相对于随机森林使用 bagging 融合完全长成决策树,梯度提升决策树使用的 boosting 的改进版本 AdaBoost 技术的广义版本,也就是说是根据损失函数的梯度方向,所以叫做梯度提升(Gradient Boosting)。
XGBoost 实际上就是对全部的决策树输出取加权平均,加权值为衰减系数或者1。当前 k - 1 颗树已经训练好时,对 k 颗树集成后的损失函数取二阶泰勒展开(在前 k - 1 颗树的集成模型处),便可以根据一阶导数和二阶导数求出最佳的解和目标值,但是前提是已知最佳的分组。这里最佳的分组的获取分为两个部分:当前特征维度上的最佳分割点、全部特征中的最佳分割特征。那么单个特征维度上的最佳分割点是通过对当前分支上全部的样本根据该特征进行排序,然后从头到尾穷举寻找到最佳分割点。最佳分割特征则是根据特征的最佳目标值获取全部特征中的最佳特征。由于穷举是很费时间的,所以这里也采用一种分桶操作提高效率,做分桶时是根据二阶导数对当前特征值排序后,再按分位数进行分桶的。
下面进行详细的分析:
假设叶子节点的排列顺序是从左到右,使用
w
m
(
k
)
w^{(k)}_m
w m ( k )
T
T
T
w
(
k
)
=
(
w
1
(
k
)
,
w
2
(
k
)
,
⋯
,
w
K
(
k
)
)
w^{(k)} = (w^{(k)}_1,w^{(k)}_2,\cdots,w^{(k)}_K)
w ( k ) = ( w 1 ( k ) , w 2 ( k ) , ⋯ , w K ( k ) )
为了推导简单下文中使用
w
w
w
w
(
k
)
w^{(k)}
w ( k ) 。
同时使用
q
(
k
)
(
x
i
)
q^{(k)} ( x_i )
q ( k ) ( x i )
x
i
x_i
x i 为了推导简单下文中使用
q
(
x
i
)
q ( x_i )
q ( x i )
q
(
k
)
(
x
i
)
q^{(k)} ( x_i )
q ( k ) ( x i ) 即
w
q
(
x
i
)
w_{q ( x_i )}
w q ( x i )
x
i
x_i
x i
f
k
(
x
i
)
f _ { k } \left( x _ { i } \right)
f k ( x i )
另外使用集合
I
t
(
k
)
I^{(k)} _ { t }
I t ( k )
I
t
(
k
)
=
{
x
i
∣
q
(
k
)
(
x
i
)
=
t
}
I ^{(k)}_ { t } = \left\{ x_i | q^{(k)} \left( { x } _ { i } \right) = { t } \right\}
I t ( k ) = { x i ∣ q ( k ) ( x i ) = t }
为了推导简单下文中使用
I
j
I _ { j }
I j
I
j
(
k
)
I ^{(k)}_ { j }
I j ( k )
给定一个有 n 个样本和 m 个特征的数据集
D
=
{
(
x
i
,
y
i
)
}
(
∣
D
∣
=
n
,
x
i
∈
R
m
,
y
i
∈
R
)
\mathcal { D } = \left\{ \left( \mathbf { x } _ { i } , y _ { i } \right) \right\} \left( | \mathcal { D } | = n , \mathbf { x } _ { i } \in \mathbb { R } ^ { m } , y _ { i } \in \mathbb { R } \right)
D = { ( x i , y i ) } ( ∣ D ∣ = n , x i ∈ R m , y i ∈ R )
f
k
(
x
i
)
f _ { k } \left( x _ { i } \right)
f k ( x i )
y
^
i
\hat { y } _ { i }
y ^ i
y
^
i
=
ϕ
(
x
i
)
=
∑
k
=
1
K
f
k
(
x
i
)
,
f
k
∈
F
\hat { y } _ { i } = \phi \left( \mathbf { x } _ { i } \right) = \sum _ { k = 1 } ^ { K } f _ { k } \left( \mathbf { x } _ { i } \right) , \quad f _ { k } \in \mathcal { F }
y ^ i = ϕ ( x i ) = k = 1 ∑ K f k ( x i ) , f k ∈ F
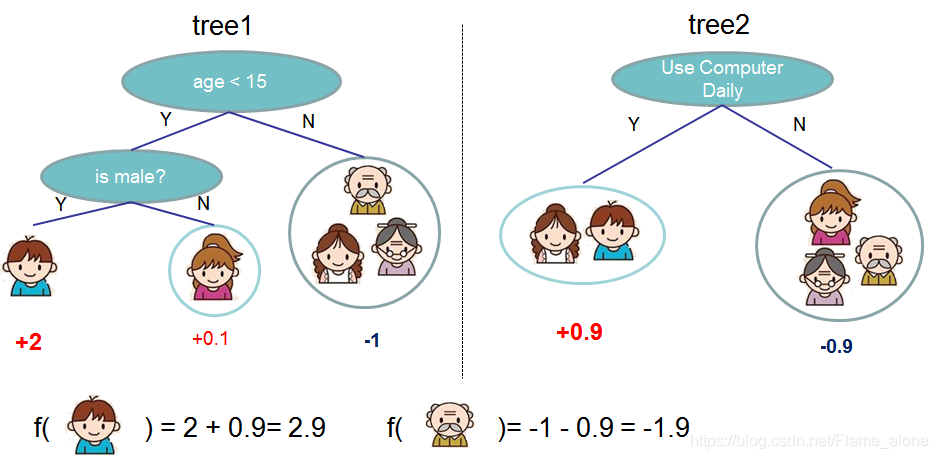
该集成方法以下图为例:
可以看出与广义的 GBDT 不同的地方是其系数是 1 。
可以看出这是一种 Additive Training(叠加式的训练),因为其本身也是一种 GBDT,所以其训练过程也是需要使用前一个 hypothesis 的预测余数进行下一个 hypothesis 的获取的。也就是说其每颗树模型的预测值可以做如下传递:
y
^
i
(
0
)
=
0
←
Default case
y
^
i
(
1
)
=
f
1
(
x
j
)
=
y
^
i
0
+
f
1
(
x
i
)
y
^
i
(
2
)
=
f
1
(
x
i
)
+
f
2
(
x
0
)
=
y
^
i
(
2
)
+
f
2
(
x
2
)
⋮
y
^
i
(
k
)
=
f
1
(
x
0
)
+
f
2
(
x
i
)
+
⋯
+
f
k
(
x
i
)
=
∑
j
=
1
(
k
−
1
)
f
j
(
x
i
)
+
f
k
(
x
i
)
=
y
^
i
(
k
−
1
)
+
f
k
(
x
i
)
\begin{aligned} \hat { y } _ { i } ^ { ( 0 ) } & = 0 \quad \leftarrow \quad \text { Default case } \\ \hat { y } _ { i } ^ { ( 1 ) } &= f _ { 1 } \left( x _ { j } \right) = \hat { y } _ { i } ^ { 0} + f _ { 1 } \left( x _ { i } \right) \\ \hat { y } _ { i } ^ { ( 2 ) } & = f _ { 1 } \left( x _ { i } \right) + f _ { 2 } \left( x _ { 0 } \right) = \hat { y } _ { i } ^ { ( 2 ) } + f _ { 2 } \left( x _ { 2 } \right) \\ & \, \, \, \vdots \\ \hat { y } _ { i } ^ { ( k ) } &= { f _ { 1 } \left( x _ { 0 } \right) + f _ { 2 } \left( x _ { i } \right) + \cdots + f _ { k } \left( x _ { i } \right) } \\& = { \sum _ { j = 1 } ^ { (k-1)} f _ { j } \left( x _ { i } \right) + f _ { k } \left( x _ { i } \right) } = \hat { y } _ { i } ^ { ( k - 1 ) } + f _ { k } \left( x _ { i } \right) \end{aligned}
y ^ i ( 0 ) y ^ i ( 1 ) y ^ i ( 2 ) y ^ i ( k ) = 0 ← Default case = f 1 ( x j ) = y ^ i 0 + f 1 ( x i ) = f 1 ( x i ) + f 2 ( x 0 ) = y ^ i ( 2 ) + f 2 ( x 2 ) ⋮ = f 1 ( x 0 ) + f 2 ( x i ) + ⋯ + f k ( x i ) = j = 1 ∑ ( k − 1 ) f j ( x i ) + f k ( x i ) = y ^ i ( k − 1 ) + f k ( x i )
加入正则化项后的目标函数可以写为:
L
(
ϕ
)
=
∑
i
=
1
n
l
(
y
i
,
y
^
i
)
⏟
Loss Function
+
∑
k
=
1
K
Ω
(
f
k
)
⏟
Penalty/Regularization
\mathcal { L } ( \phi ) =\underbrace { \sum _ { i = 1 } ^ { n } l \left( y _ { i } , \widehat { y } _ { i } \right)}_ \text { Loss Function }+ \underbrace { \sqrt { \sum _ { k = 1 } ^ { K } \Omega \left( f _ { k } \right) } } _ \text{ Penalty/Regularization }
L ( ϕ ) = Loss Function
i = 1 ∑ n l ( y i , y
i ) + Penalty/Regularization
k = 1 ∑ K Ω ( f k )
其中损失函数可以任意选择,正则化项为:
Ω
(
f
k
)
=
γ
T
+
1
2
λ
∑
t
=
1
T
(
w
t
)
2
\Omega \left( f _ { k } \right) = \gamma T + \frac{1}{2} \lambda \sum _ { t = 1 } ^ { T } \left(w _ { t} \right) ^ { 2 }
Ω ( f k ) = γ T + 2 1 λ t = 1 ∑ T ( w t ) 2
这里使用叶子节点的个数和参数的 L2 范数相结合,正则化项的加入是为了帮助使得最终学习到的权重比较平滑而不会过拟合( The additional regularization term helps to smooth the final learnt weights to avoid over-fitting.)针对决策树而言,正则化操作一般是控制叶子的节点个数,树的深度,叶子的节点值。
当然除却正则化项的加入,也引入了放缩(Shrinkage,对每代生成的树赋予权重系数
η
\eta
η
y
^
i
t
=
y
^
i
(
t
−
1
)
+
η
f
t
(
x
i
)
\hat { \boldsymbol { y } } _ { i } ^ { t } = \hat { \boldsymbol { y } } _ { i } ^ { ( t - 1 ) } + \eta \boldsymbol { f } _ { t } \left( \boldsymbol { x } _ { i } \right)
y ^ i t = y ^ i ( t − 1 ) + η f t ( x i )
d
′
d^{\prime}
d ′
d
′
≤
d
d^{\prime} \leq d
d ′ ≤ d
根据叠加式训练的特点目标函数可以改写为:
L
(
k
)
=
∑
i
=
1
n
l
(
y
i
,
y
^
i
(
k
−
1
)
+
f
t
(
x
i
)
)
+
Ω
(
f
t
)
=
∑
i
=
1
n
l
(
y
i
,
y
^
i
(
k
−
1
)
+
f
k
(
x
i
)
)
+
∑
j
=
1
k
−
1
Ω
(
f
j
)
+
Ω
(
f
k
)
\begin{aligned} \mathcal { L } ^ { ( k ) } &= \sum _ { i = 1 } ^ { n } l \left( y _ { i } , \hat { y } _ { i } ^ { ( k - 1 ) } + f _ { t } \left( \mathbf { x } _ { i } \right) \right) + \Omega \left( f _ { t } \right) \\ &= \sum _ { i = 1 } ^ { n } l \left( y _ { i } , \hat { y } _ { i } ^ { ( k - 1 ) } + f _ { k } \left( \mathbf x _ { i } \right)\right) + \sum _ { j = 1 } ^ { k - 1 } \Omega \left( f _ { j } \right) + \Omega \left( f _ { k } \right) \end{aligned}
L ( k ) = i = 1 ∑ n l ( y i , y ^ i ( k − 1 ) + f t ( x i ) ) + Ω ( f t ) = i = 1 ∑ n l ( y i , y ^ i ( k − 1 ) + f k ( x i ) ) + j = 1 ∑ k − 1 Ω ( f j ) + Ω ( f k )
其中由于
∑
j
=
1
k
−
1
Ω
(
f
j
)
\sum _ { j = 1 } ^ { k - 1 } \Omega \left( f _ { j } \right)
∑ j = 1 k − 1 Ω ( f j )
minimize
∑
i
=
1
n
l
(
y
i
,
y
^
i
(
k
−
1
)
+
f
k
(
x
i
)
)
+
Ω
(
f
k
)
\operatorname{minimize } \sum _ { i = 1 } ^ { n } l \left( y _ { i } , \hat { y } _ { i } ^ { ( k - 1 ) } + f _ { k } \left( \mathbf x _ { i } \right)\right) + \Omega \left( f _ { k } \right)
m i n i m i z e i = 1 ∑ n l ( y i , y ^ i ( k − 1 ) + f k ( x i ) ) + Ω ( f k )
知识回顾
泰勒级数
f
(
x
+
Δ
x
)
=
f
(
x
)
+
f
′
(
x
)
(
Δ
x
)
+
f
′
′
(
x
)
2
!
(
Δ
x
)
2
+
⋯
+
f
(
n
)
(
x
)
n
!
(
Δ
x
)
n
+
⋯
=
∑
n
=
0
∞
f
(
n
)
(
x
)
n
!
(
Δ
x
)
n
\begin{aligned} & f(x+\Delta x) \\= &f \left( x \right) + f ^ { \prime } \left( x \right) \left( \Delta x \right) + \frac { f ^ { \prime \prime } \left( x \right) } { 2 ! } \left( \Delta x \right) ^ { 2 } + \cdots + \frac { f ^ { ( n ) } \left( x \right) } { n ! } \left( \Delta x \right) ^ { n } + \cdots \\=&\sum _ { n = 0 } ^ { \infty } \frac { f ^ { ( n ) } \left( x \right) } { n ! } \left( \Delta x \right) ^ { n } \end{aligned}
= = f ( x + Δ x ) f ( x ) + f ′ ( x ) ( Δ x ) + 2 ! f ′ ′ ( x ) ( Δ x ) 2 + ⋯ + n ! f ( n ) ( x ) ( Δ x ) n + ⋯ n = 0 ∑ ∞ n ! f ( n ) ( x ) ( Δ x ) n
为了方便求解,对目标函数进行二阶泰勒展开(将常数项抽取出来),对比与泰勒展开式,这里将常数
y
^
i
(
k
−
1
)
\hat { y } _ { i } ^ { ( k - 1 ) }
y ^ i ( k − 1 )
x
x
x
f
k
(
x
i
)
f _ { k } \left( \mathbf x _ { i } \right)
f k ( x i )
Δ
x
\Delta x
Δ x
f
(
x
+
Δ
x
)
=
l
(
y
i
,
y
^
i
(
k
−
1
)
⏟
x
+
f
k
(
x
i
)
⏟
Δ
x
)
f ( x + \Delta x ) = l \left( y _ { i } , \underbrace{ \hat { y } _ { i } ^ { ( k - 1 ) } }_{x}+ \underbrace{ f _ { k } \left( \mathbf x _ { i } \right)}_{\Delta x} \right)
f ( x + Δ x ) = l ⎝ ⎛ y i , x
y ^ i ( k − 1 ) + Δ x
f k ( x i ) ⎠ ⎞
目标函数的二阶泰勒展开为:
∑
i
=
1
n
l
(
y
i
,
y
^
i
(
k
−
1
)
+
f
k
(
x
i
)
)
+
Ω
(
f
k
)
=
∑
i
=
1
n
[
l
(
y
i
,
y
^
i
(
k
−
1
)
)
+
l
′
(
y
i
,
y
^
i
(
k
−
1
)
)
f
k
(
x
i
)
+
1
2
l
′
′
(
y
i
,
y
^
i
(
k
−
1
)
)
f
k
2
(
x
i
)
]
+
Ω
(
f
k
)
=
∑
i
=
1
n
[
l
(
y
i
,
y
^
i
(
k
−
1
)
)
+
g
i
f
k
(
x
i
)
+
1
2
h
i
f
k
2
(
x
i
)
]
+
Ω
(
f
k
)
⇐
l
′
(
y
i
,
y
^
i
(
k
−
1
)
)
,
l
′
′
(
y
i
,
y
^
i
(
k
−
1
)
)
→
g
i
,
h
i
\begin{aligned} & \sum _ { i = 1 } ^ { n } l \left( y _ { i } , \hat { y } _ { i } ^ { ( k - 1 ) } + f _ { k } \left( \mathbf x _ { i } \right)\right) + \Omega \left( f _ { k } \right) \\ = & \sum _ { i = 1 } ^ { n } \left[ l \left( y _ { i } , \hat { y } _ { i } ^ { ( k - 1 ) } \right) + l^{\prime} \left( y _ { i } , \hat { y } _ { i } ^ { ( k - 1 ) } \right) f _ { k } \left( \mathbf x _ { i } \right) + \frac{1}{2} l^{\prime\prime} \left( y _ { i } , \hat { y } _ { i } ^ { ( k - 1 ) } \right) f^{2} _ { k } \left( \mathbf x _ { i } \right) \right]+ \Omega \left( f _ { k } \right)\\ = & \sum _ { i = 1 } ^ { n } \left[ l \left( y _ { i } , \hat { y } _ { i } ^ { ( k - 1 ) } \right) + g_i f _ { k } \left( \mathbf x _ { i } \right) + \frac{1}{2} h_i f^{2} _ { k } \left( \mathbf x _ { i } \right) \right]+ \Omega \left( f _ { k } \right) \Leftarrow l^{\prime} \left( y _ { i } , \hat { y } _ { i } ^ { ( k - 1 ) } \right),l^{\prime\prime} \left( y _ { i } , \hat { y } _ { i } ^ { ( k - 1 ) } \right) \rightarrow g_i,h_i\\ \end{aligned}
= = i = 1 ∑ n l ( y i , y ^ i ( k − 1 ) + f k ( x i ) ) + Ω ( f k ) i = 1 ∑ n [ l ( y i , y ^ i ( k − 1 ) ) + l ′ ( y i , y ^ i ( k − 1 ) ) f k ( x i ) + 2 1 l ′ ′ ( y i , y ^ i ( k − 1 ) ) f k 2 ( x i ) ] + Ω ( f k ) i = 1 ∑ n [ l ( y i , y ^ i ( k − 1 ) ) + g i f k ( x i ) + 2 1 h i f k 2 ( x i ) ] + Ω ( f k ) ⇐ l ′ ( y i , y ^ i ( k − 1 ) ) , l ′ ′ ( y i , y ^ i ( k − 1 ) ) → g i , h i
那么在训练第 k 个基模型时,
l
(
y
i
,
y
^
i
(
k
−
1
)
)
,
g
i
,
h
i
l \left( y _ { i } , \hat { y } _ { i } ^ { ( k - 1 ) } \right) ,g_i,h_i
l ( y i , y ^ i ( k − 1 ) ) , g i , h i
那么该最优化问题可以进一步改写为:
minimize
∑
i
=
1
n
[
g
i
f
k
(
x
i
)
+
1
2
h
i
f
k
2
(
x
i
)
]
+
Ω
(
f
k
)
\operatorname{minimize } \sum _ { i = 1 } ^ { n } \left[g_i f _ { k } \left( \mathbf x _ { i } \right) + \frac{1}{2} h_i f^{2} _ { k } \left( \mathbf x _ { i } \right) \right]+ \Omega \left( f _ { k } \right)
m i n i m i z e i = 1 ∑ n [ g i f k ( x i ) + 2 1 h i f k 2 ( x i ) ] + Ω ( f k )
那么参数化后的新目标函数可以写为:
∑
i
=
1
n
[
g
i
f
k
(
x
i
)
+
1
2
h
i
f
k
2
(
x
i
)
]
+
Ω
(
f
k
)
=
∑
i
=
1
n
[
g
i
w
q
(
x
i
)
+
1
2
h
i
w
q
(
x
i
)
2
]
+
γ
T
+
1
2
λ
∑
t
=
1
T
(
w
t
)
2
=
∑
t
=
1
T
[
∑
i
∈
I
t
g
i
⏟
constant
G
t
w
t
+
1
2
(
∑
i
∈
I
t
h
i
⏟
constant
H
t
+
λ
)
w
t
2
]
+
γ
T
\begin{aligned} & \sum _ { i = 1 } ^ { n } \left[ g_i f _ { k } \left( \mathbf x _ { i } \right) + \frac{1}{2} h_i f^{2} _ { k } \left( \mathbf x _ { i } \right) \right]+ \Omega \left( f _ { k } \right) \\ = & \sum _ { i = 1 } ^ { n } \left[ g_i w_{q ( \mathbf x_i )} + \frac{1}{2} h_i {w^{2}_{q ( \mathbf x_i )}} \right]+ \gamma T + \frac{1}{2} \lambda \sum _ { t = 1 } ^ { T } \left(w _ { t} \right) ^ { 2 } \\ = & \sum _ { t = 1 } ^ { T } \left[ \underbrace{\sum _ { i \in I _ { t } } g_i }_{\text{constant } G_t } w_{t} + \frac{1}{2} (\underbrace{\sum _ { i \in I _ { t } } h_i }_{\text{constant } H_t } + \lambda ){w^{2}_{t}}\right]+ \gamma T \\ \end{aligned}
= = i = 1 ∑ n [ g i f k ( x i ) + 2 1 h i f k 2 ( x i ) ] + Ω ( f k ) i = 1 ∑ n [ g i w q ( x i ) + 2 1 h i w q ( x i ) 2 ] + γ T + 2 1 λ t = 1 ∑ T ( w t ) 2 t = 1 ∑ T ⎣ ⎢ ⎢ ⎢ ⎢ ⎡ constant G t
i ∈ I t ∑ g i w t + 2 1 ( constant H t
i ∈ I t ∑ h i + λ ) w t 2 ⎦ ⎥ ⎥ ⎥ ⎥ ⎤ + γ T
那么在中括号中,由于
G
t
,
H
t
G_t,H_t
G t , H t
w
t
w_t
w t
知识回顾:
一个典型的二次函数:
y
=
a
x
2
+
b
x
+
c
(
a
≠
0
)
y = a x ^ { 2 } + b x + c \quad ( a \neq 0 )
y = a x 2 + b x + c ( a = 0 )
(
−
b
2
a
,
4
a
c
−
b
2
4
a
)
\left( - \frac { b } { 2 a } , \frac { 4 a c - b ^ { 2 } } { 4 a } \right)
( − 2 a b , 4 a 4 a c − b 2 )
所以当树的结构固定,也就是说
q
(
x
)
q(\mathbf x)
q ( x )
w
t
∗
w^*_t
w t ∗
−
G
t
H
t
+
λ
-\frac{G_t}{H_t + \lambda}
− H t + λ G t
括号中的最佳解(最小值)为:
−
G
t
2
2
(
H
t
+
λ
)
-\frac{G_t^2}{ 2(H_t + \lambda)}
− 2 ( H t + λ ) G t 2
所以当前树结构下的最佳的目标函数值
L
∗
\mathcal { L } ^ *
L ∗
−
1
2
∑
t
=
1
T
G
t
2
H
t
+
λ
+
γ
T
-\frac{1}{2} \sum _ { t = 1 } ^ { T } \frac{G_t^2}{ H_t + \lambda} + \gamma T
− 2 1 t = 1 ∑ T H t + λ G t 2 + γ T
以下图为例计算目标函数函数值:
精确贪心算法表明,对于连续特征,计算上要求枚举所有可能的分割。为了有效地实现这一点,算法必须首先根据特征值对数据进行排序,然后访问排序后的数据,以实现最佳分割点的获取。(因为排序之后数据集的分割会高效很多,可以直接在原内存上直接读取使用)
既然可以计算出最佳的目标值,那么假设当前节点的样本集为
I
=
I
L
∪
I
R
I = I _ { L } \cup I _ { R }
I = I L ∪ I R
I
L
,
I
R
I _ { L } , I _ { R }
I L , I R
L
split
=
1
2
[
G
L
2
H
L
+
λ
+
G
R
2
H
R
+
λ
−
(
G
L
+
G
R
)
2
H
L
+
H
R
+
λ
]
−
γ
\mathcal { L } _\text{split} = \frac { 1 } { 2 } \left[ \frac { G _ { L } ^ { 2 } } { H _ { L + \lambda } } + \frac { G _ { R } ^ { 2 } } { H _ { R } + \lambda } - \frac { \left( G_L + G _ { R } \right) ^ { 2 } } { H _ { L } + H _ { R } + \lambda } \right] - \gamma
L split = 2 1 [ H L + λ G L 2 + H R + λ G R 2 − H L + H R + λ ( G L + G R ) 2 ] − γ
那么精准的贪心分割算法 则是穷举全部的特征,并选取
L
split
\mathcal { L } _\text{split}
L split
Input:
I
,
instance set of current node
Input:
d
, feature dimension
gain
←
0
G
←
∑
i
∈
I
g
i
,
H
←
∑
i
∈
I
h
i
for
k
=
1
to
m
do
G
L
←
0
,
H
L
←
0
for
j
in sorted
(
I
by
x
j
k
)
d
o
G
L
←
G
L
+
g
j
,
H
L
←
H
L
+
h
j
G
R
←
G
−
G
L
,
H
R
←
H
−
H
L
end
Output: Split with max score
\begin{array} { l } \text {Input: } I , \text { instance set of current node } \\ \text {Input: } d \text { , feature dimension } \\ \text {gain } \leftarrow 0 \\ G \leftarrow \sum _ { i \in I } g _ { i } , H \leftarrow \sum _ { i \in I } h _ { i } \\ \text {for } k = 1 \text { to } m \text { do } \\ \qquad \begin{array} { l } G _ { L } \leftarrow 0 , H _ { L } \leftarrow 0 \\ \text {for } j \text { in sorted } \left( I \text{ by }\mathbf { x } _ { j k } \right) \mathbf { d o } \\ \qquad G _ { L } \leftarrow G _ { L } + g _ { j } , H _ { L } \leftarrow H _ { L } + h _ { j } \\ \qquad G _ { R } \leftarrow G - G _ { L } , H _ { R } \leftarrow H - H _ { L } \\ \text {end } \end{array} \\ \text{Output: Split with max score} \end{array}
Input: I , instance set of current node Input: d , feature dimension gain ← 0 G ← ∑ i ∈ I g i , H ← ∑ i ∈ I h i for k = 1 to m do G L ← 0 , H L ← 0 for j in sorted ( I by x j k ) d o G L ← G L + g j , H L ← H L + h j G R ← G − G L , H R ← H − H L end Output: Split with max score
为了提高效率,现在只针对候选集进行最佳分割点的获取,而不是穷举全部的样本获取最佳分割点,这就是本文中提出的估计分割算法 。具体实现如下:
for
k
=
1
to
m
do
Propose
S
k
=
{
s
k
1
,
s
k
2
,
⋯
s
k
l
}
by percentiles on feature
k
.
Proposal can be done per tree (global), or per split(local).
end
for
k
=
1
to
m
do
G
k
v
←
=
∑
j
∈
{
j
∣
s
k
,
v
≥
x
j
k
>
s
k
,
v
−
1
}
g
j
H
k
v
←
=
∑
j
∈
{
j
∣
s
k
,
v
≥
x
j
k
>
s
k
,
v
−
1
}
h
j
end
// Follow same step as in previous section to find max score only among proposed splits.
for
k
=
1
to
m
do
G
L
←
0
,
H
L
←
0
for
v
=
1
to
l
do
G
L
←
G
L
+
G
k
v
,
H
L
←
H
L
+
H
k
v
G
R
←
G
−
G
L
,
H
R
←
H
−
H
L
end
\begin{array} { l } \text { for } k = 1 \text { to } m \text { do } \\ \qquad \text { Propose } S _ { k } = \left\{ s _ { k 1 } , s _ { k 2 } , \cdots s _ { k l } \right\} \text { by percentiles on feature } k \text { . } \\ \qquad \text { Proposal can be done per tree (global), or per split(local). } \\ \text { end } \\ \text { for } k = 1 \text { to } m \text { do } \\ \qquad \begin{array} { l } G _ { k v } \leftarrow = \sum _ { j \in \left\{ j | s _ { k , v } \geq \mathbf { x } _ { j k } > s _ { k , v - 1 } \right\} } g _ { j } \\ H _ { k v } \leftarrow = \sum _ { j \in \left\{ j | s _ { k , v } \geq \mathbf { x } _ { j k } > s _ { k , v - 1 } \right\} } h _ { j } \end{array} \\ \text{ end} \\ \text{ // Follow same step as in previous section to find max score only among proposed splits.}\\ \text {for } k = 1 \text { to } m \text { do }\\ \qquad \begin{array} { l } G _ { L } \leftarrow 0 , H _ { L } \leftarrow 0 \\ \text { for } v = 1 \text { to } l \text { do } \\ \qquad G _ { L } \leftarrow G _ { L } +G _ { k v } , H _ { L } \leftarrow H _ { L } + H _ { k v } \\ \qquad G _ { R } \leftarrow G - G _ { L } , H _ { R } \leftarrow H - H _ { L } \\ \text {end } \end{array} \end{array}
for k = 1 to m do Propose S k = { s k 1 , s k 2 , ⋯ s k l } by percentiles on feature k . Proposal can be done per tree (global), or per split(local). end for k = 1 to m do G k v ← = ∑ j ∈ { j ∣ s k , v ≥ x j k > s k , v − 1 } g j H k v ← = ∑ j ∈ { j ∣ s k , v ≥ x j k > s k , v − 1 } h j end // Follow same step as in previous section to find max score only among proposed splits. for k = 1 to m do G L ← 0 , H L ← 0 for v = 1 to l do G L ← G L + G k v , H L ← H L + H k v G R ← G − G L , H R ← H − H L end
简单的说,就是根据特征
k
k
k
l
l
l
{
s
k
1
,
s
k
2
,
⋯
s
k
l
}
\left\{ s _ { k 1 } , s _ { k 2 } , \cdots s _ { k l } \right\}
{ s k 1 , s k 2 , ⋯ s k l }
G
k
v
,
H
k
v
G _ { k v },H _ { k v }
G k v , H k v
G
k
v
,
H
k
v
G _ { k v },H _ { k v }
G k v , H k v
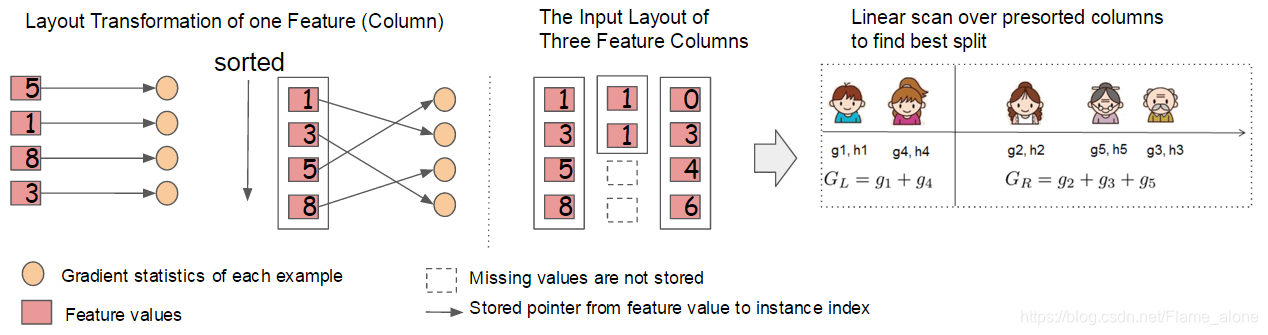
同时为了保证均匀分布,常常使用加权分位数来选择分割点以改善此需求。首先看一下获取方法:
令
D
k
=
{
(
x
1
k
,
h
1
)
,
(
x
2
k
,
h
2
)
⋯
(
x
n
k
,
h
n
)
}
\mathcal { D } _ { k } = \left\{ \left( \mathbf x _ { 1 k } , h _ { 1 } \right) , \left(\mathbf x _ { 2 k } , h _ { 2 } \right) \cdots \left(\mathbf x _ { n k } , h _ { n } \right) \right\}
D k = { ( x 1 k , h 1 ) , ( x 2 k , h 2 ) ⋯ ( x n k , h n ) }
r
k
:
R
→
[
0
,
+
∞
)
r _ { k } : \mathbb { R } \rightarrow [ 0 , + \infty )
r k : R → [ 0 , + ∞ )
r
k
(
z
)
=
1
∑
(
x
,
h
)
∈
D
k
h
∑
(
x
,
h
)
∈
D
k
,
x
<
z
h
r _ { k } ( z ) = \frac { 1 } { \sum _ { ( x , h ) \in \mathcal { D } _ { k } } h } \sum _ { ( x , h ) \in \mathcal { D } _ { k } , x < z } h
r k ( z ) = ∑ ( x , h ) ∈ D k h 1 ( x , h ) ∈ D k , x < z ∑ h
这代表了第 k 个特征值小于
z
z
z
{
s
k
1
,
s
k
2
,
⋯
s
k
l
}
\left\{ s _ { k 1 } , s _ { k 2 } , \cdots s _ { k l } \right\}
{ s k 1 , s k 2 , ⋯ s k l }
∣
r
k
(
s
k
,
j
)
−
r
k
(
s
k
,
j
+
1
)
∣
<
ϵ
,
s
k
1
=
min
i
x
i
k
,
s
k
l
=
max
i
x
i
k
\left| r _ { k } \left( s _ { k , j } \right) - r _ { k } \left( s _ { k , j + 1 } \right) \right| < \epsilon , \quad s _ { k 1 } = \min _ { i } \mathbf { x } _ { i k } , s _ { k l } = \max _ { i } \mathbf { x } _ { i k }
∣ r k ( s k , j ) − r k ( s k , j + 1 ) ∣ < ϵ , s k 1 = i min x i k , s k l = i max x i k
其中
ϵ
\epsilon
ϵ
1
/
ϵ
1/\epsilon
1 / ϵ
为什么使用
h
h
h
L
~
(
k
)
=
∑
i
=
1
n
[
g
i
f
k
(
x
i
)
+
1
2
h
i
f
k
2
(
x
i
)
]
+
Ω
(
f
k
)
\tilde { \mathcal { L } } ^ { ( k ) } = \sum _ { i = 1 } ^ { n } \left[ g _ { i } f _ { k } \left( \mathbf { x } _ { i } \right) + \frac { 1 } { 2 } h _ { i } f _ { k } ^ { 2 } \left( \mathbf { x } _ { i } \right) \right] + \Omega \left( f _ { k } \right)
L ~ ( k ) = i = 1 ∑ n [ g i f k ( x i ) + 2 1 h i f k 2 ( x i ) ] + Ω ( f k )
即:
L
~
(
k
)
=
∑
i
=
1
n
1
2
h
i
(
f
t
(
x
i
)
−
g
i
/
h
i
)
2
+
Ω
(
f
t
)
+
constant
\tilde { \mathcal { L } } ^ { ( k ) } = \sum _ { i = 1 } ^ { n } \frac { 1 } { 2 } h _ { i } \left( f _ { t } \left( \mathbf { x } _ { i } \right) - g _ { i } / h _ { i } \right) ^ { 2 } + \Omega \left( f _ { t } \right) + \text { constant }
L ~ ( k ) = i = 1 ∑ n 2 1 h i ( f t ( x i ) − g i / h i ) 2 + Ω ( f t ) + constant
该公式中由于
g
i
,
h
i
g _ { i } , h _ { i }
g i , h i
f
t
(
x
i
)
f _ { t } \left( \mathbf { x } _ { i } \right)
f t ( x i )
g
i
/
h
i
g _ { i } / h _ { i }
g i / h i
h
i
h _ { i }
h i
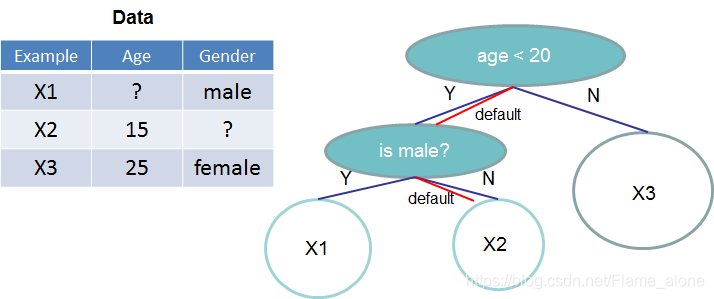
这里处理缺失值使用的方法是训练出默认的分支是左子树还是右子树。
具体的算法实现如下:
Input:
I
,
instance set of current node
Input:
I
k
=
{
i
∈
I
∣
x
i
k
≠
missing
}
Input:
d
,
feature dimension
Also applies to the approximate setting, only collect statistics of non-missing entries into buckets
gain
←
0
G
←
∑
i
∈
I
,
g
i
,
H
←
∑
i
∈
I
h
i
for
k
=
1
to
m
do
// enumerate missing value goto right
G
L
←
0
,
H
L
←
0
for
j
in sorted
(
I
k
,
ascent order
b
y
x
j
k
)
do
G
L
←
G
L
+
g
j
,
H
L
←
H
L
+
h
j
G
R
←
G
−
G
L
,
H
R
←
H
−
H
L
score
←
max
(
score
,
G
L
2
H
L
+
λ
+
G
R
2
H
R
+
λ
−
G
2
H
+
λ
)
end
// enumerate missing value goto left
G
R
←
0
,
H
R
←
0
for
j
in sorted
(
I
k
,
descent order
b
y
x
j
k
)
do
G
R
←
G
R
+
g
j
,
H
R
←
H
R
+
h
j
G
L
←
G
−
G
R
,
H
L
←
H
−
H
R
score
←
max
(
score
,
G
L
2
H
L
+
λ
+
G
R
2
H
R
+
λ
−
G
2
H
+
λ
)
end
Output split and default directions with max gain
\begin{array} { l } \text {Input: } I , \text { instance set of current node } \\ \text {Input: } I _ { k } = \left\{ i \in I | x _ { i k } \neq \text { missing } \right\} \\ \text {Input: } d , \text { feature dimension } \\ \text {Also applies to the approximate setting, only collect statistics of non-missing entries into buckets } \\ \operatorname { gain } \leftarrow 0 \\ G \leftarrow \sum _ { i \in I } , g _ { i } , H \leftarrow \sum _ { i \in I } h _ { i } \\ \text {for } k = 1 \text { to } m \text { do } \\ \qquad \begin{array} { l } \text {// enumerate missing value goto right } \\ G _ { L } \leftarrow 0 , H _ { L } \leftarrow 0 \\ \text {for } j \text { in sorted } \left( I _ { k } , \text { ascent order } b y \mathbf { x } _ { j k } \right) \text { do } \\ \qquad G _ { L } \leftarrow G _ { L } + g _ { j } , H _ { L } \leftarrow H _ { L } + h _ { j } \\ \qquad G _ { R } \leftarrow G - G _ { L } , H _ { R } \leftarrow H - H _ { L } \\ \qquad \text {score } \leftarrow \max \left( \text { score } , \frac { G _ { L } ^ { 2 } } { H _ { L } + \lambda } + \frac { G _ { R } ^ { 2 } } { H _ { R } + \lambda } - \frac { G ^ { 2 } } { H + \lambda } \right) \\ \text {end } \\ \text {// enumerate missing value goto left } \\ G _ { R } \leftarrow 0 , H _ { R } \leftarrow 0 \\ \text {for } j \text { in sorted } \left( I _ { k } , \text { descent order } b y \mathbf { x } _ { j k } \right) \text { do } \\ \qquad G _ { R } \leftarrow G _ { R } + g _ { j } , H _ { R } \leftarrow H _ { R } + h _ { j } \\ \qquad G _ { L } \leftarrow G - G _ { R } , H _ { L } \leftarrow H - H _ { R } \\ \qquad \text {score } \leftarrow \max \left( \text { score } , \frac { G _ { L } ^ { 2 } } { H _ { L } + \lambda } + \frac { G _ { R } ^ { 2 } } { H _ { R } + \lambda } - \frac { G ^ { 2 } } { H + \lambda } \right) \\\text {end } \\ \text {Output split and default directions with max gain } \end{array} \end{array}
Input: I , instance set of current node Input: I k = { i ∈ I ∣ x i k = missing } Input: d , feature dimension Also applies to the approximate setting, only collect statistics of non-missing entries into buckets g a i n ← 0 G ← ∑ i ∈ I , g i , H ← ∑ i ∈ I h i for k = 1 to m do // enumerate missing value goto right G L ← 0 , H L ← 0 for j in sorted ( I k , ascent order b y x j k ) do G L ← G L + g j , H L ← H L + h j G R ← G − G L , H R ← H − H L score ← max ( score , H L + λ G L 2 + H R + λ G R 2 − H + λ G 2 ) end // enumerate missing value goto left G R ← 0 , H R ← 0 for j in sorted ( I k , descent order b y x j k ) do G R ← G R + g j , H R ← H R + h j G L ← G − G R , H L ← H − H R score ← max ( score , H L + λ G L 2 + H R + λ G R 2 − H + λ G 2 ) end Output split and default directions with max gain
基本的实现方式就是将不缺失该特征的样本,只向左子树样本集(或右子树样本集)添加,那么缺失该特征的样本将会直接分配在右子树样本集(或左子树样本集),并且穷举全部可能,这样便可以求出哪种默认操作(向左子树样本集还是右子树样本集添加)更好一些。
树学习最耗时的部分是将数据排序。为了降低排序的成本,建议将数据存储在内存单元中,作者将其称为块(block)。每个块中的数据以压缩列(compressed column,CSC)格式存储,每列按相应的特征值排序。这个输入数据布局只需要在训练之前计算一次,并且可以在以后的迭代中重用。下图便是这种块实现和使用流程:
可见其在存储特征值的同时也将特征值指向的梯度(或二阶梯度)值进行了存储。这使得并行计算全部特征的损失函数值成为了可能。
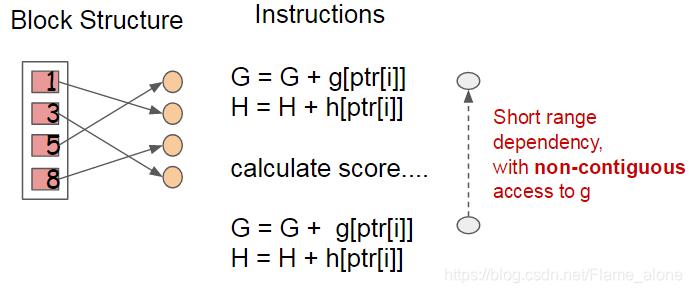
使用Block结构的一个缺点是取梯度(或二阶梯度)值的时候,是通过索引来获取的,而这些梯度的获取顺序是按照特征的大小顺序的。虽然时间复杂度为
O
(
1
)
O(1)
O ( 1 )
因此,在精准贪心算法中, 提出使用缓存预取算法。具体来说,对每个线程分配一个连续的缓存,按照特征值的排列顺序,以小批量的方式依次读取梯度信息并存入该连续缓存中,这样只需要一次非连续读取。该方式在训练样本数大的时候可以有效减小运算开销。
参考论文:XGBoost: A Scalable Tree Boosting System