title: 平衡车PID分析
date: 2020-06-04 20:46:21
tags:
categories: STM32学习记录
初步认识PID
对于我这个非控制院的学生来说,这方面的理论知识本来就不足,加上以前基本上干的都是点灯的事,没有涉及控制算法的编写,所以写PID的程序是很懵逼的,因此首先要明白究竟什么是PID。
首先,要明白什么情况下要用到PID控制:用户设定一个期望值,我们希望控制一个受控物体,通常是一个物理量,能够尽可能快的达到一个值,并且能够稳定住。那么这个控制器就需要一个或多个输入值,一个是用户的期望值,其他则是测量物理量的传感器的值。
P:proportion,比例,就是用户期望值,与传感器返回值的差值,偏差。
I:integral,积分,记录了从某一时刻开始,所有的偏差的累积。
D:derivative,微分,是偏差的偏差,相当于偏差的导数,偏差变化的速率。
在实际的运用中,我们不一定要用这里面的所有,但是一定是基于P的控制,积分和微分都是在数据上对偏差进行处理,可以有PI控制,可以有PD控制,也存在PID控制。
结合平衡车,深度理解PID
比例控制:把握当下
那么,究竟什么时候用PI,什么时候用PD呢?这就要从原理说起。
比如我做一个平衡车,希望通过一种控制算法来实现平衡,最容易想到的方法就是比例控制:
1、我希望平衡车稳定达到平衡状态(用户期望值)是平衡车的机械平衡角度(目标物理量),以及受控物体的角度,MPU6050传感器的DMP度数,
2、两个数据的偏差,作为输入控制器的值,在控制器中乘上一个增益,经过输出限幅,然后输出给执行器件:电机,
3、电机的工作状态,反过来又会影响平衡车的角度,角度又会被传感器收集,重新计算偏差,输入控制器。
于是,这样一个偏差控制器就形成了一个闭环。
理论上,一个理想的P控制器,只能使受控物理量无限接近目标值,因为当偏差逐渐减小,趋于零时,控制器的输入趋于零,那么无论有多大增益,输出也会趋于零,这样就会停在一个固定值。
但是在实际中,我们要考虑多种因素,第一,输出趋于零,小车可不会静止在一个角度,而是迅速倒下,第二,实际上第一种情况也是不存在的,因为从控制器输出PWM给电机,到平衡车角度改变,本身就是有很长时间的延时,会有惯性,这种控制影响总是延后造成。因此,真正的情况是,平衡车的角度已经很接近机械零度了,电机的输出也已经快要停止了,然而,平衡车却有一个角速度,方向正是最初纠正平衡车的方向,这样,就算停掉电机,小车依然会越过平衡点,越过平衡点之后,偏差为负数,但是数值却很小,偏差经过控制器增益、限幅、输出给电机,电机却无法产生足够及时纠正偏离的转动,于是到小车反向倒下足够大的角度时,电机输出的转速才足够纠正,最终的结果就是,小车开始出现大幅度的震荡,根本无法平衡。
比例+微分控制:预测未来,控制平衡
如何改善这种震荡呢,经过前面的分析,我们知道,出现震荡的根本原因是机械系统的惯性,导致输出对受控物体的影响总是延后的。问题就出在,当角度接近机械零度时,我们的P控制器不工作了,控制器认为完成了任务,然而控制器忽略了一种对下一个时刻的预测,那么这个对下一个时刻的预测,指的就是角度偏差的导数,角度变化的速率,就是角速度。
有了这个认识,我们继续分析,角度偏差接近零度,但是系统存在角速度,那么下一刻就一定会有角度偏差,并且方向与角速度方向相反,通过数据,获取到角速度,就能够通过角速度,来修正这种状态,有预见性的输出给电机,让电机在下一个时刻就开始纠正偏差的倾向。
于是,我们加入D控制,微分项,相当于一个阻尼力:在偏差项P占主导时,微分项D的影响相对来说非常小,然而当偏差趋于零时,微分项的作用就是,减慢受控物理量的变化速率。
这样做的核心原理就是,既然控制存在滞后,那我就提前控制,就达到了抑制震荡,促进系统在平衡点稳定的目的。
比例+积分控制:总结过去,控制位置
上面的PD控制系统,基本上可以让平衡小车处于一个短期稳定平衡的状态,但是肯定不能长时间平衡,原因呢,要从具体的平衡控制结构来分析。
我们的传感器是单一的MPU6050,通过DMP库,输出的是角度以及角速度信号,而我们控制的是电机,也就是说,我们不考虑电机的感受,只要求平衡车的角度能够保持在机械零度,那么一旦平衡车收到扰动,或者控制闭环的任何一个环节,出现了微小的干扰,平衡车就会向一个方向加速,角度还是平衡的,但是平移的速度却没有限制,这样一旦驱动电机的PWM信号达到了限幅的数值,电机不再加速旋转,小车的执行器件就失去了执行能力,就会向这个方向倒下。
经过分析,我们需要再参考一个物理量,就是编码器的读数,既然使用编码电机,编码器的读数就需要纳入测量范围。然后问题又来了,如何处理读到的编码器数据呢?我们设置定时器模式为AB相编码器模式,那么每次读编码器,得到的是0-65535这个区间的一个值,电机转动,编码器的读数就会变化,我们希望小车在一个位置静止,就需要在平衡PD控制的基础上,加上一个位置控制,两种信号经过处理,输入控制器,控制器经过融合,输出给电机。
现在的问题是,位置控制使用什么样的方法?显然,位置控制并不像角度的平衡控制,电机转动就能够较快地达到效果,因此,我们需要一段时间,一步一步地接近我们设定的位置,也就是说,需要使用速度控制,对速度的一步步累积,使小车的位置(编码器的读数)逐渐趋于某一个值,这就要用到PI算法,即比例+积分控制来实现速度控制。
继续分析,我们假设用户输入的目标值是放下小车时刻,编码器的读数就是小车(车轮)的速度,这里可能就有点问题了,明明编码器的读数是脉冲信号,是位置啊,为什么说是速度呢?这就涉及到对编码器的数据处理,我们每隔一段时间,我们读取CNT寄存器,然后软件清零,意味着我们每次读取的数据,都是一段时间的计数值变化,不就是速度吗。弄清楚这个,我们开始分析怎么实现比例+积分的控制。
每隔一定周期,我们获取一次编码器的速度,然后与用户期望的速度,得到一个偏差,这个偏差就是P(比例),很显然偏差越大,我们需要的回复力就越大。到这里,我们吧前面的平衡PD控制,加上速度P控制,经过调整三个增益的大小以及比例,在控制器中对信号进行简单的叠加(叠加式PID,另外还有串联式,这里没有用到),就能够完美的实现小车的长时间稳定了。完美的状态是,推动小车,小车会前进一段距离,然后重新进入平衡。
那么,我们如果想要实现小车能够记住自己的位置,在受到外部干扰后自动回复到初始位置,该如何操作呢?注意,这里我提到了记住这么一个概念,就不难想到,这种控制,需要历史的全部速度信息,对离散的速度进行积分,得到从初始时刻,到当前时刻的位置信息。为了做到这一点,我们需要引入速度PI控制,比例+积分。具体的操作就是:从开始时刻,固定周期将速度偏差进行累加(具体可能需要滤波,这里讲解原理,略去),这个累加的值,就是偏离的距离,把这个距离,经过一个增益,也叠加进前面的3个参数,一共4个参数,共同作为输入,经过控制器输出给电机,这样就实现了在一个位置的PD+PI控制算法。
通过代码,分析PID的各个组成部分
比例+微分:直立环
比例输入:期望角度与当前角度的偏差
期望角度,就是我们通过提前测量,得到的平衡车直立时的6050的读数,因为传感器的安装是存在误差的,并且小车的质心投影也不一定在两轮中心连线上,因此有必要提前测量机械角度中值,作为期望角度。
#define ZHONGZHI -4.5 //平衡机械中值,与MPU6050的安装位置有关
然后我们通过DMP的方式,读取到小车当前的角度:
void Read_DMP(void)
{
unsigned long sensor_timestamp;
unsigned char more;
long quat[4];
dmp_read_fifo(gyro, accel, quat, &sensor_timestamp, &sensors, &more);
if (sensors & INV_WXYZ_QUAT )
{
q0=quat[0] / q30;
q1=quat[1] / q30;
q2=quat[2] / q30;
q3=quat[3] / q30;
Pitch = asin(-2 * q1 * q3 + 2 * q0* q2)* 57.3;
Roll= atan2(2 * q2 * q3 + 2 * q0 * q1, -2 * q1 * q1 - 2 * q2* q2 + 1)* 57.3; // roll
}
}
在这里,我们设定一个全局变量Roll,通过四元数算出的值就是小车的滚转角,与中值做差,就是角度的偏差:
Read_DMP(); //===读取加速度、角速度、倾角
Angle_Balance=-Roll; //===更新平衡倾角
Bias=Angle-ZHONGZHI; //===求出平衡的角度偏差
微分输入:两个周期得到的角度偏差的差值
Gyro_Balance=-gyro[0]; //===更新滚转角速度
这里的gyro是一个DMP库自带的一个数组,存储了xyz三个轴的角速度AD值,传感器能读出角速度,我们就不需要再去自己计算微分了。
融合:比例+微分信号
balance=Balance_Kp*Bias+Balance_Kd*Gyro;
这样就得到了直立PD控制所需的PWM信号,当然,现在还没有输出,因为后面需要融合速度PI控制,之后再进行输出。
比例+积分:速度环
比例输入:期望速度与当前速度的偏差
这里先介绍最简单的,期望速度为0。我们配置定时器为编码器模式,不分频,向上计数,0-65535,CH1+CH2四倍频。这样,CNT计数寄存器中的值,就记录的小车的位置,我们每隔10ms读取一次寄存器的值,然后清零,具体的函数:
int Read_Encoder(u8 TIMX)
{
int Encoder_TIM;
switch(TIMX)
{
case 2: Encoder_TIM= (short)TIM2 -> CNT; TIM2 -> CNT=0;break;
case 4: Encoder_TIM= (short)TIM4 -> CNT; TIM4 -> CNT=0;break;
default: Encoder_TIM=0;
}
return Encoder_TIM;
}
这里一定要注意,并且理解这个强制类型转换的作用:
我们设定编码器模式,向上计数,那么电机正转,T计数器从0增加,增加到65535时,就会归零,再增加,这样循环。那么一旦反转,就会从0递减到65535,这样的速度偏差就是65535,这显然不是我们想看到的。但是从底层原理解释,本来读寄存器,都是我们经过强转类型,把寄存器赋值给一个我们规定类型的变量。那这里我们把这个变量转成有符号的不就有了正负?于是,强转成short类型,这个计数的范围就变成了-32768到+32767循环计数,这样,偏差就有了正负之分。
Encoder_Left = Read_Encoder(2); //===读取编码器1的值
Encoder_Right = Read_Encoder(4); //===读取编码器2的值
由于是周期性读取编码器,那么这个读取的值,就是小车的当前速度。
积分输入:两个周期得到的比例的累积
static float Velocity,Encoder_Least,Encoder,Movement;
这里定义了几个static变量,可以保存上一次的变化值,是积分实现的编程基础。
Encoder_Least =(encoder_left+encoder_right)-0;
这一句,左轮速度加右轮速度,就得到了小车的几何中心的速度,可以代表小车的速度。
Encoder *= 0.7;
Encoder += Encoder_Least*0.3;
这是一个简单的低通滤波器,作用是减缓速度的变化。因为我们只是将速度环和直立环做了一个简单的线性叠加,而直立是一切的基础,我们不希望速度环对直立环造成过大的干扰,所以在这里需要做一个滤波的处理。
Encoder_Integral += Encoder;
这一步,就做了一个积分的操作,每执行一次,这个变量都会累加之前的速度偏差,得到速度的积分:位移。
融合:比例+积分信号
Velocity=Encoder*Velocity_Kp+Encoder_Integral*Velocity_Ki;
这样就得到了速度PI控制所需的电机PWM信号,下一步就是融合两个闭环控制。
最终融合:直立PD+速度PI
Balance_Pwm = Get_balance_PWM(Angle_Balance,Gyro_Balance); //===平衡PD控制
Velocity_Pwm = Get_velocity_PWM(Encoder_Left,Encoder_Right); //===速度环PI控制
Moto1 = Balance_Pwm - Velocity_Pwm; //===计算左轮电机最终PWM
Moto2 = Balance_Pwm - Velocity_Pwm; //===计算右轮电机最终PWM
Xianfu_Pwm(); //===PWM限幅
Set_Pwm(Moto1,Moto2); //===赋值给PWM寄存器
这一步,就实现了控制器的信号输出,设定驱动电机工作的PWM信号,调节Kp(balance),Kd(balance),Kp(velocity),Ki(velocity),四个参数,就可以实现小车平衡在某一个位置了。
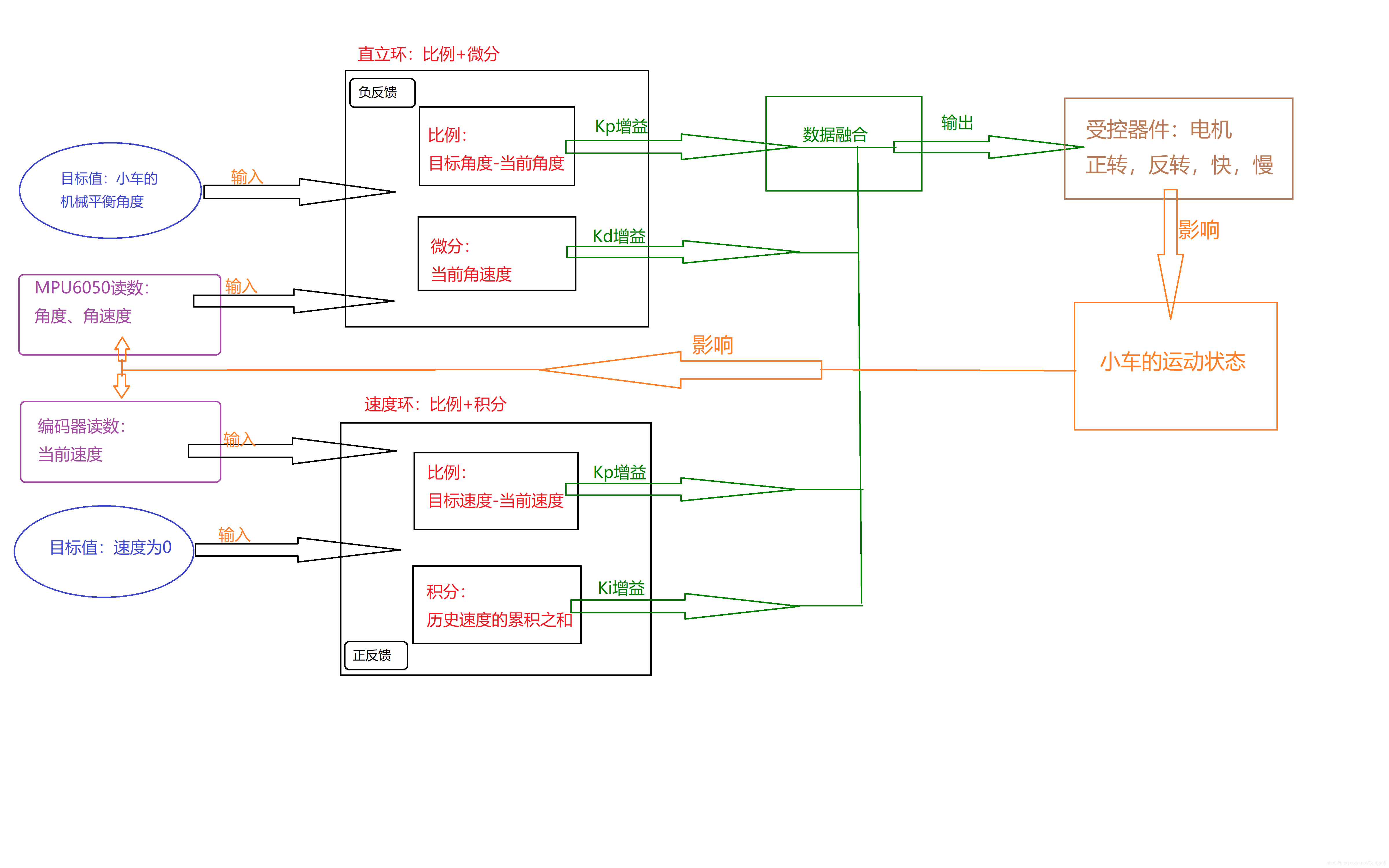
总结:PID总体框图