一、功能介绍
让人物脚贴合地面。
二、效果演示

三、原理
该脚本利用射线检测,判断前方障碍物高度,若脚能放上去(放上去的高度参数自己设置),则匹配高度。
四、实现步骤
先给人物添加 FullBodyBipedIK ,再添加GrounderFBBIK
(碰撞、运动条件等提前配置好)
GrounderFullBodyBiped 既是 FullBodyBipedIK

五、属相讲解
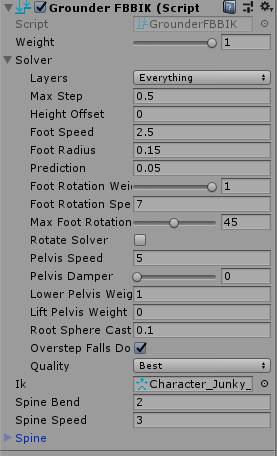
Solver:
Layers:检测障碍物的层级。
MaxStep:脚能抬到障碍物的最大高度(低于这个高度,脚往上抬。高于,则不抬)。
HeightOffset:脚抬到障碍物上后,再向上偏移的距离。
FootSpeed:脚到达障碍物上方的速度。
FootRadius:脚的碰撞检测大小。该脚本是利用该圆球碰撞器发射射线,检测障碍物。
Prediction:脚跨越的效果。值低的话会有穿模效果,高则没有。

FootRotationWeight:脚在斜面上时旋转偏移权重。
FootRotationSpeed:脚适配到那个斜面时的速度。
MaxFootRotation:在斜面时最大旋转角度。
RotateSolver:人物在斜面走的能力。(原先我们仅在地面走,现在是游戏中人物在墙上走,脚贴合斜面)

PelvisSpeed:盆骨上下位移的速度。因为当脚移动时,盆骨也会跟着上下移动。
PelvisDamper:盆骨位移缓冲值,上下移动会柔和。
RootSphereCast:脚射线检测的距离。若项目中检测不到前方障碍物,可设置的大一点。
Quality:设置 GrounderFBBIK 的质量
Spine:设置脚运动,对身体其他部位的影响,使运动看起来更自然。
