一、Linux下SPI驱动介绍
内核版本:2.6.35
Linux下SPI驱动和I2C驱动很类似,他们都是一种总线,且都不支持热拔插,因为一般情况下spi或者i2c设备都是直接焊接在板子上的,不像USB设备那样随时插拔,所以根据总线——设备——驱动模型,spi和i2c设备都可以通过xxx_board_info结构体进行注册,Linux下spi驱动的架构如下:
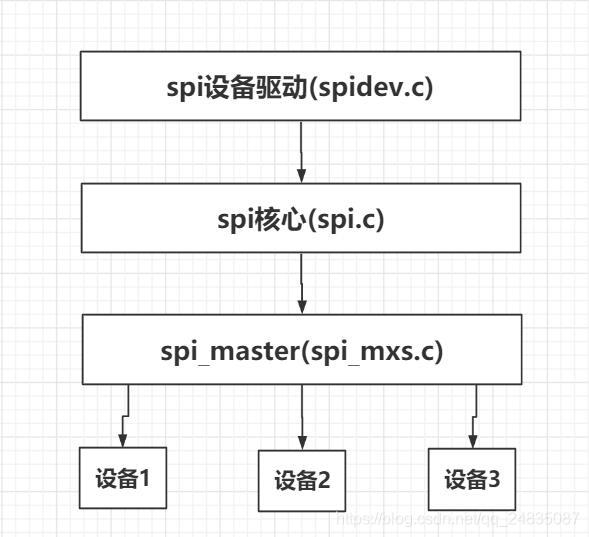
spi核心层提供spi master、spi设备和驱动的注册、卸载函数,以及spi通信函数。
spi master是Linux虚拟处理的一个概念,实际上就是spi主机,一般是在芯片内部,芯片有多少个spi接口,就代表有几个master,每个master下面可以挂多个spi设备,但是每个设备都需要一个单独的片选信号。spi master就相当于i2c的adapter,spi master的驱动芯片厂商已经写好,不需要我们去编写,它会操作芯片内部寄存器实现和挂在该master下面的设备进行spi通信。
应用层和挂在某个master下的spi设备通信流程如下:
用户层操作spi设备驱动(open、write、read)——spi设备驱动调用spi核心层提供的通信函数sync或async——调用对应spi master的transfer函数,最终实现和spi设备的通信。
下面就开始编写一个Linux下spi驱动——RC522驱动
二、RC522设备
根据总线——设备——驱动模型,首先需要注册一个spi设备——rc522设备:
首先介绍下几个比较重要的结构体:
1. spi_board_info
struct spi_board_info {
char modalias[SPI_NAME_SIZE];//spi设备名 驱动的名字需和设备名保持一致
const void *platform_data;
void *controller_data;
int irq;
u32 max_speed_hz;//spi最大时钟频率
u16 bus_num;//spi主机序号,表明该设备是挂在哪一个spi master下
u16 chip_select;//片选脚
u8 mode;//spi模式 SPI_CPHA SPI_CPOL共有四种组合方式
};
spi_board_info用来描述一个spi板级设备信息,其中包括设备名、要使用哪一个spi主机、spi模式以及使用哪个片选脚,这里的片选是由spi 主机自动控制的,一个设备只能对应一个片选,但是也可以不使用这个片选,可以申请一个普通IO口当作片选,最后再调用spi_new_device注册设备即可。
SPI_CPHA选择对数据线采样的时机,0选择每个时钟周期的第一个沿跳变时采样数据,1选择第二个时钟沿采样数据;SPI_CPOL选择每个时钟周期开始的极性,0表示时钟以低电平开始,1选择高电平开始。这两个比特位有四种组合,对应SPI_MODE_0~SPI_MODE_3。
2. spi_device
spi_device结构体用来描述一个spi设备,可以根据前面板级设备信息注册一个spi设备。
struct spi_device {
struct device dev;
struct spi_master *master;
u32 max_speed_hz;//spi最大时钟频率
u8 chip_select;//片选脚
u8 mode;//spi 模式
#define SPI_CPHA 0x01 /* clock phase */
#define SPI_CPOL 0x02 /* clock polarity */
#define SPI_MODE_0 (0|0) /* (original MicroWire) */
#define SPI_MODE_1 (0|SPI_CPHA)
#define SPI_MODE_2 (SPI_CPOL|0)
#define SPI_MODE_3 (SPI_CPOL|SPI_CPHA)
#define SPI_CS_HIGH 0x04 /* chipselect active high? */
#define SPI_LSB_FIRST 0x08 /* per-word bits-on-wire */
#define SPI_3WIRE 0x10 /* SI/SO signals shared */
#define SPI_LOOP 0x20 /* loopback mode */
#define SPI_NO_CS 0x40 /* 1 dev/bus, no chipselect */
#define SPI_READY 0x80 /* slave pulls low to pause */
u8 bits_per_word;
int irq;
void *controller_state;
void *controller_data;
char modalias[SPI_NAME_SIZE];//spi设备名
};
rc522_dev.c:
#include <linux/kernel.h>
#include <linux/module.h>
#include <linux/platform_device.h>
#include <linux/spi/spi.h>
static struct spi_board_info rc522_board_info =
{
.modalias = "rc522",
.max_speed_hz = 8000000,
.bus_num = 1,
.chip_select = 0,
.mode = SPI_MODE_0,
};
static struct spi_device* rc522_dev = NULL;
static int rc522_dev_init(void)
{
struct spi_master *rc522_master = NULL;
rc522_master = spi_busnum_to_master(rc522_board_info.bus_num);//根据spi总线编号获取一个spi master
if(rc522_master != NULL)
{
rc522_dev = spi_new_device(rc522_master,&rc522_board_info);//注册spi设备
if(rc522_dev != NULL)
{
printk("module init ok \n");
return 0;
}
else
{
printk("create rc522_dev error \n");
return -1;
}
}
else
{
printk("rc522_master not found \n");
return -1;
}
}
static void rc522_dev_exit(void)
{
spi_unregister_device(rc522_dev);
printk("module exit ok \n");
}
module_init(rc522_dev_init);
module_exit(rc522_dev_exit);
MODULE_LICENSE("GPL");
MODULE_AUTHOR("xzx2020");
三、RC522驱动
rc522驱动有个重要的结构体spi_driver:
struct spi_driver {
const struct spi_device_id *id_table;
int (*probe)(struct spi_device *spi);
int (*remove)(struct spi_device *spi);
void (*shutdown)(struct spi_device *spi);
int (*suspend)(struct spi_device *spi, pm_message_t mesg);
int (*resume)(struct spi_device *spi);
struct device_driver driver;
};
struct device_driver {
const char *name;//驱动名字,需和设备名保持一致
struct bus_type *bus;
struct module *owner;
const char *mod_name; /* used for built-in modules */
bool suppress_bind_attrs; /* disables bind/unbind via sysfs */
#if defined(CONFIG_OF)
const struct of_device_id *of_match_table;
#endif
int (*probe) (struct device *dev);
int (*remove) (struct device *dev);
void (*shutdown) (struct device *dev);
int (*suspend) (struct device *dev, pm_message_t state);
int (*resume) (struct device *dev);
const struct attribute_group **groups;
const struct dev_pm_ops *pm;
struct driver_private *p;
};
我们需要实现的是spi_driver的probe和remove函数,然后在probe函数里实现字符设备注册,在remove函数里实现字符设备卸载。
spi_write:spi写入若干字节
spi_write_then_read:spi写入若干字节并读取若干字节
rc522_drv.c:
这里的片选脚由spi_master自动控制。
#include <linux/kernel.h>
#include <linux/module.h>
#include <linux/platform_device.h>
#include <linux/spi/spi.h>
#include <linux/err.h>
#include <linux/slab.h>
#include <linux/fs.h>
#include <asm/uaccess.h>
#include <linux/cdev.h>
#include <linux/delay.h>
#include <linux/gpio.h>//gpio_request gpio_free函数
#include <../arch/arm/mach-mx28/mx28_pins.h>
#define DEVICE_NAME "rc522_drv" //驱动名称
#define RST_PIN MXS_PIN_TO_GPIO(PINID_SSP0_DATA7) //p2.7
#define CS_PIN MXS_PIN_TO_GPIO(PINID_SSP0_DATA6) //p2.6
#define RC522_RST_Enable() gpio_direction_output(RST_PIN,0)
#define RC522_RST_Disable() gpio_direction_output(RST_PIN,1)
#define RC522_CS_Enable() gpio_direction_output(CS_PIN,0)
#define RC522_CS_Disable() gpio_direction_output(CS_PIN,1)
static struct spi_device* rc522_dev = NULL;
static struct cdev *rc522_cdev = NULL;
static struct class *rc522_class = NULL;
static struct device *rc522_device = NULL;
static dev_t device_id;
static int rc522_open(struct inode *inode, struct file *filp)
{
int ret = -1,ret2 = -1;
gpio_free(RST_PIN);
gpio_free(CS_PIN);
ret = gpio_request(RST_PIN, "RC522_RST");
ret2 = gpio_request(CS_PIN, "RC522_CS");
printk("RST_PIN=%d CS_PIN=%d\n",ret,ret2);
RC522_RST_Disable();
udelay(1);
RC522_RST_Enable();
udelay(1);
RC522_RST_Disable();
return 0;
}
static int rc522_release(struct inode *inode, struct file *filp)
{
RC522_RST_Enable();
gpio_free(RST_PIN);
//gpio_free(CS_PIN);
return 0;
}
static ssize_t rc522_read(struct file *filp, char __user *buf, size_t count,
loff_t *f_pos)
{
uint8_t address,ret;
int status = -1;
copy_from_user(&address,buf, 1);
//printk("read: %x = ",buf[0]);
//RC522_CS_Enable();
address = (( address << 1 ) & 0x7E) | 0x80;
status = spi_write_then_read(rc522_dev,&address,1,&ret,1);
//ret = spi_read(rc522_dev,&address,1);
// printk("%x\n",ret);
//RC522_CS_Disable();
//printk("spi_write_then_read %d\n",status);
copy_to_user((void *)buf,&ret,1);
return 0;
}
static ssize_t rc522_write(struct file *filp, const char __user *buf,
size_t count, loff_t *f_pos)
{
uint8_t address,value,buffer[2];
copy_from_user(buffer,buf, 2);
//printk("write: %x %x \n",buf[0],buf[1]);
//address = buffer[0];
//value = buffer[1];
//RC522_CS_Enable();
buffer[0] = (( buffer[0] << 1 ) & 0x7E);
spi_write(rc522_dev,buffer,2);
//RC522_CS_Disable();
return 0;
}
static struct file_operations rc522_fops =
{
.owner = THIS_MODULE,
.open = rc522_open,
.release = rc522_release,
.write = rc522_write,
.read = rc522_read,
};
static int __devinit rc522_probe(struct spi_device *spi)
{
int ret;
rc522_dev = spi;
/*申请设备号*/
ret = alloc_chrdev_region(&device_id, 0, 1, DEVICE_NAME);
if(ret < 0)
{
printk(KERN_ERR "alloc dev_id error %d \n", ret);
return ret;
}
/*分配一个cdev结构体*/
rc522_cdev = cdev_alloc();
if(rc522_cdev != NULL)
{
/*初始化cdev结构体*/
cdev_init(rc522_cdev, &rc522_fops);
ret = cdev_add(rc522_cdev,device_id,1);
if(ret != 0)
{
printk("cdev add error %d \n",ret);
goto error;
}
}
else
{
printk("cdev_alloc error \n");
return -1;
}
/*创建一个cdev结构体*/
rc522_class = class_create(THIS_MODULE, "rc522_class");
if(rc522_class != NULL)
{
/*创建一个device结构体*/
rc522_device = device_create(rc522_class, NULL, device_id, NULL, DEVICE_NAME);
printk("module init ok\n");
return 0;
}
else
{
printk("class_create error\n");
return -1;
}
error:
cdev_del(rc522_cdev);
unregister_chrdev_region(device_id,1);
return -1;
}
static int __devexit rc522_remove(struct spi_device *spi)
{
cdev_del(rc522_cdev);
unregister_chrdev_region(device_id,1);
device_del(rc522_device);
class_destroy(rc522_class);
printk("module exit ok\n");
return 0;
}
static struct spi_driver rc522_driver = {
.driver = {
.name = "rc522",
.owner = THIS_MODULE,
},
.probe = rc522_probe,
.remove = __devexit_p(rc522_remove),
};
static int __init rc522_init(void)
{
int ret;
ret = spi_register_driver(&rc522_driver);
if(ret < 0)
{
printk("spi_register_driver error= %d \n",ret);
return ret;
}
return 0;
}
static void __exit rc522_exit(void)
{
spi_unregister_driver(&rc522_driver);
}
module_init(rc522_init);
module_exit(rc522_exit);
MODULE_AUTHOR("xzx2020");
MODULE_DESCRIPTION("rc522 driver");
MODULE_LICENSE("GPL");
四、测试
rc522.c:
#include <stdlib.h> /* using sleep() */
#include <fcntl.h> /* using file operation */
#include <sys/ioctl.h> /* using ioctl() */
#include <asm/ioctls.h>
#include <unistd.h> //sleep write read close
#include "rc522.h"
int fd = 0;//文件句柄
/**
* @brief 读RC522寄存器
* @param ucAddress,寄存器地址
* @retval 寄存器的当前值
*/
uint8_t ReadRawRC( uint8_t Address )
{
uint8_t buf[1];
buf[0] = Address;
read(fd,buf,1);
return buf[0];
}
/**
* @brief 写RC522寄存器
* @param ucAddress,寄存器地址
* @param ucValue,写入寄存器的值
* @retval 无
*/
void WriteRawRC( uint8_t Address, uint8_t Value )
{
uint8_t buf[2];
buf[0] = Address;
buf[1] = Value;
write(fd,buf,2);
}
/**
* @brief 对RC522寄存器置位
* @param ucReg,寄存器地址
* @param ucMask,置位值
* @retval 无
*/
void SetBitMask ( uint8_t ucReg, uint8_t ucMask )
{
uint8_t ucTemp;
ucTemp = ReadRawRC ( ucReg );
WriteRawRC ( ucReg, ucTemp | ucMask ); // set bit mask
}
/**
* @brief 对RC522寄存器清位
* @param ucReg,寄存器地址
* @param ucMask,清位值
* @retval 无
*/
void ClearBitMask ( uint8_t ucReg, uint8_t ucMask )
{
uint8_t ucTemp;
ucTemp = ReadRawRC ( ucReg );
WriteRawRC ( ucReg, ucTemp & ( ~ ucMask) ); // clear bit mask
}
/**
* @brief 开启天线
* @param 无
* @retval 无
*/
void PcdAntennaOn ( void )
{
uint8_t uc;
uc = ReadRawRC ( TxControlReg );
if ( ! ( uc & 0x03 ) )
SetBitMask(TxControlReg, 0x03);
}
/**
* @brief 关闭天线
* @param 无
* @retval 无
*/
void PcdAntennaOff ( void )
{
ClearBitMask ( TxControlReg, 0x03 );
}
/**
* @brief 复位RC522
* @param 无
* @retval 0:复位成功
*/
int PcdReset(void)
{
fd = open("/dev/rc522_drv",O_RDWR);
if(fd < 0)
{
printf("open rc522_drv error %d\n",fd);
return fd;
}
WriteRawRC ( CommandReg, 0x0f );
while ( ReadRawRC ( CommandReg ) & 0x10 );
//定义发送和接收常用模式 和Mifare卡通讯,CRC初始值0x6363
WriteRawRC ( ModeReg, 0x3D );
WriteRawRC ( TReloadRegL, 30 ); //16位定时器低位
WriteRawRC ( TReloadRegH, 0 ); //16位定时器高位
WriteRawRC ( TModeReg, 0x8D ); //定义内部定时器的设置
WriteRawRC ( TPrescalerReg, 0x3E ); //设置定时器分频系数
WriteRawRC ( TxAutoReg, 0x40 ); //调制发送信号为100%ASK
return 0;
}
/**
* @brief 设置RC522的工作方式
* @param ucType,工作方式
* @retval 无
*/
void M500PcdConfigISOType ( uint8_t ucType )
{
if ( ucType == 'A') //ISO14443_A
{
ClearBitMask ( Status2Reg, 0x08 );
WriteRawRC ( ModeReg, 0x3D ); //3F
WriteRawRC ( RxSelReg, 0x86 ); //84
WriteRawRC( RFCfgReg, 0x7F ); //4F
WriteRawRC( TReloadRegL, 30 );
WriteRawRC ( TReloadRegH, 0 );
WriteRawRC ( TModeReg, 0x8D );
WriteRawRC ( TPrescalerReg, 0x3E );
usleep(10000);
PcdAntennaOn ();//开天线
}
}
/**
* @brief 通过RC522和ISO14443卡通讯
* @param ucCommand,RC522命令字
* @param pInData,通过RC522发送到卡片的数据
* @param ucInLenByte,发送数据的字节长度
* @param pOutData,接收到的卡片返回数据
* @param pOutLenBit,返回数据的位长度
* @retval 状态值= MI_OK,成功
*/
char PcdComMF522 ( uint8_t ucCommand,
uint8_t * pInData,
uint8_t ucInLenByte,
uint8_t * pOutData,
uint32_t * pOutLenBit )
{
char cStatus = MI_ERR;
uint8_t ucIrqEn = 0x00;
uint8_t ucWaitFor = 0x00;
uint8_t ucLastBits;
uint8_t ucN;
uint32_t ul;
switch ( ucCommand )
{
case PCD_AUTHENT: //Mifare认证
ucIrqEn = 0x12; //允许错误中断请求ErrIEn 允许空闲中断IdleIEn
ucWaitFor = 0x10; //认证寻卡等待时候 查询空闲中断标志位
break;
case PCD_TRANSCEIVE: //接收发送 发送接收
ucIrqEn = 0x77; //允许TxIEn RxIEn IdleIEn LoAlertIEn ErrIEn TimerIEn
ucWaitFor = 0x30; //寻卡等待时候 查询接收中断标志位与 空闲中断标志位
break;
default:
break;
}
//IRqInv置位管脚IRQ与Status1Reg的IRq位的值相反
WriteRawRC ( ComIEnReg, ucIrqEn | 0x80 );
//Set1该位清零时,CommIRqReg的屏蔽位清零
ClearBitMask ( ComIrqReg, 0x80 );
//写空闲命令
WriteRawRC ( CommandReg, PCD_IDLE );
//置位FlushBuffer清除内部FIFO的读和写指针以及ErrReg的BufferOvfl标志位被清除
SetBitMask ( FIFOLevelReg, 0x80 );
for ( ul = 0; ul < ucInLenByte; ul ++ )
WriteRawRC ( FIFODataReg, pInData [ ul ] ); //写数据进FIFOdata
WriteRawRC ( CommandReg, ucCommand ); //写命令
if ( ucCommand == PCD_TRANSCEIVE )
//StartSend置位启动数据发送 该位与收发命令使用时才有效
SetBitMask(BitFramingReg,0x80);
ul = 1000; //根据时钟频率调整,操作M1卡最大等待时间25ms
do //认证 与寻卡等待时间
{
ucN = ReadRawRC ( ComIrqReg ); //查询事件中断
ul --;
} while ( ( ul != 0 ) && ( ! ( ucN & 0x01 ) ) && ( ! ( ucN & ucWaitFor ) ) );
ClearBitMask ( BitFramingReg, 0x80 ); //清理允许StartSend位
if ( ul != 0 )
{
//读错误标志寄存器BufferOfI CollErr ParityErr ProtocolErr
if ( ! ( ReadRawRC ( ErrorReg ) & 0x1B ) )
{
cStatus = MI_OK;
if ( ucN & ucIrqEn & 0x01 ) //是否发生定时器中断
cStatus = MI_NOTAGERR;
if ( ucCommand == PCD_TRANSCEIVE )
{
//读FIFO中保存的字节数
ucN = ReadRawRC ( FIFOLevelReg );
//最后接收到得字节的有效位数
ucLastBits = ReadRawRC ( ControlReg ) & 0x07;
if ( ucLastBits )
//N个字节数减去1(最后一个字节)+最后一位的位数 读取到的数据总位数
* pOutLenBit = ( ucN - 1 ) * 8 + ucLastBits;
else
* pOutLenBit = ucN * 8; //最后接收到的字节整个字节有效
if ( ucN == 0 )
ucN = 1;
if ( ucN > MAXRLEN )
ucN = MAXRLEN;
for ( ul = 0; ul < ucN; ul ++ )
pOutData [ ul ] = ReadRawRC ( FIFODataReg );
}
}
else
cStatus = MI_ERR;
}
SetBitMask ( ControlReg, 0x80 ); // stop timer now
WriteRawRC ( CommandReg, PCD_IDLE );
return cStatus;
}
/**
* @brief 寻卡
* @param ucReq_code,寻卡方式 = 0x52,寻感应区内所有符合14443A标准的卡;
寻卡方式= 0x26,寻未进入休眠状态的卡
* @param pTagType,卡片类型代码
= 0x4400,Mifare_UltraLight
= 0x0400,Mifare_One(S50)
= 0x0200,Mifare_One(S70)
= 0x0800,Mifare_Pro(X))
= 0x4403,Mifare_DESFire
* @retval 状态值= MI_OK,成功
*/
char PcdRequest ( uint8_t ucReq_code, uint8_t * pTagType )
{
char cStatus;
uint8_t ucComMF522Buf [ MAXRLEN ];
uint32_t ulLen;
//清理指示MIFARECyptol单元接通以及所有卡的数据通信被加密的情况
ClearBitMask ( Status2Reg, 0x08 );
//发送的最后一个字节的 七位
WriteRawRC ( BitFramingReg, 0x07 );
//ClearBitMask ( TxControlReg, 0x03 );
//TX1,TX2管脚的输出信号传递经发送调制的13.56的能量载波信号
//usleep(10000);
//SetBitMask ( TxControlReg, 0x03 );
ucComMF522Buf [ 0 ] = ucReq_code; //存入 卡片命令字
cStatus = PcdComMF522 ( PCD_TRANSCEIVE,
ucComMF522Buf,
1,
ucComMF522Buf,
& ulLen ); //寻卡
if ( ( cStatus == MI_OK ) && ( ulLen == 0x10 ) ) //寻卡成功返回卡类型
{
* pTagType = ucComMF522Buf [ 0 ];
* ( pTagType + 1 ) = ucComMF522Buf [ 1 ];
}
else
cStatus = MI_ERR;
return cStatus;
}
/**
* @brief 防冲撞
* @param pSnr,卡片序列号,4字节
* @retval 状态值= MI_OK,成功
*/
char PcdAnticoll ( uint8_t * pSnr )
{
char cStatus;
uint8_t uc, ucSnr_check = 0;
uint8_t ucComMF522Buf [ MAXRLEN ];
uint32_t ulLen;
//清MFCryptol On位 只有成功执行MFAuthent命令后,该位才能置位
ClearBitMask ( Status2Reg, 0x08 );
//清理寄存器 停止收发
WriteRawRC ( BitFramingReg, 0x00);
//清ValuesAfterColl所有接收的位在冲突后被清除
ClearBitMask ( CollReg, 0x80 );
ucComMF522Buf [ 0 ] = 0x93; //卡片防冲突命令
ucComMF522Buf [ 1 ] = 0x20;
cStatus = PcdComMF522 ( PCD_TRANSCEIVE,
ucComMF522Buf,
2,
ucComMF522Buf,
& ulLen); //与卡片通信
if ( cStatus == MI_OK) //通信成功
{
for ( uc = 0; uc < 4; uc ++ )
{
* ( pSnr + uc ) = ucComMF522Buf [ uc ]; //读出UID
ucSnr_check ^= ucComMF522Buf [ uc ];
}
if ( ucSnr_check != ucComMF522Buf [ uc ] )
cStatus = MI_ERR;
}
SetBitMask ( CollReg, 0x80 );
return cStatus;
}
/**
* @brief 用RC522计算CRC16
* @param pIndata,计算CRC16的数组
* @param ucLen,计算CRC16的数组字节长度
* @param pOutData,存放计算结果存放的首地址
* @retval 无
*/
void CalulateCRC ( uint8_t * pIndata,
uint8_t ucLen,
uint8_t * pOutData )
{
uint8_t uc, ucN;
ClearBitMask(DivIrqReg,0x04);
WriteRawRC(CommandReg,PCD_IDLE);
SetBitMask(FIFOLevelReg,0x80);
for ( uc = 0; uc < ucLen; uc ++)
WriteRawRC ( FIFODataReg, * ( pIndata + uc ) );
WriteRawRC ( CommandReg, PCD_CALCCRC );
uc = 0xFF;
do
{
ucN = ReadRawRC ( DivIrqReg );
uc --;
} while ( ( uc != 0 ) && ! ( ucN & 0x04 ) );
pOutData [ 0 ] = ReadRawRC ( CRCResultRegL );
pOutData [ 1 ] = ReadRawRC ( CRCResultRegM );
}
/**
* @brief 选定卡片
* @param pSnr,卡片序列号,4字节
* @retval 状态值= MI_OK,成功
*/
char PcdSelect ( uint8_t * pSnr )
{
char ucN;
uint8_t uc;
uint8_t ucComMF522Buf [ MAXRLEN ];
uint32_t ulLen;
ucComMF522Buf [ 0 ] = PICC_ANTICOLL1;
ucComMF522Buf [ 1 ] = 0x70;
ucComMF522Buf [ 6 ] = 0;
for ( uc = 0; uc < 4; uc ++ )
{
ucComMF522Buf [ uc + 2 ] = * ( pSnr + uc );
ucComMF522Buf [ 6 ] ^= * ( pSnr + uc );
}
CalulateCRC ( ucComMF522Buf, 7, & ucComMF522Buf [ 7 ] );
ClearBitMask ( Status2Reg, 0x08 );
ucN = PcdComMF522 ( PCD_TRANSCEIVE,
ucComMF522Buf,
9,
ucComMF522Buf,
& ulLen );
if ( ( ucN == MI_OK ) && ( ulLen == 0x18 ) )
ucN = MI_OK;
else
ucN = MI_ERR;
return ucN;
}
/**
* @brief 验证卡片密码
* @param ucAuth_mode,密码验证模式= 0x60,验证A密钥,
密码验证模式= 0x61,验证B密钥
* @param uint8_t ucAddr,块地址
* @param pKey,密码
* @param pSnr,卡片序列号,4字节
* @retval 状态值= MI_OK,成功
*/
char PcdAuthState ( uint8_t ucAuth_mode,
uint8_t ucAddr,
uint8_t * pKey,
uint8_t * pSnr )
{
char cStatus;
uint8_t uc, ucComMF522Buf [ MAXRLEN ];
uint32_t ulLen;
ucComMF522Buf [ 0 ] = ucAuth_mode;
ucComMF522Buf [ 1 ] = ucAddr;
for ( uc = 0; uc < 6; uc ++ )
ucComMF522Buf [ uc + 2 ] = * ( pKey + uc );
for ( uc = 0; uc < 6; uc ++ )
ucComMF522Buf [ uc + 8 ] = * ( pSnr + uc );
cStatus = PcdComMF522 ( PCD_AUTHENT,
ucComMF522Buf,
12,
ucComMF522Buf,
& ulLen );
if ( ( cStatus != MI_OK ) || ( ! ( ReadRawRC ( Status2Reg ) & 0x08 ) ) )
cStatus = MI_ERR;
return cStatus;
}
/**
* @brief 写数据到M1卡一块
* @param uint8_t ucAddr,块地址
* @param pData,写入的数据,16字节
* @retval 状态值= MI_OK,成功
*/
char PcdWrite ( uint8_t ucAddr, uint8_t * pData )
{
char cStatus;
uint8_t uc, ucComMF522Buf [ MAXRLEN ];
uint32_t ulLen;
ucComMF522Buf [ 0 ] = PICC_WRITE;
ucComMF522Buf [ 1 ] = ucAddr;
CalulateCRC ( ucComMF522Buf, 2, & ucComMF522Buf [ 2 ] );
cStatus = PcdComMF522 ( PCD_TRANSCEIVE,
ucComMF522Buf,
4,
ucComMF522Buf,
& ulLen );
if ( ( cStatus != MI_OK ) || ( ulLen != 4 ) ||
( ( ucComMF522Buf [ 0 ] & 0x0F ) != 0x0A ) )
cStatus = MI_ERR;
if ( cStatus == MI_OK )
{
//memcpy(ucComMF522Buf, pData, 16);
for ( uc = 0; uc < 16; uc ++ )
ucComMF522Buf [ uc ] = * ( pData + uc );
CalulateCRC ( ucComMF522Buf, 16, & ucComMF522Buf [ 16 ] );
cStatus = PcdComMF522 ( PCD_TRANSCEIVE,
ucComMF522Buf,
18,
ucComMF522Buf,
& ulLen );
if ( ( cStatus != MI_OK ) || ( ulLen != 4 ) ||
( ( ucComMF522Buf [ 0 ] & 0x0F ) != 0x0A ) )
cStatus = MI_ERR;
}
return cStatus;
}
/**
* @brief 读取M1卡一块数据
* @param ucAddr,块地址
* @param pData,读出的数据,16字节
* @retval 状态值= MI_OK,成功
*/
char PcdRead ( uint8_t ucAddr, uint8_t * pData )
{
char cStatus;
uint8_t uc, ucComMF522Buf [ MAXRLEN ];
uint32_t ulLen;
ucComMF522Buf [ 0 ] = PICC_READ;
ucComMF522Buf [ 1 ] = ucAddr;
CalulateCRC ( ucComMF522Buf, 2, & ucComMF522Buf [ 2 ] );
cStatus = PcdComMF522 ( PCD_TRANSCEIVE,
ucComMF522Buf,
4,
ucComMF522Buf,
& ulLen );
if ( ( cStatus == MI_OK ) && ( ulLen == 0x90 ) )
{
for ( uc = 0; uc < 16; uc ++ )
* ( pData + uc ) = ucComMF522Buf [ uc ];
}
else
cStatus = MI_ERR;
return cStatus;
}
/**
* @brief 命令卡片进入休眠状态
* @param 无
* @retval 状态值= MI_OK,成功
*/
char PcdHalt( void )
{
uint8_t ucComMF522Buf [ MAXRLEN ];
uint32_t ulLen;
ucComMF522Buf [ 0 ] = PICC_HALT;
ucComMF522Buf [ 1 ] = 0;
CalulateCRC ( ucComMF522Buf, 2, & ucComMF522Buf [ 2 ] );
PcdComMF522 ( PCD_TRANSCEIVE,
ucComMF522Buf,
4,
ucComMF522Buf,
& ulLen );
return MI_OK;
}
void IC_CMT ( uint8_t * UID,
uint8_t * KEY,
uint8_t RW,
uint8_t * Dat )
{
uint8_t ucArray_ID [ 4 ] = { 0 }; //先后存放IC卡的类型和UID(IC卡序列号)
PcdRequest ( 0x52, ucArray_ID ); //寻卡
PcdAnticoll ( ucArray_ID ); //防冲撞
PcdSelect ( UID ); //选定卡
PcdAuthState ( 0x60, 0x10, KEY, UID );//校验
if ( RW ) //读写选择,1是读,0是写
PcdRead ( 0x10, Dat );
else
PcdWrite ( 0x10, Dat );
PcdHalt ();
}
rc522.h:
#ifndef RC522_H
#define RC522_H
#include <stdint.h>
/////////////////////////////////////////////////////////////////////
//MF522命令字
/////////////////////////////////////////////////////////////////////
#define PCD_IDLE 0x00 //取消当前命令
#define PCD_AUTHENT 0x0E //验证密钥
#define PCD_RECEIVE 0x08 //接收数据
#define PCD_TRANSMIT 0x04 //发送数据
#define PCD_TRANSCEIVE 0x0C //发送并接收数据
#define PCD_RESETPHASE 0x0F //复位
#define PCD_CALCCRC 0x03 //CRC计算
/////////////////////////////////////////////////////////////////////
//Mifare_One卡片命令字
/////////////////////////////////////////////////////////////////////
#define PICC_REQIDL 0x26 //寻天线区内未进入休眠状态
#define PICC_REQALL 0x52 //寻天线区内全部卡
#define PICC_ANTICOLL1 0x93 //防冲撞
#define PICC_ANTICOLL2 0x95 //防冲撞
#define PICC_AUTHENT1A 0x60 //验证A密钥
#define PICC_AUTHENT1B 0x61 //验证B密钥
#define PICC_READ 0x30 //读块
#define PICC_WRITE 0xA0 //写块
#define PICC_DECREMENT 0xC0 //扣款
#define PICC_INCREMENT 0xC1 //充值
#define PICC_RESTORE 0xC2 //调块数据到缓冲区
#define PICC_TRANSFER 0xB0 //保存缓冲区中数据
#define PICC_HALT 0x50 //休眠
/////////////////////////////////////////////////////////////////////
//MF522 FIFO长度定义
/////////////////////////////////////////////////////////////////////
#define DEF_FIFO_LENGTH 64 //FIFO size=64byte
#define MAXRLEN 18
/////////////////////////////////////////////////////////////////////
//MF522寄存器定义
/////////////////////////////////////////////////////////////////////
// PAGE 0
#define RFU00 0x00
#define CommandReg 0x01
#define ComIEnReg 0x02
#define DivlEnReg 0x03
#define ComIrqReg 0x04
#define DivIrqReg 0x05
#define ErrorReg 0x06
#define Status1Reg 0x07
#define Status2Reg 0x08
#define FIFODataReg 0x09
#define FIFOLevelReg 0x0A
#define WaterLevelReg 0x0B
#define ControlReg 0x0C
#define BitFramingReg 0x0D
#define CollReg 0x0E
#define RFU0F 0x0F
// PAGE 1
#define RFU10 0x10
#define ModeReg 0x11
#define TxModeReg 0x12
#define RxModeReg 0x13
#define TxControlReg 0x14
#define TxAutoReg 0x15
#define TxSelReg 0x16
#define RxSelReg 0x17
#define RxThresholdReg 0x18
#define DemodReg 0x19
#define RFU1A 0x1A
#define RFU1B 0x1B
#define MifareReg 0x1C
#define RFU1D 0x1D
#define RFU1E 0x1E
#define SerialSpeedReg 0x1F
// PAGE 2
#define RFU20 0x20
#define CRCResultRegM 0x21
#define CRCResultRegL 0x22
#define RFU23 0x23
#define ModWidthReg 0x24
#define RFU25 0x25
#define RFCfgReg 0x26
#define GsNReg 0x27
#define CWGsCfgReg 0x28
#define ModGsCfgReg 0x29
#define TModeReg 0x2A
#define TPrescalerReg 0x2B
#define TReloadRegH 0x2C
#define TReloadRegL 0x2D
#define TCounterValueRegH 0x2E
#define TCounterValueRegL 0x2F
// PAGE 3
#define RFU30 0x30
#define TestSel1Reg 0x31
#define TestSel2Reg 0x32
#define TestPinEnReg 0x33
#define TestPinValueReg 0x34
#define TestBusReg 0x35
#define AutoTestReg 0x36
#define VersionReg 0x37
#define AnalogTestReg 0x38
#define TestDAC1Reg 0x39
#define TestDAC2Reg 0x3A
#define TestADCReg 0x3B
#define RFU3C 0x3C
#define RFU3D 0x3D
#define RFU3E 0x3E
#define RFU3F 0x3F
/////////////////////////////////////////////////////////////////////
//和MF522通讯时返回的错误代码
/////////////////////////////////////////////////////////////////////
#define MI_OK 0x26
#define MI_NOTAGERR 0xcc
#define MI_ERR 0xbb
uint8_t ReadRawRC( uint8_t Address );
void WriteRawRC( uint8_t Address, uint8_t Value );
int PcdReset(void);
void M500PcdConfigISOType ( uint8_t ucType );
char PcdComMF522 ( uint8_t ucCommand,
uint8_t * pInData,
uint8_t ucInLenByte,
uint8_t * pOutData,
uint32_t * pOutLenBit );
char PcdRequest ( uint8_t ucReq_code, uint8_t * pTagType );
char PcdAnticoll(uint8_t * pSnr);
void CalulateCRC ( uint8_t * pIndata,
uint8_t ucLen,
uint8_t * pOutData );
char PcdSelect ( uint8_t * pSnr );
char PcdAuthState ( uint8_t ucAuth_mode,
uint8_t ucAddr,
uint8_t * pKey,
uint8_t * pSnr );
char PcdWrite ( uint8_t ucAddr, uint8_t * pData );
char PcdRead ( uint8_t ucAddr, uint8_t * pData );
char PcdHalt( void );
void IC_CMT ( uint8_t * UID,
uint8_t * KEY,
uint8_t RW,
uint8_t * Dat );
#endif
rc522_test.c:
#include "rc522.h"
#include <stdio.h> /*using printf()*/
#include <stdlib.h> /* using sleep() */
#include <fcntl.h> /* using file operation */
#include <sys/ioctl.h> /* using ioctl() */
#include <asm/ioctls.h>
#include <unistd.h> //sleep write read close
/**
* @brief 测试函数
* @param 无
* @retval 无
*/
void IC_test ( void )
{
uint8_t ucArray_ID [4]; /*先后存放IC卡的类型和UID(IC卡序列号)*/
uint8_t ucStatusReturn; /*返回状态 */
static uint8_t ucLineCount = 0;
while ( 1 )
{
/*寻卡*/
if ( MI_OK == (ucStatusReturn = PcdRequest ( PICC_REQALL, ucArray_ID )))
{
/*防冲撞(当有多张卡进入读写器操作范围时,防冲突机制会从其中选择一张进行操作)*/
if ( PcdAnticoll ( ucArray_ID ) == MI_OK )
{
if(PcdSelect(ucArray_ID)==MI_OK)
{
printf ("The Card ID is: %02X%02X%02X%02X \n",
ucArray_ID [ 0 ],
ucArray_ID [ 1 ],
ucArray_ID [ 2 ],
ucArray_ID [ 3 ] );
PcdHalt();
}
}
}
else
{
printf ("no card \n");
}
sleep(1);
}
}
int main(int argc, const char * argv [ ])
{
int ret = -1;
uint8_t buf[2];
ret = PcdReset();
if(ret != 0)
{
printf("rc522 rst error %d \n",ret);
return 0;
}
M500PcdConfigISOType ( 'A' );
IC_test();
while(1)
{
}
}