前言
看到左高树的时候,对左高树的印象大概只有左高树这三个字了。看的时候费劲了一点,因为不知道这个数据结构是干嘛的。网上的资料也比较少。所以这篇文章理解能力有限,请见谅。
左高树
什么是左高树?
左高树大致分为高度优先左高树和重量优先左高树两类。
本文以高度优先左高树为例。
左高树中定义了几个新的概念,比如外部节点、内部节点和扩充二叉树。
- 外部节点:一类特殊的节点,假设原本的树中节点x的任意孩子节点为空,可以将该指针指向外部节点。
- 内部节点:至少有一个孩子节点不为空的节点叫做内部节点。
- 扩充二叉树:增加了外部节点的二叉树。
我原以为这是很重要的概念,但是后面函数实现中却不曾用过。所以我暂且认为这几个概念是为了更形象的定义s(x)。
s(x)是一个函数,代表了内部节点x到其子树外部节点的最短路径。
如果x是外部节点,那么s(x)= 0。
如果x是内部节点 ,那么s(x) >= 1.
如果x的一个孩子s(x1) = 1,另一个孩子s(x2) = 2,那么s(x) = 2
一颗二叉树称为高度优先二叉树(height-biased leftist tree,HBLT)。当且仅当其任何一个内部节点的左孩子的s(x) 值都大于或等于右孩子的s值。
++++++++++++++++++++分割线+++++++++++++++++++++++++++++++++++++++++++
在之后的二叉树实现中,所有结点都为内部节点,即叶节点也为内部节点,且叶节点的s(x) = 1。也就是说外部节点隐式存在。
为什么要使用左高树?
书上的解释为堆(Heap)并不适合所有优先级队列的应用,尤其是当两个优先级队列或多个长度不同的队列需要合并时,需要使用左高树,左高树可在对数时间内实现两个优先级队列的合并。
假设有两个优先级队列,节点数为n、m。且n>m。
不考虑节点数的增长,用堆实现合并时间复杂度至少需要O(mlogn),即一个节点一个节点插进去。
而左高树的可以在 O(log(mn)) 的时间复杂度下实现合并。
优势已经显现
撒,我们马上实现试试!
最大左高树实现及复杂度分析
最大左高树:是左高树也是大根树。
因为左高树需要表示优先级队列,需要维护节点的优先级,所以是一颗左高树的同时也需要是一颗大根/小根树。
节点类和最大左高树类
template <class T>
class HBLTNode
{
friend MaxHBLT<T>;
public:
HBLTNode(const T& e, const int s)
{
data = e;
this->s = s;
leftChild = rightChild = NULL;
}
private:
int s;
T data;
HBLTNode<T>* leftChild;
HBLTNode<T>* rightChild;
};
// 最大HBLT类
template <class T>
class MaxHBLT
{
public:
MaxHBLT(){root = NULL;}
~MaxHBLT(){free(root);}
const T& top(){if(!root) throw "Tree is empty.";}
void push(const T& x);
const T& pop();
MaxHBLT<T>& meld(HBLTNode<T>& x)
{
meld(root, x.root);
x.root = NULL;
return *this;
}
void initialize(T a[], int n);
private:
void free(HBLTNode* t);
void meld(HBLTNode* x, HBLTNode* y);
HBLTNode* root;
};
合并方法
template <class T>
void mexHBLT<T> :: meld(HBLTNode* x, HBLTNode* y)
{
// 合并后左高树以x为根,返回x的指针
if(y == NULL)
return;
if(x == NULL)
{
x = y;
return;
}
// x和y都不空,必要时交换x和y,直接交换节点地址,真ne到
if(x->data < y->data)
swap(x, y);
// 目前x->data >= y->data
// 继续在右路径合并
meld(x->rightChild, y);
// 因为swap函数不处理空对象,单独交换
if(x->leftChild == NULL)
{
x->leftChild = x->rightChild;
x->rightChild = NULL;
x->s = 1;
}
else // 如果右边的s(x)比左边大,不符合左高树规则,交换
{
if(x->leftChild->s < x->rightChild->s)
swap(x->leftChild, x->rightChild);
x->s = x->rightChild->s + 1;
}
}
时间复杂度:
遍历沿右路径进行,所以递归次数应该为两个树根节点的s(x)加起来,设两个树的节点数目为m、n。那么两颗树的s(x)最大为log(m+1)、log(n+1)(因为s(x)小于等于完全二叉树的高度)。
那么时间复杂度为O(logm+logn) = O(log(mn))
插入(push)、删除(pop)
template <class T>
void MaxHBLT<T> :: push(const T& x)
{
HBLTNode<T> *q = new HBLTNode<T>(x, 1);
meld(root,q);
}
template class<T>
const T& MaxHBLT<T> :: pop()
{
T res;
if(root == NULL)
throw "The tree is empty.";
res = root->data;
HBLTNode<T>* l = root->leftChild;
HBLTNode<T>* r = root->rightChild;
delete root;
root = l;
meld(root, R);
return res;
}
时间复杂度:
插入每次插入一个节点,逻辑为只有一个节点的树与原有的树合并,根据合并的时间复杂度,m = 1,插入时间复杂度为O(logn)。
删除的逻辑为删除根节点,分为两颗左高树,再将两颗树合并,时间复杂度为O(logn)。
初始化
template <class T>
void MaxHBLT<T> :: initialize(T a[], int n)
{
Queue<HBLTNode<T>> q(n);
free(root); //删除原来的树
for(int i = 1; i <= n; i++)
{
HBLTNode<T> *t = new HBLTNode(a[i], 1);
q.push(t);
}
for(int i = 1; i <= n-1; i++)
{
HBLTNode<T> *a = q.pop();
HBLTNode<T> *b = q.pop();
meld(a, b);
q.push(a);
}
if(n > 0)
root = q.pop();
}
时间复杂度:
初始化的逻辑为,假设有n个元素,提供一队列,每次pop出两颗树(一个节点也视为一颗左高树),合并后,加入队列,合并(n-1)次,队列中剩下的唯一一颗树变为实现完成的最大左高树。
为什么合并n-1次?
当n为偶数时
假设存在一个以2为公比的等比数列,由求和公式有以下等式成立:
第n项 = 前n-1项部分和 + 1
合并次数就是前n-1项部分和,节点个数便是第n项。
比如有8个元素,需要先合并4次,再合并2次,最后合并1次,共合并7次。
当n为奇数时
可视为在偶数的基础上加了一个元素,多一次合并操作,仍然还是需要合并n-1次。
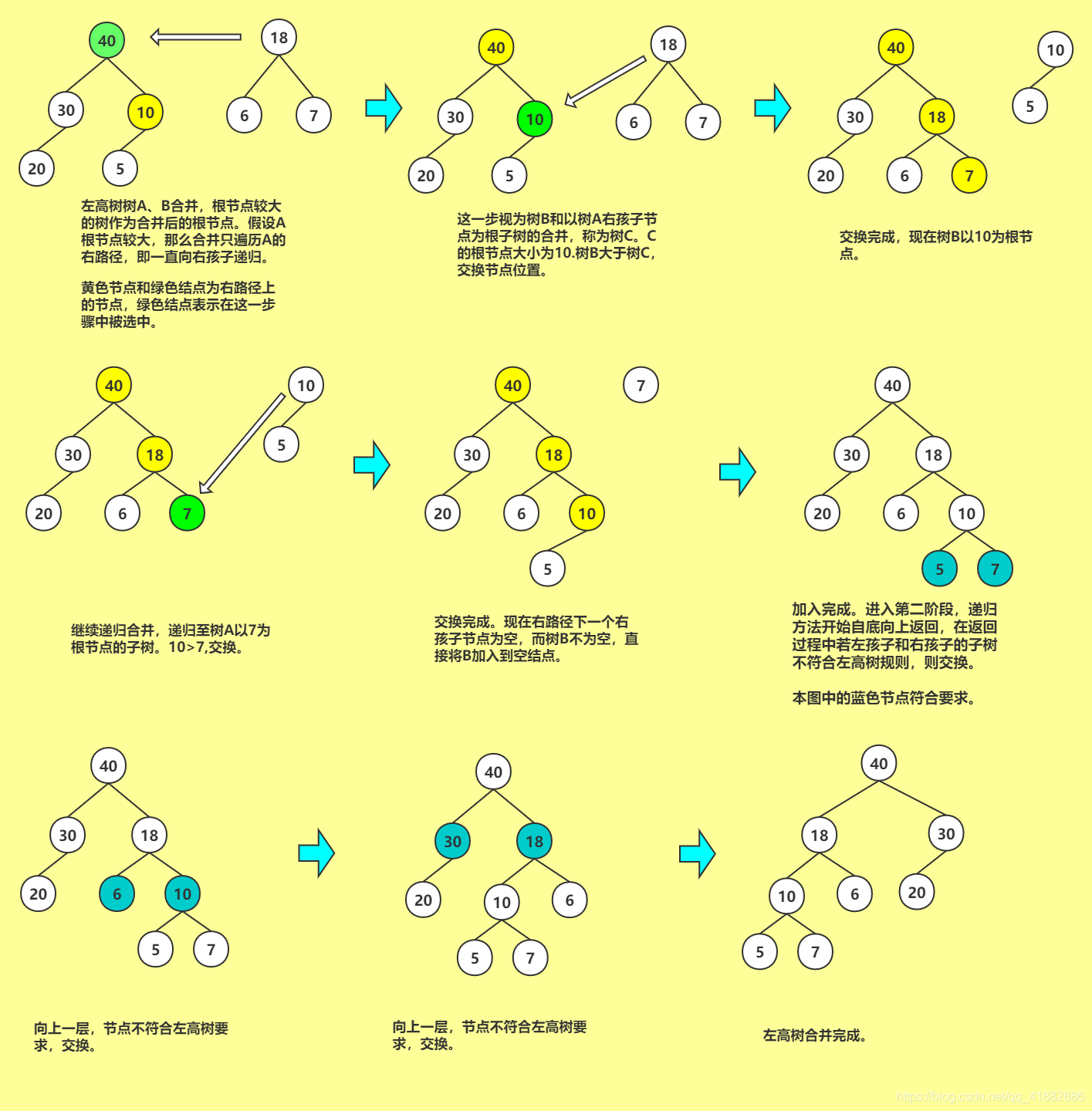
左高树合并图解
因为左高树合并操作我没有找到很细致的图,在理解时捋的合并方法代码,不直观,便自己画了一个,希望可以帮助理解。