一、简介
蚁群算法,也是优化算法当中的一种。蚁群算法擅长解决组合优化问题。蚁群算法能够有效的解决著名的旅行商问题(TSP),不止如此,在其他的一些领域也取得了一定的成效,例如工序排序问题,图着色问题,网络路由问题等等。接下来便为大家简单介绍蚁群算法的基本思想。
蚁群算法,顾名思义就是根据蚁群觅食行为而得来的一种算法。单只蚂蚁的觅食行为貌似是杂乱无章的,但是据昆虫学家观察,蚁群在觅食时总能够找到离食物最近的路线,这其中的原因是什么呢?其实,蚂蚁的视力并不是很好,但是他们又是凭借什么区寻找到距离食物的最短路径的呢?经过研究发现,每一只蚂蚁在觅食的过程中,会在沿途释放出一种叫做信息素的物质。其他蚂蚁会察觉到这种物质,因此,这种物质会影响到其他蚂蚁的觅食行为。当一些路径上经过的蚂蚁越多时,这条路径上的信息素浓度也就越高,其他蚂蚁选择这条路径的可能性也就越大,从而更增加了这条路径上的信息素浓度。当然,一条路径上的信息素浓度也会随着时间的流逝而降低。这种选择过程被称之为蚂蚁的自催化行为,是一种正反馈机制,也可以将整个蚁群认定为一个增强型学习系统。
为了让大家更好的理解上文中提到的蚁群觅食行为,这里通过一张图片来说明蚁群觅食行为。
如图所示,A点为一个蚁穴,设定其中有两只蚂蚁,蚂蚁1和蚂蚁2。B点为食物所在位置,C点只是路径上的一点。假设ABC形成一个等边三角形,且两只蚂蚁的移动速度均相同。
在t0时刻,两只蚂蚁在蚁穴中,在他们面前有两条路可以选择,即AB或AC。两只蚂蚁随机进行选择,我们假设蚂蚁1选择了路径AC,而蚂蚁2选择了路径AB。
在t1时刻是,蚂蚁1走到了C点,而蚂蚁2走到了B点,即食物所在位置。他们在其经过的路径上释放了信息素,在途中用虚线表示。之后蚂蚁2将食物运往蚁穴,并依然在沿途释放信息素,蚂蚁1则从C点向B点进发。
等到t2时刻时,蚂蚁2到达了蚁穴A点,蚂蚁1到达了食物所在位置B点,此时蚂蚁2再次出发去搬运食物,它发现AB路径上的信息素浓度要高于AC路径上的信息素浓度(AB路径上有两条虚线,AC路径上只有1条虚线)。因此蚂蚁2选择AB路径去搬运食物,而蚂蚁1则在B点获取到了食物,接下来返回蚁穴,但是它也有两种选择,一种是原路返回,另一种便是走线路AB。蚂蚁1发现AB路径上的信息素浓度要高于AC路径上的信息素浓度,因此它将选择AB来返回蚁穴。
如此往复,AC路径的信息素浓度会越来越低,AB路径上的信息素浓度会越来越高,所以AC路径上将没有蚂蚁再次经过,两只蚂蚁都只会选择路径较短的AB线路去搬运食物。
二、源代码
%% 清空环境
clc;clear
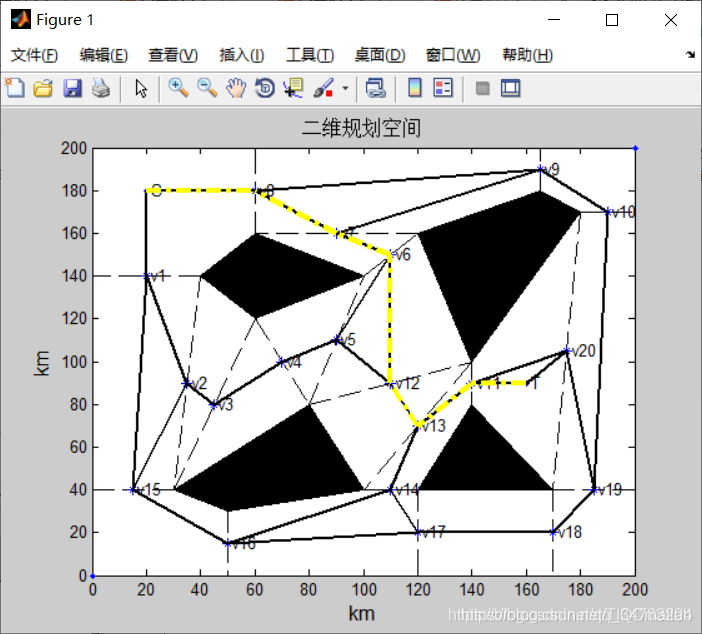
%% 障碍物数据
position = load('barrier.txt');
plot([0,200],[0,200],'.');
hold on
B = load('barrier.txt');
xlabel('km','fontsize',12)
ylabel('km','fontsize',12)
title('二维规划空间','fontsize',12)
%% 描述起点和终点
S = [20,180];
T = [160,90];
plot([S(1),T(1)],[S(2),T(2)],'.');
% 图形标注
text(S(1)+2,S(2),'S');
text(T(1)+2,T(2),'T');
%% 描绘障碍物图形
fill(position(1:4,1),position(1:4,2),[0,0,0]);
fill(position(5:8,1),position(5:8,2),[0,0,0]);
fill(position(9:12,1),position(9:12,2),[0,0,0]);
fill(position(13:15,1),position(13:15,2),[0,0,0]);
% 下载链路端点数据
L = load('lines.txt');
%% 描绘线及中点
v = zeros(size(L));
for i=1:20
plot([position(L(i,1),1),position(L(i,2),1)],[position(L(i,1),2)...
,position(L(i,2),2)],'color','black','LineStyle','--');
v(i,:) = (position(L(i,1),:)+position(L(i,2),:))/2;
plot(v(i,1),v(i,2),'*');
text(v(i,1)+2,v(i,2),strcat('v',num2str(i)));
end
%% 描绘可行路径
sign = load('matrix.txt');
[n,m]=size(sign);
for i=1:n
if i == 1
for k=1:m-1
if sign(i,k) == 1
plot([S(1),v(k-1,1)],[S(2),v(k-1,2)],'color',...
'black','Linewidth',2,'LineStyle','-');
end
end
continue;
end
for j=2:i
if i == m
if sign(i,j) == 1
plot([T(1),v(j-1,1)],[T(2),v(j-1,2)],'color',...
'black','Linewidth',2,'LineStyle','-');
end
else
if sign(i,j) == 1
plot([v(i-1,1),v(j-1,1)],[v(i-1,2),v(j-1,2)],...
'color','black','Linewidth',2,'LineStyle','-');
end
end
end
end
path = DijkstraPlan(position,sign);
j = path(22);
plot([T(1),v(j-1,1)],[T(2),v(j-1,2)],'color','yellow','LineWidth',3,'LineStyle','-.');
i = path(22);
j = path(i);
count = 0;
while true
plot([v(i-1,1),v(j-1,1)],[v(i-1,2),v(j-1,2)],'color','yellow','LineWidth',3,'LineStyle','-.');
count = count + 1;
i = j;
j = path(i);
if i == 1 || j==1
break;
end
end
plot([S(1),v(i-1,1)],[S(2),v(i-1,2)],'color','yellow','LineWidth',3,'LineStyle','-.');
count = count+3;
pathtemp(count) = 22;
j = 22;
for i=2:count
pathtemp(count-i+1) = path(j);
j = path(j);
end
path = pathtemp;
path = [1 9 8 7 13 14 12 22];
%% 蚁群算法参数初始化
pathCount = length(path)-2; %经过线段数量
pheCacuPara=2; %信息素计算参数
pheThres = 0.8; %信息素选择阈值
pheUpPara=[0.1 0.0003]; %信息素更新参数
qfz= zeros(pathCount,10); %启发值
phePara = ones(pathCount,10)*pheUpPara(2); %信息素
qfzPara1 = ones(10,1)*0.5; %启发信息参数
qfzPara2 = 1.1; %启发信息参数
m=10; %种群数量
NC=500; %循环次数
pathk = zeros(pathCount,m); %搜索结果记录
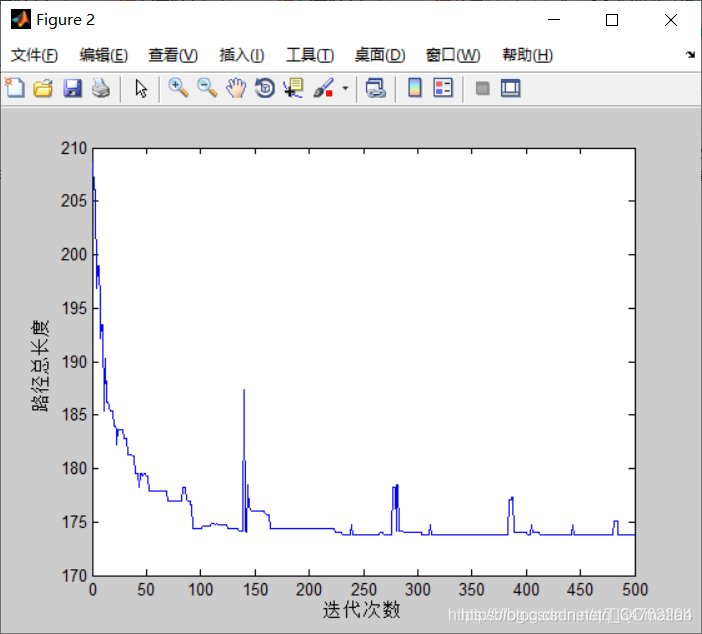
shortestpath = zeros(1,NC); %进化过程记录
%% 初始最短路径
dijpathlen = 0;
vv = zeros(22,2);
vv(1,:) = S;
vv(22,:) = T;
vv(2:21,:) = v;
for i=1:pathCount-1
dijpathlen = dijpathlen + sqrt((vv(path(i),1)-vv(path(i+1),1))^2+(vv(path(i),2)-vv(path(i+1),2))^2);
end
LL = dijpathlen;
figure;
plot(1:NC,shortestpath,'color','blue');
hold on
% plot(1:NC,dijpathlen,'color','red');
ylabel('路径总长度');
xlabel('迭代次数');
三、运行结果
四、备注
完整代码或者代写添加QQ912100926。
往期回顾>>>>>>
【路径规划】粒子群优化算法之三维无人机路径规划【Matlab 012期】
【路径规划】遗传算法之多物流中心的开放式车辆路径规划【Matlab 013期】
【路径规划】粒子群算法之机器人栅格路径规划【Matlab 014期】
【路径规划】蚁群算法之求解最短路径【Matlab 015期】
【路径规划】免疫算法之物流中心选址【Matlab 016期】
【路径规划】人工蜂群之无人机三维路径规划【Matlab 017期】
【路径规划】遗传算法之基于栅格地图机器人路径规划【Matlab 018期】
【路径规划】蚁群算法之多无人机攻击调度【Matlab 019期】
【路径规划】遗传算法之基于栅格地图的机器人最优路径规划【Matlab 020期】
【路径规划】遗传算法之考虑分配次序的多无人机协同目标分配建模【Matlab 021期】
【路径规划】蚁群算法之多中心vrp问题【Matlab 022期】
【路径规划】蚁群算法之求解带时间窗的多中心VRP【Matlab 023期】
【路径规划】遗传算法之多中心VRP求解【Matlab 024期】
【路径规划】模拟退火之求解VRP问题【Matlab 025期】
【路径规划】A星之栅格路径规划【Matlab 026期】
【路径规划】基于一种带交叉因子的双向寻优粒子群栅格地图路径规划【Matlab 027期】
【路径规划】【TSP】蚁群算法之求解TSP问题含GUI【Matlab 028期】
【路径规划】蚁群算法之栅格地图路径规划【Matlab 029期】
【路径规划】遗传算法之旅行商 TSP 【Matlab 030期】
【路径规划】模拟退火算法之旅行商 TSP 问题【Matlab 031期】
【路径规划】蚁群算法之智能车路径规划【Matlab 032期】
【路径规划】华为杯:基于matlab 无人机优化运用于抢险救灾【Matlab 033期】
【路径规划】matlab之最小费用最大流算问题【Matlab 034期】
【路径规划】A*算法之解决三维路径规划问题【Matlab 035期】
【路径规划】人工蜂群算法之路径规划【Matlab036期】
【路径规划】人工蜂群算法之路径规划【Matlab 037期】
【路径规划】蚁群算法之求解多旅行商MTSP问题【Matlab 038期】
【路径规划】蚁群算法之无人机路径规划【Matlab 039期】
[【路径规划】遗传算法之求解多VRP问题【Matlab 040期】](https://blog.csdn.net/m0_54742769/article/details/113091004
【VRP】遗传算法之带时间窗的车辆路径问题【Matlab 041期】