经过漫长的基础知识学习,终于到了验证收货的时候了,网上关于这里的内容已经很多了,我这里只讲一些我认为重要的地方。
在SLAM理论中,第一个问题称为定位 (Localization),第二个称为建图 (Mapping),第三个则是随后的路径规划。
图像前端之定位:求旋转矩阵和平移矩阵(新的图像与关键帧比较)
建图:把关键帧的点云拼起来
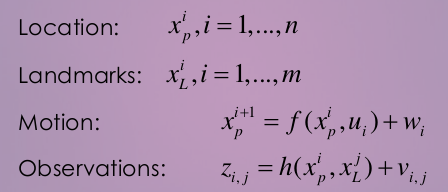
xP是机器人小萝卜的位置,我们假定由n个帧组成。
xL则是路标,在图像处理过程中就是指SIFT提出来的关键点。
如果你做2D SLAM,那么机器人位置就是x, y加一个转角theta。
如果是3D SLAM,就是x,y,z加一个四元数姿态(或者rpy姿态)。
这个过程叫做参数化(Parameterization)。
三维世界中的坐标点单位是米
二维图像平面单位是像素
二者的桥梁是针孔模型(三角形的相似)和畸变模型(径向畸变、切向畸变)
 z 轴指向相机前方、x 向右、y 向下。
z 轴指向相机前方、x 向右、y 向下。
现实世界:空间点“ P ”的坐标为 [X, Y, Z] T
物理成像平面:成像点“ P ′ ”的坐标为 [X ′ , Y ′ , Z ′ ] T
“ P ′ ”的像素坐标[u,v] T
根据三角形相似原理得出下面的公式: