一、简介
1.1 蚁群算法是对自然界蚂蚁的寻径方式进行模似而得出的一种仿生算法:蚂蚁在运动过程中,能够在它所经过的路径上留下信息素(pheromone)的物质进行信息传递,而且蚂蚁在运动过程中能够感知这种物质,并以此指导自己的运动方向。由大量蚂蚁组成的蚁群集体行为便表现出一种信息正反馈现象:某一路径上走过的蚂蚁越多,则后来者选择该路径的概率就越大。蚁群算法具有分布计算、信息正反馈和启发式搜索的特征,本质上是进化算法中的一种启发式全局优化算法。
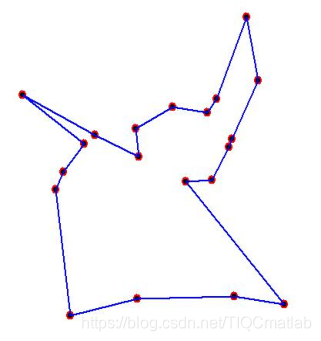
1.2 TSP问题(旅行商问题)
T S P 问 题 可 以 用 一 个 带 权 完 全 图G=(N,A)来表示,其中N是带有n=|N|点(城市)的集合,A是完全连接这些点的边的集合。每一条边(i,j)属于A都带有一个权值,它代表城市i与城市j之间的距离。TSP问题就是要找到图中的最短哈密尔顿回路。
1、构建图:构建图与问题描述图是一致的,成份的集合C对应着点的集合(即:C=N),连接对应着边的集合(即L=A),且每一条边都带有一个权值,代表点i和j之间的距离。
2、约束条件:所有城市都要被访问且每个城市最多只能被访问一次。
3、信息素和启发式信息:TSP 问题中的信息素表示在访问城市i后直接访问城市j的期望度。启发式信息值一般与城市i和城市j的距离成反比。
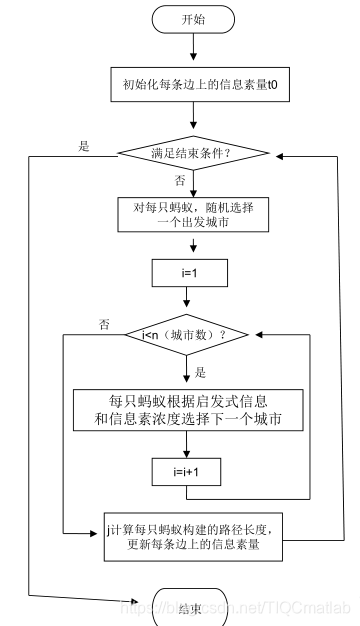
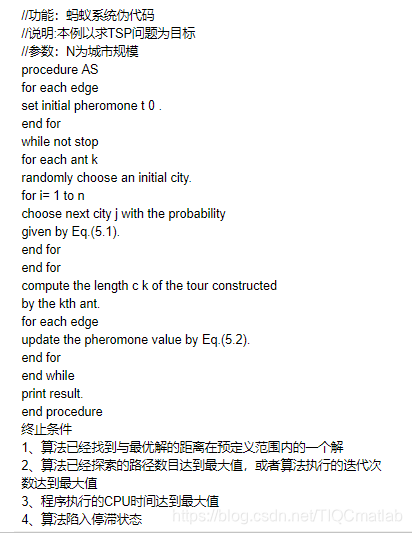
4、解的构建:每只蚂蚁最初都从随机选择出来的城市出发,每经过一次迭代蚂蚁就向解中添加一个还没有访问过的城市。当所有城市都被蚂蚁访问过之后,解的构建就终止。1.3实现流程及伪代码
二、源代码
function varargout = AntColonyVRPGUI(varargin)
% ANTCOLONYVRPGUI M-file for AntColonyVRPGUI.fig
% ANTCOLONYVRPGUI, by itself, creates a new ANTCOLONYVRPGUI or raises the existing
% singleton*.
%
% H = ANTCOLONYVRPGUI returns the handle to a new ANTCOLONYVRPGUI or the handle to
% the existing singleton*.
%
% ANTCOLONYVRPGUI('CALLBACK',hObject,eventData,handles,...) calls the local
% function named CALLBACK in ANTCOLONYVRPGUI.M with the given input arguments.
%
% ANTCOLONYVRPGUI('Property','Value',...) creates a new ANTCOLONYVRPGUI or raises the
% existing singleton*. Starting from the left, property value pairs are
% applied to the GUI before AntColonyVRPGUI_OpeningFcn gets called. An
% unrecognized property name or invalid value makes property application
% stop. All inputs are passed to AntColonyVRPGUI_OpeningFcn via varargin.
%
% *See GUI Options on GUIDE's Tools menu. Choose "GUI allows only one
% instance to run (singleton)".
%
% See also: GUIDE, GUIDATA, GUIHANDLES
% Edit the above text to modify the response to help AntColonyVRPGUI
% Last Modified by GUIDE v2.5 11-Jun-2015 00:13:48
% Begin initialization code - DO NOT EDIT
gui_Singleton = 1;
gui_State = struct('gui_Name', mfilename, ...
'gui_Singleton', gui_Singleton, ...
'gui_OpeningFcn', @AntColonyVRPGUI_OpeningFcn, ...
'gui_OutputFcn', @AntColonyVRPGUI_OutputFcn, ...
'gui_LayoutFcn', [] , ...
'gui_Callback', []);
if nargin && ischar(varargin{
1})
gui_State.gui_Callback = str2func(varargin{
1});
end
if nargout
[varargout{
1:nargout}] = gui_mainfcn(gui_State, varargin{
:});
else
gui_mainfcn(gui_State, varargin{
:});
end
% End initialization code - DO NOT EDIT
% --- Executes just before AntColonyVRPGUI is made visible.
function AntColonyVRPGUI_OpeningFcn(hObject, eventdata, handles, varargin)
% This function has no output args, see OutputFcn.
% hObject handle to figure
% eventdata reserved - to be defined in a future version of MATLAB
% handles structure with handles and user data (see GUIDATA)
% varargin command line arguments to AntColonyVRPGUI (see VARARGIN)
% Choose default command line output for AntColonyVRPGUI
handles.output = hObject;
%% change !!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!
handles.ismdvrp = true; %!!!
%%
if handles.ismdvrp == true
[handles.initClusters, handles.coordinates] = INIT;
handles.clusters = handles.initClusters;
set(handles.uipanelBases,'Visible','on');
create_init_plot_MDVRP(handles.coordinates, handles.clusters);
else
%initialization
[vehicles,demands,dist_stations,dist_bases] = INIT_VRP;
handles.vehicles = vehicles;
handles.demands = demands;
handles.distances_stations = dist_stations;
handles.distances_bases = dist_bases;
set(handles.uipanelBases,'Visible','off');
end
% Update handles structure
guidata(hObject, handles);
% UIWAIT makes AntColonyVRPGUI wait for user response (see UIRESUME)
% uiwait(handles.figure1);
% --- Outputs from this function are returned to the command line.
function varargout = AntColonyVRPGUI_OutputFcn(hObject, eventdata, handles)
% varargout cell array for returning output args (see VARARGOUT);
% hObject handle to figure
% eventdata reserved - to be defined in a future version of MATLAB
% handles structure with handles and user data (see GUIDATA)
% Get default command line output from handles structure
varargout{
1} = handles.output;
% --- Executes on selection change in algorithmPopupmenu.
function algorithmPopupmenu_Callback(hObject, eventdata, handles)
% hObject handle to algorithmPopupmenu (see GCBO)
% eventdata reserved - to be defined in a future version of MATLAB
% handles structure with handles and user data (see GUIDATA)
% Hints: contents = cellstr(get(hObject,'String')) returns algorithmPopupmenu contents as cell array
% contents{
get(hObject,'Value')} returns selected item from algorithmPopupmenu
%set invisible error messages
set(handles.errorMandatoryEditFields,'Visible','off');
%erase text in edit fields
set(handles.evaporationPheromoneEdit,'String','');
set(handles.attractStationEdit,'String','');
set(handles.increasePheromoneEdit,'String','');
set(handles.amountPheromoneEdit,'String','');
set(handles.eliteAntsEdit,'String','');
%set disabled all edit fields
set(handles.evaporationPheromoneEdit,'Enable','off');
set(handles.attractStationEdit,'Enable','off');
set(handles.increasePheromoneEdit,'Enable','off');
set(handles.amountPheromoneEdit,'Enable','off');
set(handles.eliteAntsEdit,'Enable','off');
%set disabled run button
set(handles.runButton,'Enable','off');
%set to 0 all results
set(handles.lengthWayText,'String','-');
set(handles.subroutesNText,'String','-');
set(handles.timeSpentText,'String','-');
if handles.ismdvrp == true
%set invisible bases' listbox
set(handles.listboxBases,'Visible','off');
set(handles.totalLengthText,'Visible','off');
set(handles.totalLengthText,'String','-');
set(handles.totalLengthLabel,'Visible','off');
%clear plot
cla;
create_init_plot_MDVRP(handles.coordinates, handles.clusters);
end
%clear plot
%cla;
%clear legend
legend('off');
val = get(hObject,'Value');
if val ~= 1 %not placeholder's text (not be executed)
if val ~= 2 %not Clark-Wright algorithm
%enable edit fields
if val == 5 %AntAlg with elite ants
set(handles.eliteAntsEdit,'Enable','on');
end
set(handles.evaporationPheromoneEdit,'Enable','on');
set(handles.attractStationEdit,'Enable','on');
set(handles.increasePheromoneEdit,'Enable','on');
set(handles.amountPheromoneEdit,'Enable','on');
end
%enable run button
set(handles.runButton,'Enable','on');
end
% --- Executes during object creation, after setting all properties.
function algorithmPopupmenu_CreateFcn(hObject, eventdata, handles)
% hObject handle to algorithmPopupmenu (see GCBO)
% eventdata reserved - to be defined in a future version of MATLAB
% handles empty - handles not created until after all CreateFcns called
% Hint: popupmenu controls usually have a white background on Windows.
% See ISPC and COMPUTER.
if ispc && isequal(get(hObject,'BackgroundColor'), get(0,'defaultUicontrolBackgroundColor'))
set(hObject,'BackgroundColor','white');
end
function evaporationPheromoneEdit_Callback(hObject, eventdata, handles)
% hObject handle to evaporationPheromoneEdit (see GCBO)
% eventdata reserved - to be defined in a future version of MATLAB
% handles structure with handles and user data (see GUIDATA)
% Hints: get(hObject,'String') returns contents of evaporationPheromoneEdit as text
% str2double(get(hObject,'String')) returns contents of evaporationPheromoneEdit as a double
% --- Executes during object creation, after setting all properties.
function evaporationPheromoneEdit_CreateFcn(hObject, eventdata, handles)
% hObject handle to evaporationPheromoneEdit (see GCBO)
% eventdata reserved - to be defined in a future version of MATLAB
% handles empty - handles not created until after all CreateFcns called
% Hint: edit controls usually have a white background on Windows.
% See ISPC and COMPUTER.
if ispc && isequal(get(hObject,'BackgroundColor'), get(0,'defaultUicontrolBackgroundColor'))
set(hObject,'BackgroundColor','white');
end
function attractStationEdit_Callback(hObject, eventdata, handles)
% hObject handle to attractStationEdit (see GCBO)
% eventdata reserved - to be defined in a future version of MATLAB
% handles structure with handles and user data (see GUIDATA)
% Hints: get(hObject,'String') returns contents of attractStationEdit as text
% str2double(get(hObject,'String')) returns contents of attractStationEdit as a double
% --- Executes during object creation, after setting all properties.
function attractStationEdit_CreateFcn(hObject, eventdata, handles)
% hObject handle to attractStationEdit (see GCBO)
% eventdata reserved - to be defined in a future version of MATLAB
% handles empty - handles not created until after all CreateFcns called
% Hint: edit controls usually have a white background on Windows.
% See ISPC and COMPUTER.
if ispc && isequal(get(hObject,'BackgroundColor'), get(0,'defaultUicontrolBackgroundColor'))
set(hObject,'BackgroundColor','white');
end
function increasePheromoneEdit_Callback(hObject, eventdata, handles)
% hObject handle to increasePheromoneEdit (see GCBO)
% eventdata reserved - to be defined in a future version of MATLAB
% handles structure with handles and user data (see GUIDATA)
% Hints: get(hObject,'String') returns contents of increasePheromoneEdit as text
% str2double(get(hObject,'String')) returns contents of increasePheromoneEdit as a double
% --- Executes during object creation, after setting all properties.
function increasePheromoneEdit_CreateFcn(hObject, eventdata, handles)
% hObject handle to increasePheromoneEdit (see GCBO)
% eventdata reserved - to be defined in a future version of MATLAB
% handles empty - handles not created until after all CreateFcns called
% Hint: edit controls usually have a white background on Windows.
% See ISPC and COMPUTER.
if ispc && isequal(get(hObject,'BackgroundColor'), get(0,'defaultUicontrolBackgroundColor'))
set(hObject,'BackgroundColor','white');
end
function amountPheromoneEdit_Callback(hObject, eventdata, handles)
% hObject handle to amountPheromoneEdit (see GCBO)
% eventdata reserved - to be defined in a future version of MATLAB
% handles structure with handles and user data (see GUIDATA)
% Hints: get(hObject,'String') returns contents of amountPheromoneEdit as text
% str2double(get(hObject,'String')) returns contents of amountPheromoneEdit as a double
% --- Executes during object creation, after setting all properties.
function amountPheromoneEdit_CreateFcn(hObject, eventdata, handles)
% hObject handle to amountPheromoneEdit (see GCBO)
% eventdata reserved - to be defined in a future version of MATLAB
% handles empty - handles not created until after all CreateFcns called
% Hint: edit controls usually have a white background on Windows.
% See ISPC and COMPUTER.
if ispc && isequal(get(hObject,'BackgroundColor'), get(0,'defaultUicontrolBackgroundColor'))
set(hObject,'BackgroundColor','white');
end
function eliteAntsEdit_Callback(hObject, eventdata, handles)
% hObject handle to eliteAntsEdit (see GCBO)
% eventdata reserved - to be defined in a future version of MATLAB
% handles structure with handles and user data (see GUIDATA)
% Hints: get(hObject,'String') returns contents of eliteAntsEdit as text
% str2double(get(hObject,'String')) returns contents of eliteAntsEdit as a double
% --- Executes during object creation, after setting all properties.
function eliteAntsEdit_CreateFcn(hObject, eventdata, handles)
% hObject handle to eliteAntsEdit (see GCBO)
% eventdata reserved - to be defined in a future version of MATLAB
% handles empty - handles not created until after all CreateFcns called
% Hint: edit controls usually have a white background on Windows.
% See ISPC and COMPUTER.
if ispc && isequal(get(hObject,'BackgroundColor'), get(0,'defaultUicontrolBackgroundColor'))
set(hObject,'BackgroundColor','white');
end
% --- Executes on button press in runButton.
function runButton_Callback(hObject, eventdata, handles)
% hObject handle to runButton (see GCBO)
% eventdata reserved - to be defined in a future version of MATLAB
% handles structure with handles and user data (see GUIDATA)
%clear legend
legend('off');
%clear plot
%cla;
%set invisible error messages
set(handles.errorMandatoryEditFields,'Visible','off');
indexAlg = get(handles.algorithmPopupmenu,'Value');
if indexAlg ~= 1 %not placeholder's text (not be executed)
if indexAlg ~= 2 %not Clark-Wright algorithm
if indexAlg == 5 %AntAlg with elite ants
if isempty(get(handles.eliteAntsEdit,'String'))
set(handles.errorMandatoryEditFields,'Visible','on');
return;
end
end
if ( isempty(get(handles.evaporationPheromoneEdit,'String')) || ...
isempty(get(handles.attractStationEdit,'String')) || ...
isempty(get(handles.increasePheromoneEdit,'String')) || ...
isempty(get(handles.amountPheromoneEdit,'String')) )
set(handles.errorMandatoryEditFields,'Visible','on');
return;
end
end
%set disabled run button
set(handles.runButton,'Enable','off');
if handles.ismdvrp == true
clusters = runAlgorithmMDVRP(indexAlg, handles);
handles.clusters = clusters;
listbox=findall(gcf,'tag','listboxBases');
guidata(listbox,handles);
%select first value in bases' listbox
set(handles.listboxBases,'Value',1);
listboxBases_Callback(listbox, eventdata, handles);
else
runAlgorithmVRP(indexAlg, handles);
end
%set enabled run button
set(handles.runButton,'Enable','on');
%set enabled zoom tools
set(handles.toolZoomIn,'Enable','on');
set(handles.toolZoomOut,'Enable','on');
%set enabled pan tool
set(handles.toolPan,'Enable','on');
zoom reset;
end
function [clusters] = runAlgorithmMDVRP(index, handles)
if index ~= 1
if index ~= 2
e = str2double(get(handles.evaporationPheromoneEdit,'String'));
alpha = str2double(get(handles.attractStationEdit,'String'));
beta = str2double(get(handles.increasePheromoneEdit,'String'));
tau0 = str2double(get(handles.amountPheromoneEdit,'String'));
E = str2double(get(handles.eliteAntsEdit,'String'));
end
try
tStart = tic; %start spent time
clusters = handles.initClusters;
handles.clusters = clusters;
basesName = cell(1,length(clusters)+1);
basesName{
1} = 'Full view';
for c = 1:length(clusters)
switch index
case 2 %Clark-Wright
[ Route, RouteLength, vehicles ] = Clark_Wright_VRP( ...
clusters(c).demands, clusters(c).diststations, ...
clusters(c).distbases, clusters(c).vehicles_capacity );
case 3 %Ant-minpath
[Route, RouteLength, vehicles] = ANT_colony_algorithm_VRP_minpath( ...
clusters(c).diststations, clusters(c).distbases, ...
clusters(c).demands, [e alpha beta tau0], clusters(c).vehicles_capacity );
case 4 %Ant-partition
[Route, RouteLength, vehicles] = ANT_colony_algorithm_VRP( ...
clusters(c).diststations, clusters(c).distbases, ...
clusters(c).demands, [e alpha beta tau0], clusters(c).vehicles_capacity );
case 5 %Ant-elite ants
[Route, RouteLength, vehicles] = ANT_colony_algorithm_VRP_with_elite_ants( ...
clusters(c).diststations, clusters(c).distbases, ...
clusters(c).demands, [e alpha beta tau0 E], clusters(c).vehicles_capacity );
end
handles.clusters(c).mdvrp = changeStations(clusters, vehicles, RouteLength, Route, c);
basesName{
c + 1} = sprintf('Base #%d',c); %saving bases that need to be added to listbox
end
tElapsed = toc(tStart); %end spent time
catch ME
msgbox(strcat('Error occured: ',ME.message),'Error','error');
end
clusters = handles.clusters;
%clear plot
cla;
create_plot_route_with_vehicles_MDVRP(handles.coordinates, handles.clusters);
set(handles.timeSpentText,'String',sprintf('%fs',tElapsed));
set(handles.listboxBases, 'String', basesName);
set(handles.listboxBases, 'Visible','on');
set(handles.totalLengthText,'String',num2str(getTotalLength(handles.clusters)));
set(handles.totalLengthText,'Visible','on');
set(handles.totalLengthLabel,'Visible','on');
end
function [mdvrp] = changeStations(clusters, vehicles, LR, R, clusterN)
mdvrp = struct('length_route',[],'vehicles',[],'simpleVehicles',[],'num_of_subroutes',[]);
len = length(vehicles);
mdvrp.simpleVehicles = vehicles;
for v = 1:len
vehicles(v).route(vehicles(v).route == 1) = 0;
len_route = length(vehicles(v).route);
for vr = 1:len_route
if vehicles(v).route(vr) ~= 0 %羼腓 礤 徉玎
vehicles(v).route(vr) = clusters(clusterN).stations(vehicles(v).route(vr)-1);
end
end
end
mdvrp.num_of_subroutes = number_of_subroutes(R);
mdvrp.length_route = LR;
mdvrp.vehicles = vehicles;
function [tlength] = getTotalLength(clusters)
tlength = 0;
clen = length(clusters);
for c = 1:clen
tlength = tlength + clusters(c).mdvrp.length_route;
end
function runAlgorithmVRP(index, handles)
if index ~= 1
if index ~= 2
e = str2double(get(handles.evaporationPheromoneEdit,'String'));
alpha = str2double(get(handles.attractStationEdit,'String'));
beta = str2double(get(handles.increasePheromoneEdit,'String'));
tau0 = str2double(get(handles.amountPheromoneEdit,'String'));
E = str2double(get(handles.eliteAntsEdit,'String'));
end
try
tStart = tic; %start spent time
switch index
case 2 %Clark-Wright
[Route,RouteLength,vehicles] = Clark_Wright_VRP( handles.demands, ...
handles.distances_stations, handles.distances_bases, handles.vehicles );
case 3 %Ant-minpath
[Route,RouteLength,vehicles] = ANT_colony_algorithm_VRP_minpath( handles.distances_stations,...
handles.distances_bases, handles.demands, [e alpha beta tau0], handles.vehicles);
case 4 %Ant-partition
[Route,RouteLength,vehicles] = ANT_colony_algorithm_VRP( handles.distances_stations, ...
handles.distances_bases, handles.demands, [e alpha beta tau0], handles.vehicles);
case 5 %Ant-elite ants
[Route,RouteLength,vehicles] = ANT_colony_algorithm_VRP_with_elite_ants( ...
handles.distances_stations, handles.distances_bases, handles.demands, ...
[e alpha beta tau0 E], handles.vehicles);
end
tElapsed = toc(tStart); %end spent time
create_plot_route_with_vehicles( add_bases_to_distances(handles.distances_stations, ...
handles.distances_bases), vehicles, [0 handles.demands] );
catch ME
msgbox(strcat('Error occured: ',ME.message),'Error','error');
end
set(handles.lengthWayText,'String',num2str(RouteLength));
set(handles.subroutesNText,'String',num2str(number_of_subroutes(Route)));
set(handles.timeSpentText,'String',sprintf('%fs',tElapsed));
end
% --------------------------------------------------------------------
function dataTooltip_ClickedCallback(hObject, eventdata, handles)
% hObject handle to dataTooltip (see GCBO)
% eventdata reserved - to be defined in a future version of MATLAB
% handles structure with handles and user data (see GUIDATA)
% --------------------------------------------------------------------
function algorithmTooltip_ClickedCallback(hObject, eventdata, handles)
% hObject handle to algorithmTooltip (see GCBO)
% eventdata reserved - to be defined in a future version of MATLAB
% handles structure with handles and user data (see GUIDATA)
% --- Executes on selection change in listboxBases.
function listboxBases_Callback(hObject, eventdata, handles)
% hObject handle to listboxBases (see GCBO)
% eventdata reserved - to be defined in a future version of MATLAB
% handles structure with handles and user data (see GUIDATA)
% Hints: contents = cellstr(get(hObject,'String')) returns listboxBases contents as cell array
% contents{
get(hObject,'Value')} returns selected item from listboxBases
%clear legend
legend('off');
%clear plot
cla;
index = get(handles.listboxBases,'value') - 1;
if index == 0 %if user want to see the full graph of routes
create_plot_route_with_vehicles_MDVRP(handles.coordinates, handles.clusters);
set(handles.lengthWayText,'String','-');
set(handles.subroutesNText,'String','-');
else
create_plot_of_base_MDVRP(handles.coordinates, handles.clusters, index);
set(handles.lengthWayText,'String',num2str(handles.clusters(index).mdvrp.length_route));
set(handles.subroutesNText,'String',num2str(handles.clusters(index).mdvrp.num_of_subroutes));
end
% --- Executes during object creation, after setting all properties.
function listboxBases_CreateFcn(hObject, eventdata, handles)
% hObject handle to listboxBases (see GCBO)
% eventdata reserved - to be defined in a future version of MATLAB
% handles empty - handles not created until after all CreateFcns called
% Hint: listbox controls usually have a white background on Windows.
% See ISPC and COMPUTER.
if ispc && isequal(get(hObject,'BackgroundColor'), get(0,'defaultUicontrolBackgroundColor'))
set(hObject,'BackgroundColor','white');
end
% --------------------------------------------------------------------
function aboutMenu_Callback(hObject, eventdata, handles)
% hObject handle to aboutMenu (see GCBO)
% eventdata reserved - to be defined in a future version of MATLAB
% handles structure with handles and user data (see GUIDATA)
About %call gui About.m
% --------------------------------------------------------------------
function fileMenu_Callback(hObject, eventdata, handles)
% hObject handle to fileMenu (see GCBO)
% eventdata reserved - to be defined in a future version of MATLAB
% handles structure with handles and user data (see GUIDATA)
% --------------------------------------------------------------------
function anotherVRPSubmenu_Callback(hObject, eventdata, handles)
% hObject handle to anotherVRPSubmenu (see GCBO)
% eventdata reserved - to be defined in a future version of MATLAB
% handles structure with handles and user data (see GUIDATA)
% --------------------------------------------------------------------
function newDataSubmenu_Callback(hObject, eventdata, handles)
% hObject handle to newDataSubmenu (see GCBO)
% eventdata reserved - to be defined in a future version of MATLAB
% handles structure with handles and user data (see GUIDATA)
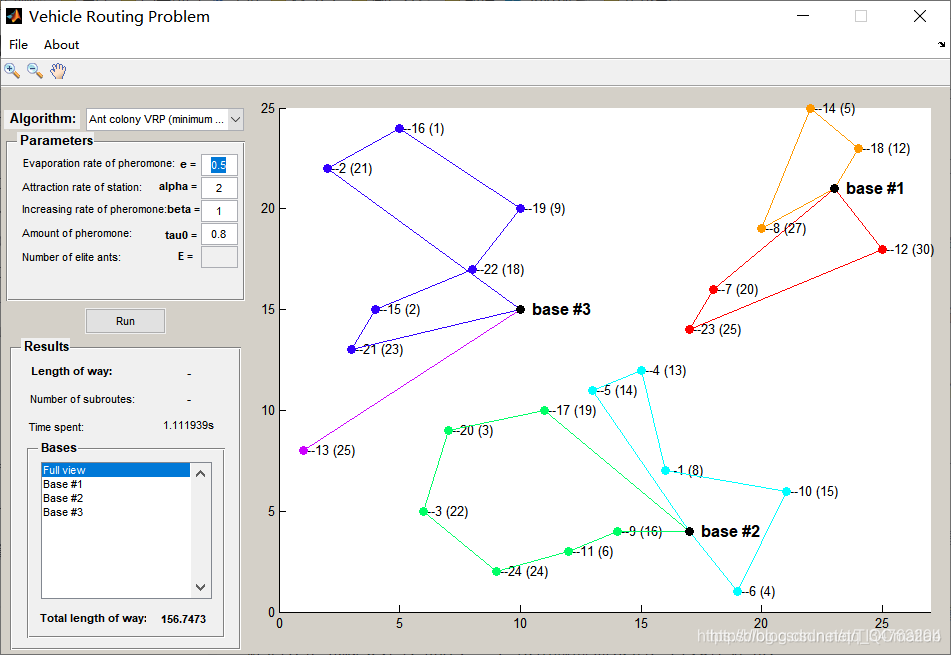
三、运行结果
四、备注
完整代码或者代写添加QQ912100926。
往期回顾>>>>>>
【路径规划】粒子群优化算法之三维无人机路径规划【Matlab 012期】
【路径规划】遗传算法之多物流中心的开放式车辆路径规划【Matlab 013期】
【路径规划】粒子群算法之机器人栅格路径规划【Matlab 014期】
【路径规划】蚁群算法之求解最短路径【Matlab 015期】
【路径规划】免疫算法之物流中心选址【Matlab 016期】
【路径规划】人工蜂群之无人机三维路径规划【Matlab 017期】
【路径规划】遗传算法之基于栅格地图机器人路径规划【Matlab 018期】
【路径规划】蚁群算法之多无人机攻击调度【Matlab 019期】
【路径规划】遗传算法之基于栅格地图的机器人最优路径规划【Matlab 020期】
【路径规划】遗传算法之考虑分配次序的多无人机协同目标分配建模【Matlab 021期】
【路径规划】蚁群算法之多中心vrp问题【Matlab 022期】
【路径规划】蚁群算法之求解带时间窗的多中心VRP【Matlab 023期】
【路径规划】遗传算法之多中心VRP求解【Matlab 024期】
【路径规划】模拟退火之求解VRP问题【Matlab 025期】
【路径规划】A星之栅格路径规划【Matlab 026期】
【路径规划】基于一种带交叉因子的双向寻优粒子群栅格地图路径规划【Matlab 027期】
【路径规划】【TSP】蚁群算法之求解TSP问题含GUI【Matlab 028期】
【路径规划】蚁群算法之栅格地图路径规划【Matlab 029期】
【路径规划】遗传算法之旅行商 TSP 【Matlab 030期】
【路径规划】模拟退火算法之旅行商 TSP 问题【Matlab 031期】
【路径规划】蚁群算法之智能车路径规划【Matlab 032期】
【路径规划】华为杯:基于matlab 无人机优化运用于抢险救灾【Matlab 033期】
【路径规划】matlab之最小费用最大流算问题【Matlab 034期】
【路径规划】A*算法之解决三维路径规划问题【Matlab 035期】
【路径规划】人工蜂群算法之路径规划【Matlab036期】
【路径规划】人工蜂群算法之路径规划【Matlab 037期】