一、说明
本文学习资源来自Github开源项目:
https://github.com/breadbread1984/YOLOv3-tf2.0
由于条件限制,本文部分内容我没有实际运行测试。
本文摘选注释部分功能代码,完整项目代码可到开源地址获取。
二、代码实现
1. 训练COCO数据集
下载COCO数据集download_dataset.py
#!/usr/bin/python3
import tensorflow_datasets as tfds;
def main():
# load dataset
coco2014_builder = tfds.builder("coco");
coco2014_builder.download_and_prepare();
# try to load the dataset once
coco2014_train = tfds.load(name = "coco", split = tfds.Split.TRAIN, download = False);
coco2014_test = tfds.load(name = "coco", split = tfds.Split.TEST, download = False);
if __name__ == "__main__":
assert tf.executing_eagerly();
main();
数据集37.57GiB比较大,在google colab上超出了磁盘使用量,不适合在colab上复现。
tf eager训练coco数据集 train_eager.py
#!/usr/bin/python3
import os;
import numpy as np;
import cv2;
import tensorflow as tf;
import tensorflow_datasets as tfds;
from YOLOv3 import YOLOv3, Loss;
from Predictor import Predictor;
from preprocess import map_function;
os.environ['TF_ENABLE_AUTO_MIXED_PRECISION'] = '1';
#os.environ['TF_CPP_MIN_VLOG_LEVEL'] = '3';
#os.environ['CUDA_VISIBLE_DEVICES'] = '';
batch_size = 8; # images of different sizes can't be stack into a batch
def main():
# yolov3 model 导入yolov3模型
yolov3 = YOLOv3((416,416,3), 80);
yolov3_loss = Loss((416,416,3), 80);
# load downloaded dataset 加载数据集
trainset = tfds.load(name = "coco", split = tfds.Split.TRAIN, download = False);
trainset = trainset.map(map_function).repeat(100).shuffle(batch_size).batch(batch_size).prefetch(tf.data.experimental.AUTOTUNE);
validationset = tfds.load(name = "coco", split = tfds.Split.VALIDATION, download = False);
validationset_iter = validationset.map(map_function).repeat(100).shuffle(batch_size).batch(batch_size).prefetch(tf.data.experimental.AUTOTUNE).__iter__();
testset = tfds.load(name = "coco", split = tfds.Split.TEST, download = False); # without label
testset = testset.repeat(100).prefetch(tf.data.experimental.AUTOTUNE);
testset_iter = testset.__iter__();
# restore from existing checkpoint 加载checkpoint
optimizer = tf.keras.optimizers.Adam(1e-4);
if False == os.path.exists('checkpoints'): os.mkdir('checkpoints');
checkpoint = tf.train.Checkpoint(model = yolov3, optimizer = optimizer, optimizer_step = optimizer.iterations);
checkpoint.restore(tf.train.latest_checkpoint('checkpoints'));
# tensorboard summary
log = tf.summary.create_file_writer('checkpoints');
# train model 训练模型
print("training...");
train_loss = tf.keras.metrics.Mean(name = 'train loss', dtype = tf.float32);
validation_loss = tf.keras.metrics.Mean(name = 'validation loss', dtype = tf.float32);
for images, labels in trainset:
with tf.GradientTape() as tape:
outputs = yolov3(images);
loss = yolov3_loss([*outputs, *labels]);
# check whether the loss numberic is correct
try:
loss_check = tf.debugging.check_numerics(loss, 'the loss is not correct! cancel train_loss update!');
with tf.control_dependencies([loss_check]):
train_loss.update_state(loss);
print('Step #%d Loss: %.6f' % (optimizer.iterations, loss));
except BaseException as e:
print(e.message);
# write log
if tf.equal(optimizer.iterations % 10, 0):
with log.as_default():
tf.summary.scalar('train loss',train_loss.result(), step = optimizer.iterations);
train_loss.reset_states();
grads = tape.gradient(loss, yolov3.trainable_variables);
# check whether the grad numerics is correct
try:
grads_check = [tf.debugging.check_numerics(grad, 'the grad is not correct! cancel gradient apply!') for grad in grads];
with tf.control_dependencies(grads_check):
optimizer.apply_gradients(zip(grads, yolov3.trainable_variables));
except BaseException as e:
print(e.message);
# save model
if tf.equal(optimizer.iterations % 2000, 0):
# save checkpoint every 1000 steps
checkpoint.save(os.path.join('checkpoints','ckpt'));
yolov3.save('yolov3.h5');
# eval on testset 测试集
if tf.equal(optimizer.iterations % 100, 0):
# validate with latest model
print("validating on validation set...");
for i in range(10):
images, labels = next(validationset_iter);
outputs = yolov3(images);
loss = yolov3_loss([*outputs, *labels]);
# NOTE: validation loss is not important, numeric validity is not checked
validation_loss.update_state(loss);
with log.as_default():
tf.summary.scalar('validation loss', validation_loss.result(), step = optimizer.iterations);
validation_loss.reset_states();
# evaluate every 1000 steps
print("testing on test set...");
features = next(testset_iter);
img = features["image"].numpy().astype('uint8');
predictor = Predictor(yolov3 = yolov3);
boundings = predictor.predict(img);
color_map = dict();
for bounding in boundings:
if bounding[5].numpy().astype('int32') in color_map:
clr = color_map[bounding[5].numpy().astype('int32')];
else:
color_map[bounding[5].numpy().astype('int32')] = tuple(np.random.randint(low=0, high=256,size=(3,)).tolist());
clr = color_map[bounding[5].numpy().astype('int32')];
cv2.rectangle(img, tuple(bounding[0:2].numpy().astype('int32')), tuple(bounding[2:4].numpy().astype('int32')), clr, 5);
img = tf.expand_dims(img, axis = 0);
with log.as_default():
tf.summary.image('detect', img, step = optimizer.iterations);
yolov3.save('yolov3.h5'); # 保存模型
if __name__ == "__main__":
assert tf.executing_eagerly();
main();
keras训练数据集 train_keras.py
#!/usr/bin/python3
import os;
import numpy as np;
import tensorflow as tf;
import tensorflow_datasets as tfds;
from YOLOv3 import YOLOv3, Loss;
from preprocess import map_function;
os.environ['TF_ENABLE_AUTO_MIXED_PRECISION'] = '1';
#os.environ['TF_CPP_MIN_VLOG_LEVEL'] = '3';
#os.environ['CUDA_VISIBLE_DEVICES'] = '';
batch_size = 8; # images of different sizes can't be stack into a batch
def main():
# yolov3 model
yolov3 = YOLOv3((416,416,3,), 80);
@tf.function
def loss(outputs, labels):
return Loss((416,416,3,),80)([outputs[0], outputs[1], outputs[2], labels[0], labels[1], labels[2]]);
yolov3.compile(optimizer = tf.keras.optimizers.Adam(1e-4), loss = loss);
# load downloaded dataset
trainset = tfds.load(name = "coco2014", split = tfds.Split.TRAIN, download = False);
trainset = trainset.map(map_function).shuffle(batch_size).batch(batch_size).prefetch(tf.data.experimental.AUTOTUNE);
validationset = tfds.load(name = "coco2014", split = tfds.Split.VALIDATION, download = False);
validationset = validationset.map(map_function).shuffle(batch_size).batch(batch_size).prefetch(tf.data.experimental.AUTOTUNE);
yolov3.fit(trainset, epochs = 100, validation_data = validationset);
yolov3.save('yolov3.h5');
if __name__ == "__main__":
assert tf.executing_eagerly();
main();
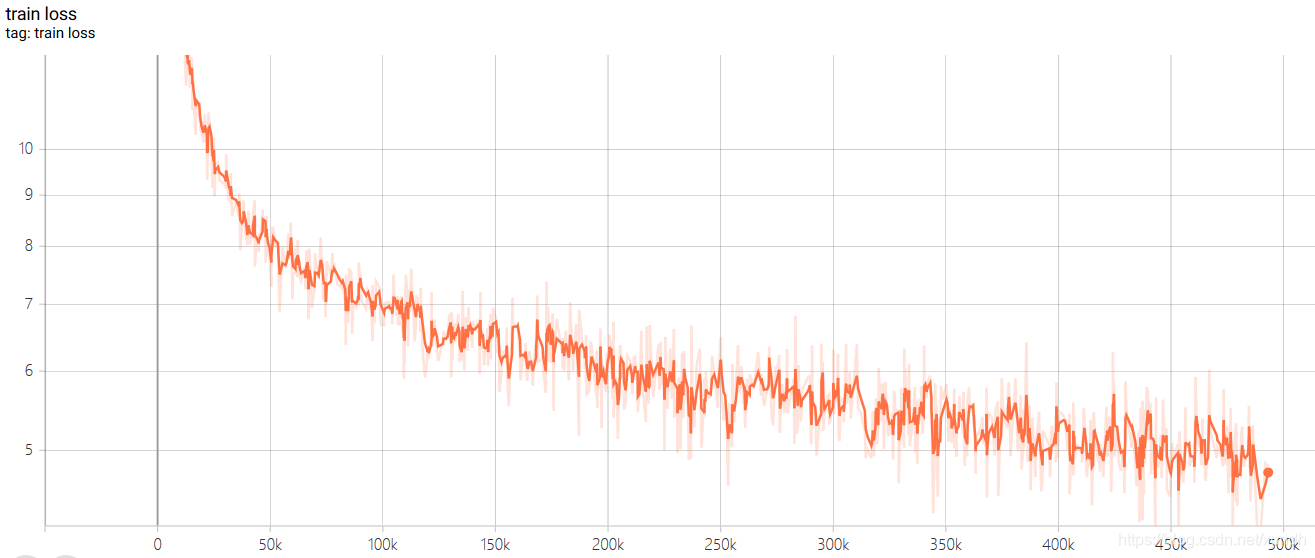
训练过程截图:
训练集损失函数:
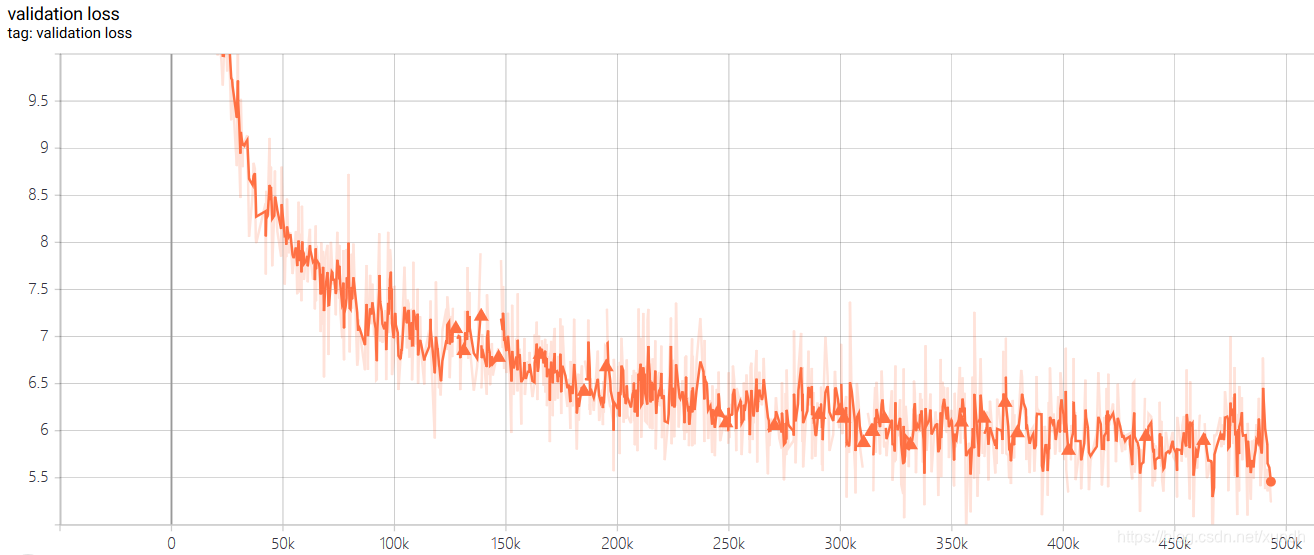
测试集损失函数:
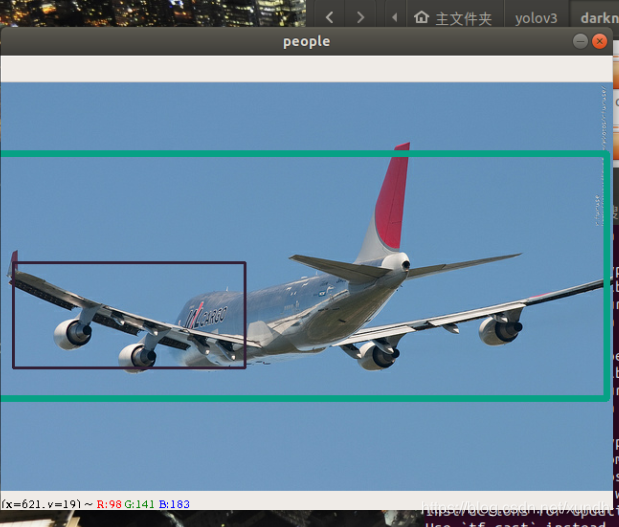
检测结果:


2. 使用训练好的模型预测Predictor.py
调用方式:
python3 Predictor.py <path/to/image>
#!/usr/bin/python3
import sys;
from os.path import exists;
import numpy as np;
import cv2;
import tensorflow as tf;
from YOLOv3 import YOLOv3, OutputParser;
class Predictor(object):
anchors = {2: [[10, 13], [16, 30], [33, 23]], 1: [[30, 61], [62, 45], [59, 119]], 0: [[116, 90], [156, 198], [373, 326]]};
def __init__(self, input_shape = (416,416,3), class_num = 80, yolov3 = None):
if yolov3 is None:
self.input_shape = input_shape;
if exists("yolov3.h5"):
# restore from serialized file
self.yolov3 = tf.keras.models.load_model('yolov3.h5', compile = False);
else:
# restore from checkpoint
self.yolov3 = YOLOv3(input_shape, class_num);
optimizer = tf.keras.optimizers.Adam(1e-4);
checkpoint = tf.train.Checkpoint(model = self.yolov3, optimizer = optimizer, optimizer_step = optimizer.iterations);
checkpoint.restore(tf.train.latest_checkpoint('checkpoints'));
else:
self.input_shape = tuple(yolov3.input.shape[1:]);
self.yolov3 = yolov3;
self.parsers = [OutputParser(tuple(self.yolov3.outputs[l].shape[1:]), self.input_shape, self.anchors[l]) for l in range(3)];
def predict(self, image, conf_thres = 0.5, nms_thres = 0.5):
images = tf.expand_dims(image, axis = 0);
resize_images = tf.image.resize(images, self.input_shape[:2], method = tf.image.ResizeMethod.BICUBIC, preserve_aspect_ratio = True);
resize_shape = resize_images.shape[1:3];
top_pad = (self.input_shape[0] - resize_shape[0]) // 2;
bottom_pad = self.input_shape[0] - resize_shape[0] - top_pad;
left_pad = (self.input_shape[1] - resize_shape[1]) // 2;
right_pad = self.input_shape[1] - resize_shape[1] - left_pad;
resize_images = tf.pad(resize_images,[[0,0], [top_pad,bottom_pad], [left_pad,right_pad], [0,0]], constant_values = 128);
deviation = tf.constant([left_pad / self.input_shape[1], top_pad / self.input_shape[0], 0, 0], dtype = tf.float32);
scale = tf.constant([
self.input_shape[1] / resize_shape[1], self.input_shape[0] / resize_shape[0],
self.input_shape[1] / resize_shape[1], self.input_shape[0] / resize_shape[0]
], dtype = tf.float32);
images_data = tf.cast(resize_images, tf.float32) / 255.;
outputs = self.yolov3(images_data);
whole_targets = tf.zeros((0,6), dtype = tf.float32);
for i in range(3):
pred_xy, pred_wh, pred_box_confidence, pred_class = self.parsers[i](outputs[i]);
pred_box = tf.keras.layers.Concatenate(axis = -1)([pred_xy, pred_wh]);
# target_mask.shape = (h, w, anchor num)
target_mask = tf.greater(pred_box_confidence, conf_thres);
# pred_box_confidence = (pred target num, 1)
pred_box_confidence = tf.boolean_mask(pred_box_confidence, target_mask);
pred_box_confidence = tf.expand_dims(pred_box_confidence, axis = -1);
# pred_box.shape = (pred target num, 4)
pred_box = tf.boolean_mask(pred_box, target_mask);
pred_box = (pred_box - deviation) * scale * [image.shape[1], image.shape[0], image.shape[1], image.shape[0]];
# pred_class.shape = (pred target num, 1)
pred_class = tf.boolean_mask(pred_class, target_mask);
pred_class = tf.math.argmax(pred_class, axis = -1);
pred_class = tf.cast(tf.expand_dims(pred_class, axis = -1), dtype = tf.float32);
# targets,sgaoe = (pred target num, 6)
targets = tf.keras.layers.Concatenate(axis = -1)([pred_box, pred_box_confidence, pred_class]);
whole_targets = tf.keras.layers.Concatenate(axis = 0)([whole_targets, targets]);
# nms
descend_idx = tf.argsort(whole_targets[..., 4], direction = 'DESCENDING');
i = 0;
while i < descend_idx.shape[0]:
idx = descend_idx[i];
cur_upper_left = whole_targets[idx, 0:2] - whole_targets[idx, 2:4] / 2;
cur_down_right = cur_upper_left + whole_targets[idx, 2:4];
wh = whole_targets[idx, 2:4];
area = wh[..., 0] * wh[..., 1];
following_idx = descend_idx[i+1:];
following_targets = tf.gather(whole_targets, following_idx);
following_upper_left = following_targets[..., 0:2] - following_targets[..., 2:4] / 2;
following_down_right = following_upper_left + following_targets[..., 2:4];
following_wh = following_targets[..., 2:4];
following_area = following_wh[..., 0] * following_wh[..., 1];
max_upper_left = tf.math.maximum(cur_upper_left, following_upper_left);
min_down_right = tf.math.minimum(cur_down_right, following_down_right);
intersect_wh = min_down_right - max_upper_left;
intersect_wh = tf.where(tf.math.greater(intersect_wh, 0), intersect_wh, tf.zeros_like(intersect_wh));
intersect_area = intersect_wh[..., 0] * intersect_wh[..., 1];
overlap = intersect_area / (area + following_area - intersect_area);
indices = tf.where(tf.less(overlap, nms_thres));
following_idx = tf.gather_nd(following_idx, indices);
descend_idx = tf.concat([descend_idx[:i + 1], following_idx], axis = 0);
i += 1;
whole_targets = tf.gather(whole_targets, descend_idx);
upper_left = (whole_targets[..., 0:2] - whole_targets[..., 2:4] / 2)
down_right = (upper_left + whole_targets[..., 2:4])
boundings = tf.keras.layers.Concatenate(axis = -1)([upper_left, down_right, whole_targets[..., 4:]]);
return boundings;
if __name__ == "__main__":
assert tf.executing_eagerly() == True;
if len(sys.argv) != 2:
print("Usage: " + sys.argv[0] + " <image>");
exit(0);
predictor = Predictor();
img = cv2.imread(sys.argv[1]);
if img is None:
print("invalid image!");
exit(1);
boundings = predictor.predict(img);
color_map = dict();
for bounding in boundings:
if bounding[5].numpy().astype('int32') in color_map:
clr = color_map[bounding[5].numpy().astype('int32')];
else:
color_map[bounding[5].numpy().astype('int32')] = tuple(np.random.randint(low=0, high=256,size=(3,)).tolist());
clr = color_map[bounding[5].numpy().astype('int32')];
cv2.rectangle(img, tuple(bounding[0:2].numpy().astype('int32')), tuple(bounding[2:4].numpy().astype('int32')), clr, 2);
cv2.imshow('people', img);
cv2.waitKey();
下面是运行效果:
python3 Predictor.py pics/detection1.png
3. 训练自己的数据集
标签文件格式
<path/to/image1> <target num>
<x> <y> <width> <height> <label>
<x> <y> <width> <height> <label>
...
<x> <y> <width> <height> <label>
<path/to/image2> <target num>
...
生成tfrecord文件
python3 create_dataset.py <path/to/annotation>
读取tfrecord可以使用:
from create_dataset import parse_function_generator;
trainset = tf.data.TFRecordDataset('trainset.tfrecord').map(parse_function_generator(num_classes = num_classes)).repeat(100).shuffle(batch_size).batch(batch_size).prefetch(tf.data.experimental.AUTOTUNE);