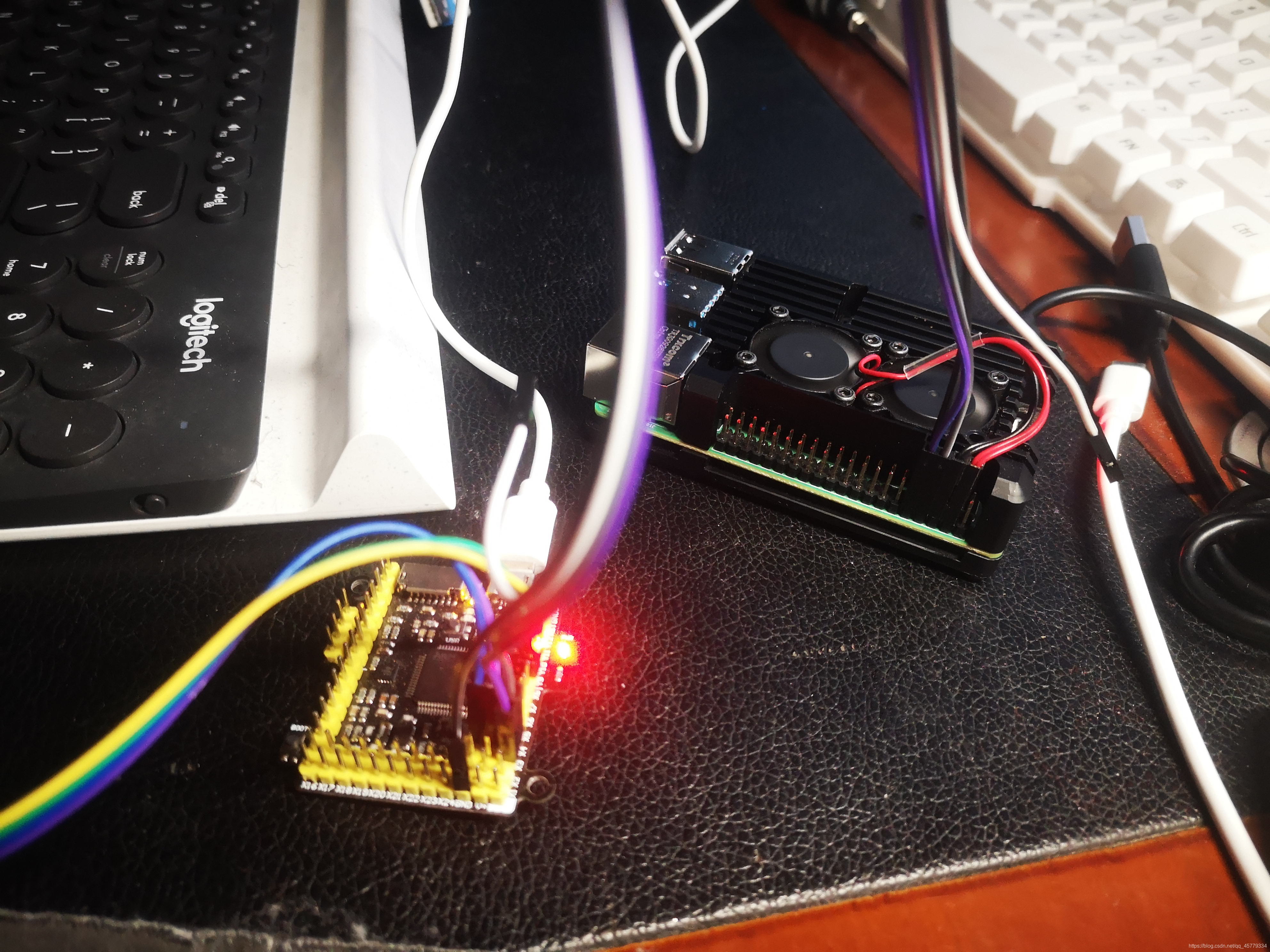
硬件连接
| PYB | 树莓派 |
|---|---|
| TX(X3) | RX(15) |
| RX(X4) | TX(14) |
| GND | GND |
UART通信代码
上位机树莓派端
# -*- coding:utf-8 -*-
import serial
import time
ser = serial.Serial("/dev/ttyAMA0", 9600)
ser.flushInput()
ser.write("begin".encode("utf-8"))
def main():
while True:
count = ser.inWaiting()
if count != 0:
recv = ser.read(count)
ser.write("Recv some data is : ".encode("utf-8"))
ser.write(recv)
ser.write("\n".encode("utf-8"))
print(ser.readline())
ser.flushInput()
if __name__ == '__main__':
main()
下位机PYB端
from pyb import UART
class Serial:
def __init__(self, uart):
self.uart = uart
def data_check(self):
return self.get_data()
def send_data(self):
data = "hi i'm pyboard!\n"
data.encode("utf-8")
self.uart.write(data)
# print("send!")
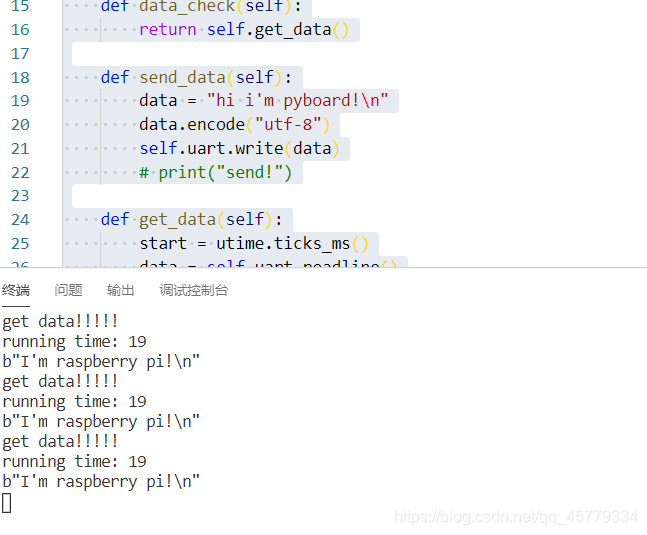
def get_data(self):
start = utime.ticks_ms()
data = self.uart.readline()
if data != None:
print("get data!!!!!")
try:
data.decode("utf-8")
except:
pass
end = utime.ticks_ms()
print("running time:", end - start)
print(data)
return True
else:
return False
uart = UART(2, 9600)
ser = serial.Serial(uart)
while True:
ser.send_data()
ser.get_data()
通信效果
树莓派端
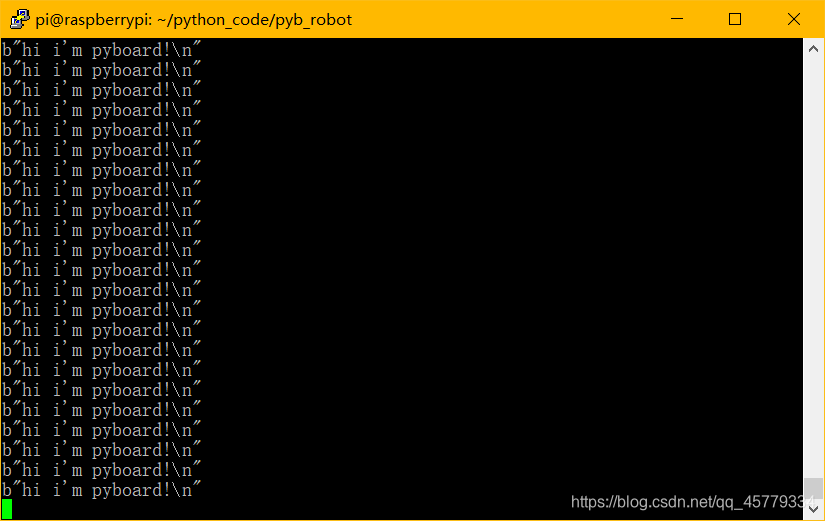
PYB端
通过程序计时得到:每次UART通信耗时19ms
不同波特率下的串口传输速率
尝试将树莓派和PYB端的UART波特率都调高至115200,重启后发现:每次串口通信耗时仅需2ms!

参考文章: