摘要
Ray-AABB问题:判断线段是否相交于轴对齐边界框(Axially Aligned Bounding Box, AABB)
本文介绍了slab算法的实现,从一个简单实现开始,逐步优化slab算法,算法加速和并进行边界情况处理。
本文转载并翻译自:
- FAST, BRANCHLESS RAY/BOUNDING BOX INTERSECTIONS
- FAST, BRANCHLESS RAY/BOUNDING BOX INTERSECTIONS, PART 2: NANS
第一部分:简单实现
轴对齐包围盒(AABB)通常用于限制光线跟踪中的有限对象。 射线/ AABB交点通常比精确的射线/对象交点计算得更快,并允许构造边界体积层次结构(BVH),减少了每条射线需要考虑的对象数量。 (这将在以后的文章中详细介绍BVH。)这意味着光线跟踪器会花费大量时间来计算光线/ AABB交点,因此应高度优化此代码。
进行ray / AABB相交的最快方法是slab方法。 想法是将盒子视为三对平行平面内的空间。 射线被每对平行平面夹住,并且如果射线的任何部分保留下来,它将与盒子相交。

v1.0 简单实现版本
此算法的简单实现可能看起来像这样(为简洁起见,在两个维度中):
bool intersection(box b, ray r) {
double tmin = -INFINITY, tmax = INFINITY;
if (ray.n.x != 0.0) {
double tx1 = (b.min.x - r.x0.x)/r.n.x;
double tx2 = (b.max.x - r.x0.x)/r.n.x;
tmin = max(tmin, min(tx1, tx2));
tmax = min(tmax, max(tx1, tx2));
}
if (ray.n.y != 0.0) {
double ty1 = (b.min.y - r.x0.y)/r.n.y;
double ty2 = (b.max.y - r.x0.y)/r.n.y;
tmin = max(tmin, min(ty1, ty2));
tmax = min(tmax, max(ty1, ty2));
}
return tmax >= tmin;
}
但是,这些部门要花很多时间。 由于在进行射线追踪时,同一束射线是针对许多ABB进行测试的,因此预先计算射线方向分量的逆数是有意义的。 如果我们可以依靠IEEE 754浮点属性,则这也可以隐式处理方向分量为零的边缘情况-例如,如果射线在射线的范围内,则tx1和tx2值将是相反符号的无穷大。 平板,因此tmin和tmax保持不变。 如果光线在平板之外,则tx1和tx2将是具有相同符号的无限大,从而使tmin == + inf或tmax == -inf,从而导致测试失败。
v1.1 版本
最终的实现如下所示:
bool intersection(box b, ray r) {
double tx1 = (b.min.x - r.x0.x)*r.n_inv.x;
double tx2 = (b.max.x - r.x0.x)*r.n_inv.x;
double tmin = min(tx1, tx2);
double tmax = max(tx1, tx2);
double ty1 = (b.min.y - r.x0.y)*r.n_inv.y;
double ty2 = (b.max.y - r.x0.y)*r.n_inv.y;
tmin = max(tmin, min(ty1, ty2));
tmax = min(tmax, max(ty1, ty2));
return tmax >= tmin;
}
由于现代浮点指令集可以在没有分支的情况下计算最小值和最大值,因此可以进行无分支或除法的ray / AABB交集测试。
在我写的光线追踪器 Dimension 中对此的实现可以在这里看到。
第二部分:考虑线段与平板重合的情况
在第1部分中,我概述了一种用于计算光线和与轴对齐的边界框之间的交点的算法。 依靠IEEE 754浮点属性消除分支的想法可以追溯到[1]中的Brian Smits,该实现被Amy Williams充实了。 等。 在[2]中。
v2.0
为了快速回顾一下,该想法是替换朴素的平板方法:
bool intersection(box b, ray r) {
double tmin = -INFINITY, tmax = INFINITY;
for (int i = 0; i < 3; ++i) {
if (ray.dir[i] != 0.0) {
double t1 = (b.min[i] - r.origin[i])/r.dir[i];
double t2 = (b.max[i] - r.origin[i])/r.dir[i];
tmin = max(tmin, min(t1, t2));
tmax = min(tmax, max(t1, t2));
} else if (ray.origin[i] <= b.min[i] || ray.origin[i] >= b.max[i]) {
return false;
}
}
return tmax > tmin && tmax > 0.0;
}
v2.1
v2.0的等价写法,但是比v2.0要更快:
bool intersection(box b, ray r) {
double tmin = -INFINITY, tmax = INFINITY;
for (int i = 0; i < 3; ++i) {
double t1 = (b.min[i] - r.origin[i])*r.dir_inv[i];
double t2 = (b.max[i] - r.origin[i])*r.dir_inv[i];
tmin = max(tmin, min(t1, t2));
tmax = min(tmax, max(t1, t2));
}
return tmax > max(tmin, 0.0);
}
这两种算法真的等效吗? 我们已经依靠IEEE 754浮点行为消除了 r a y . d i r i ≠ 0 ray.dir_i ≠ 0 ray.diri=0 检查。 当 r a y . d i r i = ± 0 ray.dir_i = ±0 ray.diri=±0时, r a y . d i r _ i n v i = ± ∞ ray.dir\_inv_i =±∞ ray.dir_invi=±∞ 。如果射线原点的 i i i坐标在框内,则意味着 b . m i n i < r . o r i g i n i < b . m a x i b.min_i <r.origin_i <b.max_i b.mini<r.origini<b.maxi ,我们将得到 t 1 = − t 2 = ± ∞ t1 = −t2 =±∞ t1=−t2=±∞ 。 由于对于所有 n n n 的 m a x ( n , − ∞ ) = m i n ( n , + ∞ ) = n max(n,-∞)= min(n,+∞)= n max(n,−∞)=min(n,+∞)=n,因此tmin和tmax将保持不变。
另一方面,如果 $i 坐 标 在 框 外 ( 坐标在框外( 坐标在框外(r.origin_i <b.min_i$ 或 r . o r i g i n i > b . m a x i r.origin_i> b.max_i r.origini>b.maxi),则 t 1 = t 2 = ± ∞ t1 = t2 =±∞ t1=t2=±∞,因此 t m i n = + ∞ 或 t m a x = − ∞ tmin = +∞或 tmax =-∞ tmin=+∞或tmax=−∞ 。 这些值之一将贯穿算法的其余部分,从而导致我们返回false。
不幸的是,上述分析有一个警告:如果射线正好位于平板上( r . o r i g i n i = b . m i n i 或 r . o r i g i n i = b . m a x i r.origin_i = b.min_i或r.origin_i = b.max_i r.origini=b.mini或r.origini=b.maxi),我们将拥有(说)
t 1 = ( b . m i n i − r . o r i g i n i ) ⋅ r . d i r i n v i = 0 ⋅ ∞ = N a N \begin{aligned} t1 =& (b.min_i−r.origin_i)⋅r.dirinv_i \\ =& 0⋅∞ \\ =& NaN \end{aligned} t1===(b.mini−r.origini)⋅r.dirinvi0⋅∞NaN
这表现得比无穷大得多。 正确处理此边缘(字面意义!)的情况取决于min()和max()的确切行为。
关于min()和max()
min()和max()的最常见实现可能是
#define min(x, y) ((x) < (y) ? (x) : (y))
#define max(x, y) ((x) > (y) ? (x) : (y))
这种形式是如此普遍,以至于被称为SSE / SSE2指令集中的最小/最大指令的行为。 使用这些指令是从算法中获得良好性能的关键。 话虽如此,这种形式具有涉及NaN的某些奇怪行为。 由于所有与NaN的比较都是错误的,
m i n ( x , N a N ) = m a x ( x , N a N ) = N a N m i n ( N a N , x ) = m a x ( N a N , x ) = x \begin{aligned} min(x,NaN) =& max(x,NaN) =& NaN \\ min(NaN,x) =& max(NaN,x) =& x \end{aligned} min(x,NaN)=min(NaN,x)=max(x,NaN)=max(NaN,x)=NaNx
这些操作既不传播也不抑制NaN。 相反,当其中一个参数为NaN时,总是返回第二个参数。 (关于有符号零,也有类似的奇数行为,但这并不影响此算法。)
相反,IEEE 754指定的最小/最大操作(称为“ minNum”和“ maxNum”)抑制NaN,如果可能的话总是返回一个数字。 这也是C99的fmin()和fmax()函数的行为。 另一方面,Java的Math.min()和Math.max()函数传播NaN,与大多数其他对浮点值的二进制运算保持一致。 [3]和[4]对野外的各种最小/最大实现进行了更多讨论。
存在问题
min()和max()的IEEE和Java版本提供一致的行为:恰好位于板上的所有光线均被视为不与盒子相交。 很容易理解为什么要使用Java版本,因为NaN最终会污染所有计算,并使我们返回false。 对于IEEE版本, m i n ( t 1 , t 2 ) = m a x ( t 1 , t 2 ) = ± ∞ min(t1,t2)=max(t1,t2)=±∞ min(t1,t2)=max(t1,t2)=±∞,与射线完全在盒子外面时相同。
(由于这是一个极端的情况,您可能想知道为什么我们不选择对边界上的光线返回true而不是false。事实证明,使用高效代码来实现此行为要困难得多。)
使用对SSE友好的最小/最大实现,行为是不一致的。 平板上的某些光线会相交,即使它们完全位于盒子的另一个维度之外:
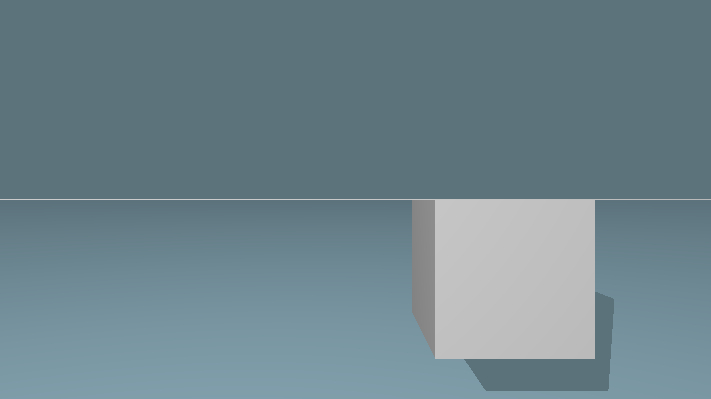
在上面的图像中,相机位于立方体的顶面的平面中,并且使用上述算法计算了交点。 由于不正确的NaN处理,顶面超出了侧面。
v2.2 解决方案
当最多一个参数是NaN时,我们可以使用
m i n N u m ( x , y ) = m i n ( x , m i n ( y , ∞ ) ) m a x N u m ( x , y ) = m a x ( x , m a x ( y , − ∞ ) ) \begin{aligned} minNum(x,y) =& min(x,min(y,∞)) \\ maxNum(x,y) =& max(x,max(y,−∞)) \end{aligned} minNum(x,y)=maxNum(x,y)=min(x,min(y,∞))max(x,max(y,−∞))
Thierry Berger-Perrin在[5]中采用了类似的策略,可以有效地进行计算
tmin = max(tmin, min(min(t1, t2), INFINITY));
tmax = min(tmax, max(max(t1, t2), -INFINITY));
在循环中。 这样做也很好。由于CPU处理浮点特殊情况(无穷大,NaN,次正规)的速度较慢,因此改成下面这样速度要比上面快30%左右。
tmin = max(tmin, min(min(t1, t2), tmax));
tmax = min(tmax, max(max(t1, t2), tmin));
出于同样的原因,最好像这样展开循环,以避免处理不必要的更多无穷大:
bool intersection(box b, ray r) {
double t1 = (b.min[0] - r.origin[0])*r.dir_inv[0];
double t2 = (b.max[0] - r.origin[0])*r.dir_inv[0];
double tmin = min(t1, t2);
double tmax = max(t1, t2);
for (int i = 1; i < 3; ++i) {
t1 = (b.min[i] - r.origin[i])*r.dir_inv[i];
t2 = (b.max[i] - r.origin[i])*r.dir_inv[i];
tmin = max(tmin, min(min(t1, t2), tmax));
tmax = min(tmax, max(max(t1, t2), tmin));
}
return tmax > max(tmin, 0.0);
}
很难理解为什么这个版本是正确的:x坐标的任何NaN都会传播到末端,而其他坐标的NaN将导致tmin≥tmax。 在两种情况下,都返回false。
使用-O3的GCC 4.9.2,该实现每秒处理超过9300万条射线,这意味着即使没有向量化,运行时间也大约是30个时钟周期!
v2.3 更好的解决方案
可悲的是,这仍然比没有显式NaN处理的版本慢15%。 而且由于遍历有界体积层次结构时通常使用此算法,因此最糟糕的事情是,在退化情况下遍历过多的节点。 对于许多应用程序而言,这是非常值得的,并且如果正确实现射线/物体相交功能,则在实践中绝不应导致任何视觉伪影。 为了完整起见,这是一个快速实施(1.08亿射线/秒),它不会尝试一致地处理NaN:
bool intersection(box b, ray r) {
double t1 = (b.min[0] - r.origin[0])*r.dir_inv[0];
double t2 = (b.max[0] - r.origin[0])*r.dir_inv[0];
double tmin = min(t1, t2);
double tmax = max(t1, t2);
for (int i = 1; i < 3; ++i) {
t1 = (b.min[i] - r.origin[i])*r.dir_inv[i];
t2 = (b.max[i] - r.origin[i])*r.dir_inv[i];
tmin = max(tmin, min(t1, t2));
tmax = min(tmax, max(t1, t2));
}
return tmax > max(tmin, 0.0);
}
在[6]中给出了我用来测试各种cross()实现的程序。 在有关该主题的下一篇文章中,我将讨论低级实现的细节,包括矢量化,以从该算法中获得最大的性能。
[1]: Brian Smits: Efficiency Issues for Ray Tracing. Journal of Graphics Tools (1998).
[2]: Amy Williams. et al.: An Efficient and Robust Ray-Box Intersection Algorithm. Journal of Graphics Tools (2005).
[3]: https://groups.google.com/forum/#!topic/llvm-dev/-SKl0nOJW_w
[4]: https://ghc.haskell.org/trac/ghc/ticket/9251
[5]: http://www.flipcode.com/archives/SSE_RayBox_Intersection_Test.shtml
[6]: https://gist.github.com/tavianator/132d081ed4d410c755fd
相关/参考链接
- FAST, BRANCHLESS RAY/BOUNDING BOX INTERSECTIONS | 有动态图,讲解了Kay, T. L. and Kajiya等人提出的slab方法。展示了从基本实现到一个比较好的实现的过程,代码无分支结构,适用于并行处理器。
- FAST, BRANCHLESS RAY/BOUNDING BOX INTERSECTIONS, PART 2: NANS | 上一篇文章的改进,上一版中代码已基本可用,但是在射线与平板重合的时候失效,这时候会存再NaN值,本文讨论并高效的解决了这个问题。