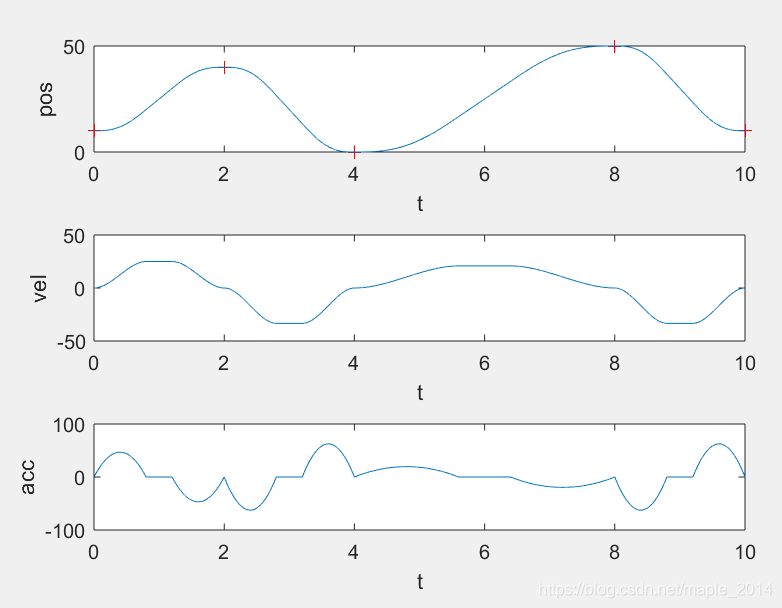
一、 经过所有中间点(MATLAB代码)
clc;
clear;
close all;
%{
syms ts te ps pe vs ve as ae T real;
a = [1, 0, 0, 0, 0, 0
0, 1, 0, 0, 0, 0
0, 0, 2, 0, 0, 0
1, T, T^2, T^3, T^4, T^5
0, 1, 2*T, 3*T^2, 4*T^3, 5*T^4
0, 0, 2, 6*T, 12*T^2, 20*T^3
] \ [ps; vs; as; pe; ve; ae];
a = [simplify(a(1)), simplify(a(2)), simplify(a(3)), simplify(a(4)), simplify(a(5)), simplify(a(6))]'
%}
t = [0, 2, 4, 8, 10]';
pos = [10, 20, 0, 30, 40]';
dt = 0.001;
n = length(t);
accelerationTimeRatio = 0.4 * ones(n - 1, 1); %加速段/减速段的比率,(0, 1/2)之间
tArray = [];
posArray = [];
velArray = [];
accArray = [];
tArray = [tArray; t(1)];
posArray = [posArray; pos(1)];
velArray = [velArray; 0.0];
accArray = [accArray; 0.0];
for i = 1 : n - 1
Ta = accelerationTimeRatio(i) * (t(i + 1) - t(i));
Ts = 0.5 * Ta;
%第一段五次多项式
ts = t(i);
te = t(i) + Ta;
ps = pos(i);
pe = (pos(i + 1) - pos(i)) / (t(i + 1) - 2.0 * Ts - t(i)) * (t(i) + Ta - (t(i) + Ts)) + pos(i);
vs = 0.0;
ve = (pos(i + 1) - pos(i)) / (t(i + 1) - 2.0 * Ts - t(i));
as = 0.0;
ae = 0.0;
h = pe - ps;
T = te - ts;
a0 = ps;
a1 = vs;
a2 = 0.5 * as;
a3 = (20.0 * h - (8.0 * ve + 12.0 * vs) * T - (3.0 * as - ae) * T^2) / (2.0 * T^3);
a4 = (-30.0 * h + (14.0 * ve + 16.0 * vs) * T + (3.0 * as - 2.0 * ae) * T^2) / (2.0 * T^4);
a5 = (12.0 * h - 6.0 * (ve + vs) * T - (as - ae) * T^2) / (2.0 * T^5);
tt = (ts + dt : dt : te)';
if abs(tt(end) - te) > 1.0e-8
tt = [tt; te];
end
tArray = [tArray; tt];
posArray = [posArray; a0 + (tt - ts) .* (a1 + (tt - ts) .* (a2 + (tt - ts) .* (a3 + (tt - ts) .* (a4 + a5 .* (tt - ts)))))];
velArray = [velArray; a1 + (tt - ts) .* (2.0 * a2 + (tt - ts) .* (3.0 * a3 + (tt - ts) .* (4.0 * a4 + 5.0 * a5 .* (tt - ts))))];
accArray = [accArray; 2.0 * a2 + (tt - ts) .* (6.0 * a3 + (tt - ts) .* (12.0 * a4 + 20.0 * a5 .* (tt - ts)))];
%第二段直线
ts = te;
te = t(i + 1) - Ta;
ps = pe;
pe = (pos(i + 1) - pos(i)) / (t(i + 1) - 2.0 * Ts - t(i)) * (t(i + 1) - Ta - (t(i) + Ts)) + pos(i);
h = pe - ps;
T = te - ts;
tt = (ts + dt : dt : te)';
if abs(tt(end) - te) > 1.0e-8
tt = [tt; te];
end
tArray = [tArray; tt];
posArray = [posArray; ps + h / T * (tt - ts)];
velArray = [velArray; h / T * ones(size(tt))];
accArray = [accArray; zeros(size(tt))];
%第三段五次多项式
ts = te;
te = t(i + 1);
ps = pe;
pe = pos(i + 1);
vs = ve;
ve = 0.0;
as = 0.0;
ae = 0.0;
h = pe - ps;
T = te - ts;
a0 = ps;
a1 = vs;
a2 = 0.5 * as;
a3 = (20.0 * h - (8.0 * ve + 12.0 * vs) * T - (3.0 * as - ae) * T^2) / (2.0 * T^3);
a4 = (-30.0 * h + (14.0 * ve + 16.0 * vs) * T + (3.0 * as - 2.0 * ae) * T^2) / (2.0 * T^4);
a5 = (12.0 * h - 6.0 * (ve + vs) * T - (as - ae) * T^2) / (2.0 * T^5);
tt = (ts + dt : dt : te)';
if abs(tt(end) - te) > 1.0e-8
tt = [tt; te];
end
tArray = [tArray; tt];
posArray = [posArray; a0 + (tt - ts) .* (a1 + (tt - ts) .* (a2 + (tt - ts) .* (a3 + (tt - ts) .* (a4 + a5 .* (tt - ts)))))];
velArray = [velArray; a1 + (tt - ts) .* (2.0 * a2 + (tt - ts) .* (3.0 * a3 + (tt - ts) .* (4.0 * a4 + 5.0 * a5 .* (tt - ts))))];
accArray = [accArray; 2.0 * a2 + (tt - ts) .* (6.0 * a3 + (tt - ts) .* (12.0 * a4 + 20.0 * a5 .* (tt - ts)))];
end
figure(1)
subplot(3, 1, 1)
plot(t, pos, 'r+');
hold on;
plot(tArray, posArray);
xlabel('t');
ylabel('pos');
subplot(3, 1, 2)
plot(tArray, velArray);
xlabel('t');
ylabel('vel');
subplot(3, 1, 3)
plot(tArray, accArray);
xlabel('t');
ylabel('acc');
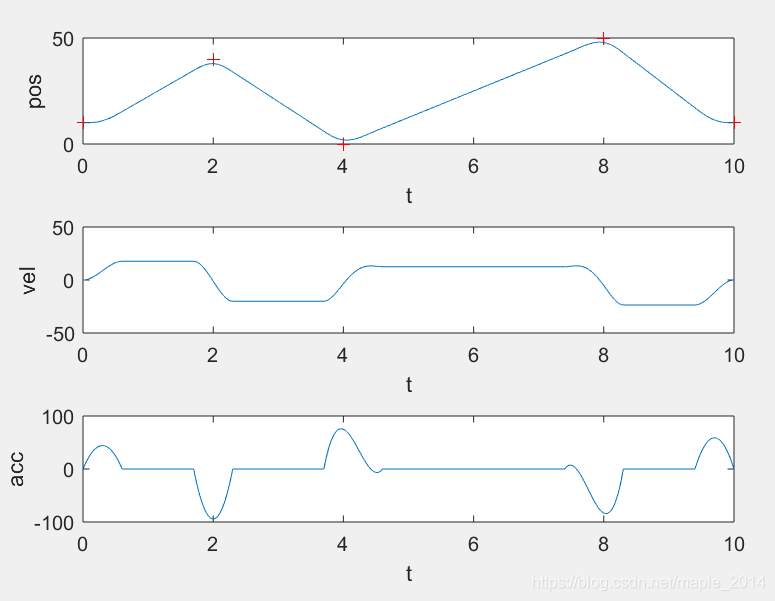
二、 靠近但不经过所有中间点(MATLAB代码)
clc;
clear;
close all;
%{
syms ts te ps pe vs ve as ae T real;
a = [1, 0, 0, 0, 0, 0
0, 1, 0, 0, 0, 0
0, 0, 2, 0, 0, 0
1, T, T^2, T^3, T^4, T^5
0, 1, 2*T, 3*T^2, 4*T^3, 5*T^4
0, 0, 2, 6*T, 12*T^2, 20*T^3
] \ [ps; vs; as; pe; ve; ae];
a = [simplify(a(1)), simplify(a(2)), simplify(a(3)), simplify(a(4)), simplify(a(5)), simplify(a(6))]'
%}
t = [0, 2, 4, 8, 10]';
pos = [10, 40, 0, 50, 10]';
dt = 0.001;
n = length(t);
accelerationTimeRatio = 0.3 * ones(n - 1, 1); %加速段/减速段的比率,(0, 1/2)之间
tArray = [];
posArray = [];
velArray = [];
accArray = [];
tArray = [tArray; t(1)];
posArray = [posArray; pos(1)];
velArray = [velArray; 0.0];
accArray = [accArray; 0.0];
if n == 2
Ta = accelerationTimeRatio(1) * (t(2) - t(1));
Ts = 0.5 * Ta;
%第一段五次多项式
ts = t(1);
te = t(1) + Ta;
ps = pos(1);
pe = (pos(2) - pos(1)) / (t(2) - 2.0 * Ts - t(1)) * (t(1) + Ta - (t(1) + Ts)) + pos(1);
vs = 0.0;
ve = (pos(2) - pos(1)) / (t(2) - 2.0 * Ts - t(1));
as = 0.0;
ae = 0.0;
h = pe - ps;
T = te - ts;
a0 = ps;
a1 = vs;
a2 = 0.5 * as;
a3 = (20.0 * h - (8.0 * ve + 12.0 * vs) * T - (3.0 * as - ae) * T^2) / (2.0 * T^3);
a4 = (-30.0 * h + (14.0 * ve + 16.0 * vs) * T + (3.0 * as - 2.0 * ae) * T^2) / (2.0 * T^4);
a5 = (12.0 * h - 6.0 * (ve + vs) * T - (as - ae) * T^2) / (2.0 * T^5);
tt = (ts + dt : dt : te)';
if abs(tt(end) - te) > 1.0e-8
tt = [tt; te];
end
tArray = [tArray; tt];
posArray = [posArray; a0 + (tt - ts) .* (a1 + (tt - ts) .* (a2 + (tt - ts) .* (a3 + (tt - ts) .* (a4 + a5 .* (tt - ts)))))];
velArray = [velArray; a1 + (tt - ts) .* (2.0 * a2 + (tt - ts) .* (3.0 * a3 + (tt - ts) .* (4.0 * a4 + 5.0 * a5 .* (tt - ts))))];
accArray = [accArray; 2.0 * a2 + (tt - ts) .* (6.0 * a3 + (tt - ts) .* (12.0 * a4 + 20.0 * a5 .* (tt - ts)))];
%第二段直线
ts = te;
te = t(2) - Ta;
ps = pe;
pe = (pos(2) - pos(1)) / (t(2) - 2.0 * Ts - t(1)) * (t(2) - Ta - (t(1) + Ts)) + pos(1);
h = pe - ps;
T = te - ts;
tt = (ts + dt : dt : te)';
if abs(tt(end) - te) > 1.0e-8
tt = [tt; te];
end
tArray = [tArray; tt];
posArray = [posArray; ps + h / T * (tt - ts)];
velArray = [velArray; h / T * ones(size(tt))];
accArray = [accArray; zeros(size(tt))];
%第三段五次多项式
ts = te;
te = t(2);
ps = pe;
pe = pos(2);
vs = ve;
ve = 0.0;
as = 0.0;
ae = 0.0;
h = pe - ps;
T = te - ts;
a0 = ps;
a1 = vs;
a2 = 0.5 * as;
a3 = (20.0 * h - (8.0 * ve + 12.0 * vs) * T - (3.0 * as - ae) * T^2) / (2.0 * T^3);
a4 = (-30.0 * h + (14.0 * ve + 16.0 * vs) * T + (3.0 * as - 2.0 * ae) * T^2) / (2.0 * T^4);
a5 = (12.0 * h - 6.0 * (ve + vs) * T - (as - ae) * T^2) / (2.0 * T^5);
tt = (ts + dt : dt : te)';
if abs(tt(end) - te) > 1.0e-8
tt = [tt; te];
end
tArray = [tArray; tt];
posArray = [posArray; a0 + (tt - ts) .* (a1 + (tt - ts) .* (a2 + (tt - ts) .* (a3 + (tt - ts) .* (a4 + a5 .* (tt - ts)))))];
velArray = [velArray; a1 + (tt - ts) .* (2.0 * a2 + (tt - ts) .* (3.0 * a3 + (tt - ts) .* (4.0 * a4 + 5.0 * a5 .* (tt - ts))))];
accArray = [accArray; 2.0 * a2 + (tt - ts) .* (6.0 * a3 + (tt - ts) .* (12.0 * a4 + 20.0 * a5 .* (tt - ts)))];
else
t_ = zeros(2 * n, 1);
p = zeros(2 * n, 1);
v = zeros(2 * n, 1);
Ta = accelerationTimeRatio(1) * (t(2) - t(1));
Ts = 0.5 * Ta;
t_(1) = t(1);
p(1) = pos(1);
v(1) = 0.0;
t_(2) = t(1) + Ta;
p(2) = (pos(2) - pos(1)) / (t(2) - (t(1) + Ts)) * (t_(2) - t(2)) + pos(2);
v(2) = (pos(2) - pos(1)) / (t(2) - (t(1) + Ts));
t_(3) = t(2) - Ts;
p(3) = (pos(2) - pos(1)) / (t(2) - (t(1) + Ts)) * (t_(3) - t(2)) + pos(2);
v(3) = (pos(2) - pos(1)) / (t(2) - (t(1) + Ts));
Ta = accelerationTimeRatio(n - 1) * (t(n) - t(n - 1));
Ts = 0.5 * Ta;
t_(2 * n) = t(n);
p(2 * n) = pos(n);
v(2 * n) = 0.0;
t_(2 * n - 1) = t(n) - Ta;
p(2 * n - 1) = (pos(n) - pos(n - 1)) / (t(n) - Ts - t(n - 1)) * (t_(2 * n - 1) - t(n - 1)) + pos(n - 1);
v(2 * n - 1) = (pos(n) - pos(n - 1)) / (t(n) - Ts - t(n - 1));
t_(2 * n - 2) = t(n - 1) + Ts;
p(2 * n - 2) = (pos(n) - pos(n - 1)) / (t(n) - Ts - t(n - 1)) * (t_(2 * n - 2) - t(n - 1)) + pos(n - 1);
v(2 * n - 2) = (pos(n) - pos(n - 1)) / (t(n) - Ts - t(n - 1));
k = 4;
for i = 2 : n - 2
Ta = accelerationTimeRatio(i) * (t(i + 1) - t(i));
Ts = 0.5 * Ta;
t_(k) = t(i) + Ts;
p(k) = (pos(i + 1) - pos(i)) / (t(i + 1) - t(i)) * (t_(k) - t(i)) + pos(i);
v(k) = (pos(i + 1) - pos(i)) / (t(i + 1) - t(i));
t_(k + 1) = t(i + 1) - Ts;
p(k + 1) = (pos(i + 1) - pos(i)) / (t(i + 1) - t(i)) * (t_(k + 1) - t(i)) + pos(i);
v(k + 1) = (pos(i + 1) - pos(i)) / (t(i + 1) - t(i));
k = k + 2;
end
for i = 1 : 2 * n - 1
ts = t_(i);
te = t_(i + 1);
ps = p(i);
pe = p(i + 1);
vs = v(i);
ve = v(i + 1);
as = 0.0;
ae = 0.0;
h = pe - ps;
T = te - ts;
tt = (ts + dt : dt : te)';
if abs(tt(end) - te) > 1.0e-8
tt = [tt; te];
end
tArray = [tArray; tt];
if mod(i, 2) == 1 %五次多项式
a0 = ps;
a1 = vs;
a2 = 0.5 * as;
a3 = (20.0 * h - (8.0 * ve + 12.0 * vs) * T - (3.0 * as - ae) * T^2) / (2.0 * T^3);
a4 = (-30.0 * h + (14.0 * ve + 16.0 * vs) * T + (3.0 * as - 2.0 * ae) * T^2) / (2.0 * T^4);
a5 = (12.0 * h - 6.0 * (ve + vs) * T - (as - ae) * T^2) / (2.0 * T^5);
posArray = [posArray; a0 + (tt - ts) .* (a1 + (tt - ts) .* (a2 + (tt - ts) .* (a3 + (tt - ts) .* (a4 + a5 .* (tt - ts)))))];
velArray = [velArray; a1 + (tt - ts) .* (2.0 * a2 + (tt - ts) .* (3.0 * a3 + (tt - ts) .* (4.0 * a4 + 5.0 * a5 .* (tt - ts))))];
accArray = [accArray; 2.0 * a2 + (tt - ts) .* (6.0 * a3 + (tt - ts) .* (12.0 * a4 + 20.0 * a5 .* (tt - ts)))];
else %直线
posArray = [posArray; ps + h / T * (tt - ts)];
velArray = [velArray; h / T * ones(size(tt))];
accArray = [accArray; zeros(size(tt))];
end
end
end
figure(1)
subplot(3, 1, 1)
plot(t, pos, 'r+');
hold on;
plot(tArray, posArray);
xlabel('t');
ylabel('pos');
subplot(3, 1, 2)
plot(tArray, velArray);
xlabel('t');
ylabel('vel');
subplot(3, 1, 3)
plot(tArray, accArray);
xlabel('t');
ylabel('acc');
三、参考文献
Trajectory Planning for Automatic Machines and Robots中章节:3.3 Linear Trajectory with Polynomial Blends