一、源代码
function varargout = AntColonyVRPGUI(varargin)
% ANTCOLONYVRPGUI M-file for AntColonyVRPGUI.fig
% ANTCOLONYVRPGUI, by itself, creates a new ANTCOLONYVRPGUI or raises the existing
% singleton*.
%
% H = ANTCOLONYVRPGUI returns the handle to a new ANTCOLONYVRPGUI or the handle to
% the existing singleton*.
%
% ANTCOLONYVRPGUI('CALLBACK',hObject,eventData,handles,...) calls the local
% function named CALLBACK in ANTCOLONYVRPGUI.M with the given input arguments.
%
% ANTCOLONYVRPGUI('Property','Value',...) creates a new ANTCOLONYVRPGUI or raises the
% existing singleton*. Starting from the left, property value pairs are
% applied to the GUI before AntColonyVRPGUI_OpeningFcn gets called. An
% unrecognized property name or invalid value makes property application
% stop. All inputs are passed to AntColonyVRPGUI_OpeningFcn via varargin.
%
% *See GUI Options on GUIDE's Tools menu. Choose "GUI allows only one
% instance to run (singleton)".
%
% See also: GUIDE, GUIDATA, GUIHANDLES
% Edit the above text to modify the response to help AntColonyVRPGUI
% Last Modified by GUIDE v2.5 11-Jun-2015 00:13:48
% Begin initialization code - DO NOT EDIT
gui_Singleton = 1;
gui_State = struct('gui_Name', mfilename, ...
'gui_Singleton', gui_Singleton, ...
'gui_OpeningFcn', @AntColonyVRPGUI_OpeningFcn, ...
'gui_OutputFcn', @AntColonyVRPGUI_OutputFcn, ...
'gui_LayoutFcn', [] , ...
'gui_Callback', []);
if nargin && ischar(varargin{
1})
gui_State.gui_Callback = str2func(varargin{
1});
end
if nargout
[varargout{
1:nargout}] = gui_mainfcn(gui_State, varargin{
:});
else
gui_mainfcn(gui_State, varargin{
:});
end
% End initialization code - DO NOT EDIT
% --- Executes just before AntColonyVRPGUI is made visible.
function AntColonyVRPGUI_OpeningFcn(hObject, eventdata, handles, varargin)
% This function has no output args, see OutputFcn.
% hObject handle to figure
% eventdata reserved - to be defined in a future version of MATLAB
% handles structure with handles and user data (see GUIDATA)
% varargin command line arguments to AntColonyVRPGUI (see VARARGIN)
% Choose default command line output for AntColonyVRPGUI
handles.output = hObject;
%% change !!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!
handles.ismdvrp = true; %!!!
%%
if handles.ismdvrp == true
[handles.initClusters, handles.coordinates] = INIT;
handles.clusters = handles.initClusters;
set(handles.uipanelBases,'Visible','on');
create_init_plot_MDVRP(handles.coordinates, handles.clusters);
else
%initialization
[vehicles,demands,dist_stations,dist_bases] = INIT_VRP;
handles.vehicles = vehicles;
handles.demands = demands;
handles.distances_stations = dist_stations;
handles.distances_bases = dist_bases;
set(handles.uipanelBases,'Visible','off');
end
% Update handles structure
guidata(hObject, handles);
% UIWAIT makes AntColonyVRPGUI wait for user response (see UIRESUME)
% uiwait(handles.figure1);
% --- Outputs from this function are returned to the command line.
function varargout = AntColonyVRPGUI_OutputFcn(hObject, eventdata, handles)
% varargout cell array for returning output args (see VARARGOUT);
% hObject handle to figure
% eventdata reserved - to be defined in a future version of MATLAB
% handles structure with handles and user data (see GUIDATA)
% Get default command line output from handles structure
varargout{
1} = handles.output;
% --- Executes on selection change in algorithmPopupmenu.
function algorithmPopupmenu_Callback(hObject, eventdata, handles)
% hObject handle to algorithmPopupmenu (see GCBO)
% eventdata reserved - to be defined in a future version of MATLAB
% handles structure with handles and user data (see GUIDATA)
% Hints: contents = cellstr(get(hObject,'String')) returns algorithmPopupmenu contents as cell array
% contents{
get(hObject,'Value')} returns selected item from algorithmPopupmenu
%set invisible error messages
set(handles.errorMandatoryEditFields,'Visible','off');
%erase text in edit fields
set(handles.evaporationPheromoneEdit,'String','');
set(handles.attractStationEdit,'String','');
set(handles.increasePheromoneEdit,'String','');
set(handles.amountPheromoneEdit,'String','');
set(handles.eliteAntsEdit,'String','');
%set disabled all edit fields
set(handles.evaporationPheromoneEdit,'Enable','off');
set(handles.attractStationEdit,'Enable','off');
set(handles.increasePheromoneEdit,'Enable','off');
set(handles.amountPheromoneEdit,'Enable','off');
set(handles.eliteAntsEdit,'Enable','off');
%set disabled run button
set(handles.runButton,'Enable','off');
%set to 0 all results
set(handles.lengthWayText,'String','-');
set(handles.subroutesNText,'String','-');
set(handles.timeSpentText,'String','-');
if handles.ismdvrp == true
%set invisible bases' listbox
set(handles.listboxBases,'Visible','off');
set(handles.totalLengthText,'Visible','off');
set(handles.totalLengthText,'String','-');
set(handles.totalLengthLabel,'Visible','off');
%clear plot
cla;
create_init_plot_MDVRP(handles.coordinates, handles.clusters);
end
%clear plot
%cla;
%clear legend
legend('off');
val = get(hObject,'Value');
if val ~= 1 %not placeholder's text (not be executed)
if val ~= 2 %not Clark-Wright algorithm
%enable edit fields
if val == 5 %AntAlg with elite ants
set(handles.eliteAntsEdit,'Enable','on');
end
set(handles.evaporationPheromoneEdit,'Enable','on');
set(handles.attractStationEdit,'Enable','on');
set(handles.increasePheromoneEdit,'Enable','on');
set(handles.amountPheromoneEdit,'Enable','on');
end
%enable run button
set(handles.runButton,'Enable','on');
end
% --- Executes during object creation, after setting all properties.
function algorithmPopupmenu_CreateFcn(hObject, eventdata, handles)
% hObject handle to algorithmPopupmenu (see GCBO)
% eventdata reserved - to be defined in a future version of MATLAB
% handles empty - handles not created until after all CreateFcns called
% Hint: popupmenu controls usually have a white background on Windows.
% See ISPC and COMPUTER.
if ispc && isequal(get(hObject,'BackgroundColor'), get(0,'defaultUicontrolBackgroundColor'))
set(hObject,'BackgroundColor','white');
end
function evaporationPheromoneEdit_Callback(hObject, eventdata, handles)
% hObject handle to evaporationPheromoneEdit (see GCBO)
% eventdata reserved - to be defined in a future version of MATLAB
% handles structure with handles and user data (see GUIDATA)
% Hints: get(hObject,'String') returns contents of evaporationPheromoneEdit as text
% str2double(get(hObject,'String')) returns contents of evaporationPheromoneEdit as a double
% --- Executes during object creation, after setting all properties.
function evaporationPheromoneEdit_CreateFcn(hObject, eventdata, handles)
% hObject handle to evaporationPheromoneEdit (see GCBO)
% eventdata reserved - to be defined in a future version of MATLAB
% handles empty - handles not created until after all CreateFcns called
% Hint: edit controls usually have a white background on Windows.
% See ISPC and COMPUTER.
if ispc && isequal(get(hObject,'BackgroundColor'), get(0,'defaultUicontrolBackgroundColor'))
set(hObject,'BackgroundColor','white');
end
function attractStationEdit_Callback(hObject, eventdata, handles)
% hObject handle to attractStationEdit (see GCBO)
% eventdata reserved - to be defined in a future version of MATLAB
% handles structure with handles and user data (see GUIDATA)
% Hints: get(hObject,'String') returns contents of attractStationEdit as text
% str2double(get(hObject,'String')) returns contents of attractStationEdit as a double
% --- Executes during object creation, after setting all properties.
function attractStationEdit_CreateFcn(hObject, eventdata, handles)
% hObject handle to attractStationEdit (see GCBO)
% eventdata reserved - to be defined in a future version of MATLAB
% handles empty - handles not created until after all CreateFcns called
% Hint: edit controls usually have a white background on Windows.
% See ISPC and COMPUTER.
if ispc && isequal(get(hObject,'BackgroundColor'), get(0,'defaultUicontrolBackgroundColor'))
set(hObject,'BackgroundColor','white');
end
function increasePheromoneEdit_Callback(hObject, eventdata, handles)
% hObject handle to increasePheromoneEdit (see GCBO)
% eventdata reserved - to be defined in a future version of MATLAB
% handles structure with handles and user data (see GUIDATA)
% Hints: get(hObject,'String') returns contents of increasePheromoneEdit as text
% str2double(get(hObject,'String')) returns contents of increasePheromoneEdit as a double
% --- Executes during object creation, after setting all properties.
function increasePheromoneEdit_CreateFcn(hObject, eventdata, handles)
% hObject handle to increasePheromoneEdit (see GCBO)
% eventdata reserved - to be defined in a future version of MATLAB
% handles empty - handles not created until after all CreateFcns called
% Hint: edit controls usually have a white background on Windows.
% See ISPC and COMPUTER.
if ispc && isequal(get(hObject,'BackgroundColor'), get(0,'defaultUicontrolBackgroundColor'))
set(hObject,'BackgroundColor','white');
end
function amountPheromoneEdit_Callback(hObject, eventdata, handles)
% hObject handle to amountPheromoneEdit (see GCBO)
% eventdata reserved - to be defined in a future version of MATLAB
% handles structure with handles and user data (see GUIDATA)
% Hints: get(hObject,'String') returns contents of amountPheromoneEdit as text
% str2double(get(hObject,'String')) returns contents of amountPheromoneEdit as a double
% --- Executes during object creation, after setting all properties.
function amountPheromoneEdit_CreateFcn(hObject, eventdata, handles)
% hObject handle to amountPheromoneEdit (see GCBO)
% eventdata reserved - to be defined in a future version of MATLAB
% handles empty - handles not created until after all CreateFcns called
% Hint: edit controls usually have a white background on Windows.
% See ISPC and COMPUTER.
if ispc && isequal(get(hObject,'BackgroundColor'), get(0,'defaultUicontrolBackgroundColor'))
set(hObject,'BackgroundColor','white');
end
function eliteAntsEdit_Callback(hObject, eventdata, handles)
% hObject handle to eliteAntsEdit (see GCBO)
% eventdata reserved - to be defined in a future version of MATLAB
% handles structure with handles and user data (see GUIDATA)
% Hints: get(hObject,'String') returns contents of eliteAntsEdit as text
% str2double(get(hObject,'String')) returns contents of eliteAntsEdit as a double
% --- Executes during object creation, after setting all properties.
function eliteAntsEdit_CreateFcn(hObject, eventdata, handles)
% hObject handle to eliteAntsEdit (see GCBO)
% eventdata reserved - to be defined in a future version of MATLAB
% handles empty - handles not created until after all CreateFcns called
% Hint: edit controls usually have a white background on Windows.
% See ISPC and COMPUTER.
if ispc && isequal(get(hObject,'BackgroundColor'), get(0,'defaultUicontrolBackgroundColor'))
set(hObject,'BackgroundColor','white');
end
% --- Executes on button press in runButton.
function runButton_Callback(hObject, eventdata, handles)
% hObject handle to runButton (see GCBO)
% eventdata reserved - to be defined in a future version of MATLAB
% handles structure with handles and user data (see GUIDATA)
%clear legend
legend('off');
%clear plot
%cla;
%set invisible error messages
set(handles.errorMandatoryEditFields,'Visible','off');
indexAlg = get(handles.algorithmPopupmenu,'Value');
if indexAlg ~= 1 %not placeholder's text (not be executed)
if indexAlg ~= 2 %not Clark-Wright algorithm
if indexAlg == 5 %AntAlg with elite ants
if isempty(get(handles.eliteAntsEdit,'String'))
set(handles.errorMandatoryEditFields,'Visible','on');
return;
end
end
if ( isempty(get(handles.evaporationPheromoneEdit,'String')) || ...
isempty(get(handles.attractStationEdit,'String')) || ...
isempty(get(handles.increasePheromoneEdit,'String')) || ...
isempty(get(handles.amountPheromoneEdit,'String')) )
set(handles.errorMandatoryEditFields,'Visible','on');
return;
end
end
%set disabled run button
set(handles.runButton,'Enable','off');
if handles.ismdvrp == true
clusters = runAlgorithmMDVRP(indexAlg, handles);
handles.clusters = clusters;
listbox=findall(gcf,'tag','listboxBases');
guidata(listbox,handles);
%select first value in bases' listbox
set(handles.listboxBases,'Value',1);
listboxBases_Callback(listbox, eventdata, handles);
else
runAlgorithmVRP(indexAlg, handles);
end
%set enabled run button
set(handles.runButton,'Enable','on');
%set enabled zoom tools
set(handles.toolZoomIn,'Enable','on');
set(handles.toolZoomOut,'Enable','on');
%set enabled pan tool
set(handles.toolPan,'Enable','on');
zoom reset;
end
function [clusters] = runAlgorithmMDVRP(index, handles)
if index ~= 1
if index ~= 2
e = str2double(get(handles.evaporationPheromoneEdit,'String'));
alpha = str2double(get(handles.attractStationEdit,'String'));
beta = str2double(get(handles.increasePheromoneEdit,'String'));
tau0 = str2double(get(handles.amountPheromoneEdit,'String'));
E = str2double(get(handles.eliteAntsEdit,'String'));
end
try
tStart = tic; %start spent time
clusters = handles.initClusters;
handles.clusters = clusters;
basesName = cell(1,length(clusters)+1);
basesName{
1} = 'Full view';
for c = 1:length(clusters)
switch index
case 2 %Clark-Wright
[ Route, RouteLength, vehicles ] = Clark_Wright_VRP( ...
clusters(c).demands, clusters(c).diststations, ...
clusters(c).distbases, clusters(c).vehicles_capacity );
case 3 %Ant-minpath
[Route, RouteLength, vehicles] = ANT_colony_algorithm_VRP_minpath( ...
clusters(c).diststations, clusters(c).distbases, ...
clusters(c).demands, [e alpha beta tau0], clusters(c).vehicles_capacity );
case 4 %Ant-partition
[Route, RouteLength, vehicles] = ANT_colony_algorithm_VRP( ...
clusters(c).diststations, clusters(c).distbases, ...
clusters(c).demands, [e alpha beta tau0], clusters(c).vehicles_capacity );
case 5 %Ant-elite ants
[Route, RouteLength, vehicles] = ANT_colony_algorithm_VRP_with_elite_ants( ...
clusters(c).diststations, clusters(c).distbases, ...
clusters(c).demands, [e alpha beta tau0 E], clusters(c).vehicles_capacity );
end
handles.clusters(c).mdvrp = changeStations(clusters, vehicles, RouteLength, Route, c);
basesName{
c + 1} = sprintf('Base #%d',c); %saving bases that need to be added to listbox
end
tElapsed = toc(tStart); %end spent time
catch ME
msgbox(strcat('Error occured: ',ME.message),'Error','error');
end
clusters = handles.clusters;
%clear plot
cla;
create_plot_route_with_vehicles_MDVRP(handles.coordinates, handles.clusters);
set(handles.timeSpentText,'String',sprintf('%fs',tElapsed));
set(handles.listboxBases, 'String', basesName);
set(handles.listboxBases, 'Visible','on');
set(handles.totalLengthText,'String',num2str(getTotalLength(handles.clusters)));
set(handles.totalLengthText,'Visible','on');
set(handles.totalLengthLabel,'Visible','on');
end
function [mdvrp] = changeStations(clusters, vehicles, LR, R, clusterN)
mdvrp = struct('length_route',[],'vehicles',[],'simpleVehicles',[],'num_of_subroutes',[]);
len = length(vehicles);
mdvrp.simpleVehicles = vehicles;
for v = 1:len
vehicles(v).route(vehicles(v).route == 1) = 0;
len_route = length(vehicles(v).route);
for vr = 1:len_route
if vehicles(v).route(vr) ~= 0 %羼腓 礤 徉玎
vehicles(v).route(vr) = clusters(clusterN).stations(vehicles(v).route(vr)-1);
end
end
end
mdvrp.num_of_subroutes = number_of_subroutes(R);
mdvrp.length_route = LR;
mdvrp.vehicles = vehicles;
function [tlength] = getTotalLength(clusters)
tlength = 0;
clen = length(clusters);
for c = 1:clen
tlength = tlength + clusters(c).mdvrp.length_route;
end
function runAlgorithmVRP(index, handles)
if index ~= 1
if index ~= 2
e = str2double(get(handles.evaporationPheromoneEdit,'String'));
alpha = str2double(get(handles.attractStationEdit,'String'));
beta = str2double(get(handles.increasePheromoneEdit,'String'));
tau0 = str2double(get(handles.amountPheromoneEdit,'String'));
E = str2double(get(handles.eliteAntsEdit,'String'));
end
try
tStart = tic; %start spent time
switch index
case 2 %Clark-Wright
[Route,RouteLength,vehicles] = Clark_Wright_VRP( handles.demands, ...
handles.distances_stations, handles.distances_bases, handles.vehicles );
case 3 %Ant-minpath
[Route,RouteLength,vehicles] = ANT_colony_algorithm_VRP_minpath( handles.distances_stations,...
handles.distances_bases, handles.demands, [e alpha beta tau0], handles.vehicles);
case 4 %Ant-partition
[Route,RouteLength,vehicles] = ANT_colony_algorithm_VRP( handles.distances_stations, ...
handles.distances_bases, handles.demands, [e alpha beta tau0], handles.vehicles);
case 5 %Ant-elite ants
[Route,RouteLength,vehicles] = ANT_colony_algorithm_VRP_with_elite_ants( ...
handles.distances_stations, handles.distances_bases, handles.demands, ...
[e alpha beta tau0 E], handles.vehicles);
end
tElapsed = toc(tStart); %end spent time
create_plot_route_with_vehicles( add_bases_to_distances(handles.distances_stations, ...
handles.distances_bases), vehicles, [0 handles.demands] );
catch ME
msgbox(strcat('Error occured: ',ME.message),'Error','error');
end
set(handles.lengthWayText,'String',num2str(RouteLength));
set(handles.subroutesNText,'String',num2str(number_of_subroutes(Route)));
set(handles.timeSpentText,'String',sprintf('%fs',tElapsed));
end
% --------------------------------------------------------------------
function dataTooltip_ClickedCallback(hObject, eventdata, handles)
% hObject handle to dataTooltip (see GCBO)
% eventdata reserved - to be defined in a future version of MATLAB
% handles structure with handles and user data (see GUIDATA)
% --------------------------------------------------------------------
function algorithmTooltip_ClickedCallback(hObject, eventdata, handles)
% hObject handle to algorithmTooltip (see GCBO)
% eventdata reserved - to be defined in a future version of MATLAB
% handles structure with handles and user data (see GUIDATA)
% --- Executes on selection change in listboxBases.
function listboxBases_Callback(hObject, eventdata, handles)
% hObject handle to listboxBases (see GCBO)
% eventdata reserved - to be defined in a future version of MATLAB
% handles structure with handles and user data (see GUIDATA)
% Hints: contents = cellstr(get(hObject,'String')) returns listboxBases contents as cell array
% contents{
get(hObject,'Value')} returns selected item from listboxBases
%clear legend
legend('off');
%clear plot
cla;
index = get(handles.listboxBases,'value') - 1;
if index == 0 %if user want to see the full graph of routes
create_plot_route_with_vehicles_MDVRP(handles.coordinates, handles.clusters);
set(handles.lengthWayText,'String','-');
set(handles.subroutesNText,'String','-');
else
create_plot_of_base_MDVRP(handles.coordinates, handles.clusters, index);
set(handles.lengthWayText,'String',num2str(handles.clusters(index).mdvrp.length_route));
set(handles.subroutesNText,'String',num2str(handles.clusters(index).mdvrp.num_of_subroutes));
end
% --- Executes during object creation, after setting all properties.
function listboxBases_CreateFcn(hObject, eventdata, handles)
% hObject handle to listboxBases (see GCBO)
% eventdata reserved - to be defined in a future version of MATLAB
% handles empty - handles not created until after all CreateFcns called
% Hint: listbox controls usually have a white background on Windows.
% See ISPC and COMPUTER.
if ispc && isequal(get(hObject,'BackgroundColor'), get(0,'defaultUicontrolBackgroundColor'))
set(hObject,'BackgroundColor','white');
end
% --------------------------------------------------------------------
function aboutMenu_Callback(hObject, eventdata, handles)
% hObject handle to aboutMenu (see GCBO)
% eventdata reserved - to be defined in a future version of MATLAB
% handles structure with handles and user data (see GUIDATA)
About %call gui About.m
% --------------------------------------------------------------------
function fileMenu_Callback(hObject, eventdata, handles)
% hObject handle to fileMenu (see GCBO)
% eventdata reserved - to be defined in a future version of MATLAB
% handles structure with handles and user data (see GUIDATA)
% --------------------------------------------------------------------
function anotherVRPSubmenu_Callback(hObject, eventdata, handles)
% hObject handle to anotherVRPSubmenu (see GCBO)
% eventdata reserved - to be defined in a future version of MATLAB
% handles structure with handles and user data (see GUIDATA)
% --------------------------------------------------------------------
function newDataSubmenu_Callback(hObject, eventdata, handles)
% hObject handle to newDataSubmenu (see GCBO)
% eventdata reserved - to be defined in a future version of MATLAB
% handles structure with handles and user data (see GUIDATA)
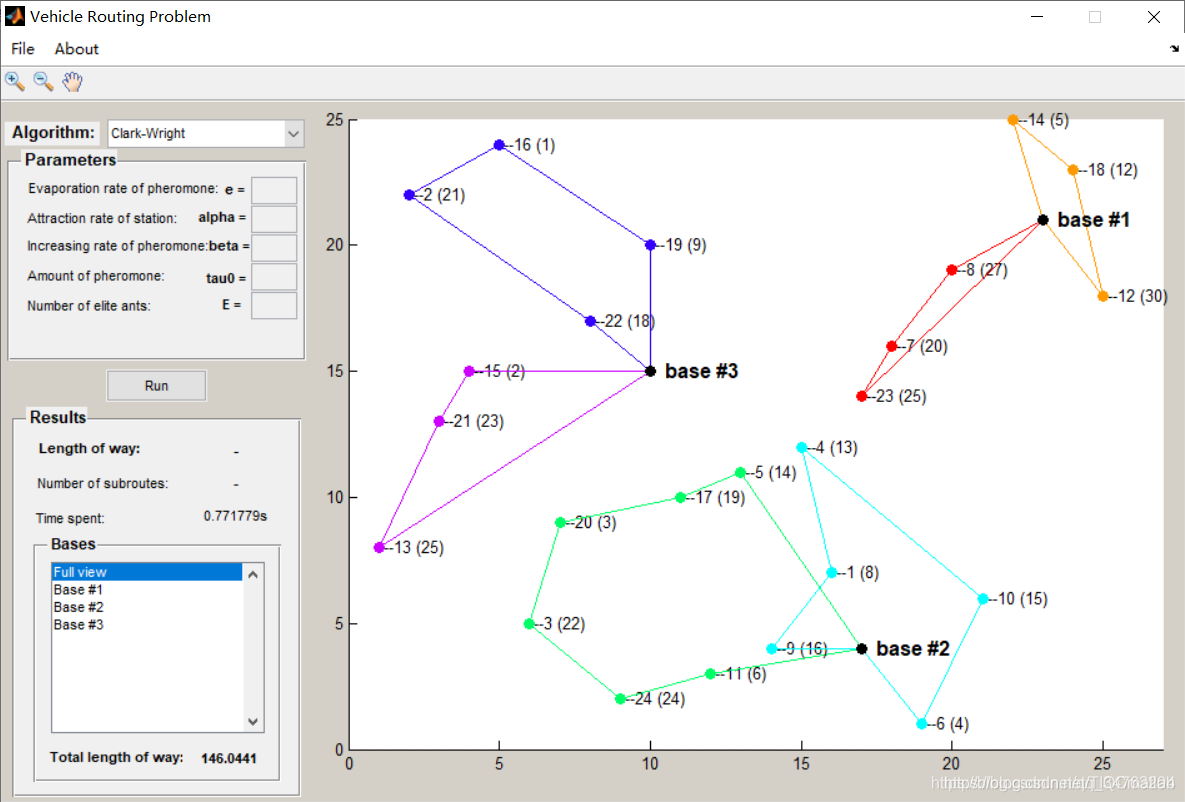
二、运行结果
三、备注
完整代码或者代写添加QQ912100926
往期回顾>>>>>>
【路径规划】粒子群优化算法之三维无人机路径规划【Matlab 012期】
【路径规划】遗传算法之多物流中心的开放式车辆路径规划【Matlab 013期】
【路径规划】粒子群算法之机器人栅格路径规划【Matlab 014期】
【路径规划】蚁群算法之求解最短路径【Matlab 015期】
【路径规划】免疫算法之物流中心选址【Matlab 016期】
【路径规划】人工蜂群之无人机三维路径规划【Matlab 017期】
【路径规划】遗传算法之基于栅格地图机器人路径规划【Matlab 018期】
【路径规划】蚁群算法之多无人机攻击调度【Matlab 019期】
【路径规划】遗传算法之基于栅格地图的机器人最优路径规划【Matlab 020期】
【路径规划】遗传算法之考虑分配次序的多无人机协同目标分配建模【Matlab 021期】
【路径规划】蚁群算法之多中心vrp问题【Matlab 022期】