首先上一个总图:
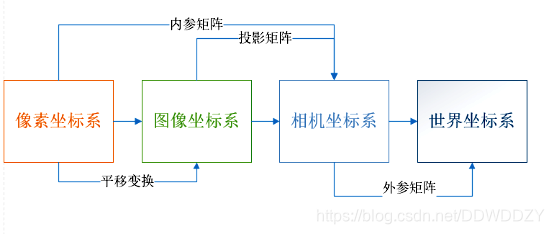
下面依次介绍平移坐标,内参矩阵外参矩阵的具体表示:
一,图像坐标系和像素坐标系
像素坐标系中,每一像素的坐标(u,v)分别是该像素在数组中的列数和行数。所以(u,v)是以像素为单位的图像坐标系的坐标。由于(u,v)只表示像素位于数组中的行列数,并没有用物理单位表示出该像素在图像中的位置。所以建立以物理单位(毫米)表示的图像坐标系。该坐标系以图像内某一点O为原点,原点O定义在相机光轴与图像平面的交点,该点一般位于图像中心处.x轴与y轴分别与u、v两轴平行,如下图所示;
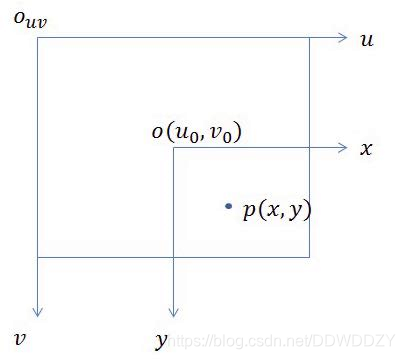 若O在u,v坐标系中的坐标为(u0,v0),每一个像素在x轴与y轴方向上的物理尺寸为dx、dy,则图像中任意一个像素在两个标系下的坐标有如下对应关系:
若O在u,v坐标系中的坐标为(u0,v0),每一个像素在x轴与y轴方向上的物理尺寸为dx、dy,则图像中任意一个像素在两个标系下的坐标有如下对应关系:

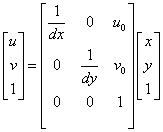
用齐次坐标与矩阵形式将上式表示为平移公式:
二,二维到三维的转换
首先完成从相机坐标系到图像坐标系的转化,
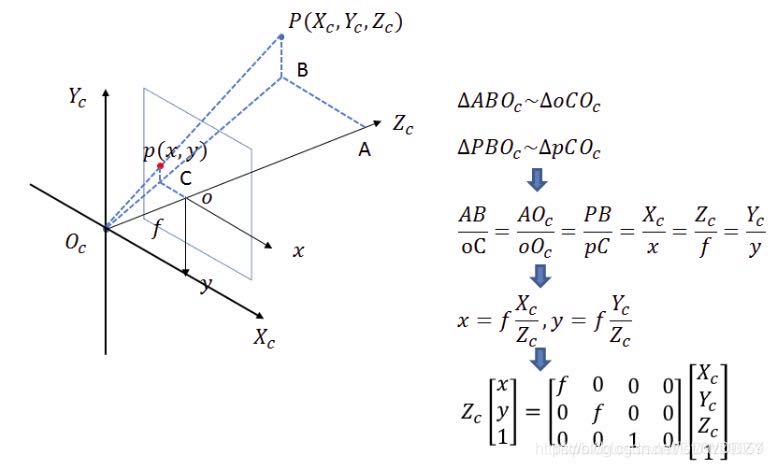 其中由焦距组成的矩阵为投影矩阵,将平移公式代入可得
其中由焦距组成的矩阵为投影矩阵,将平移公式代入可得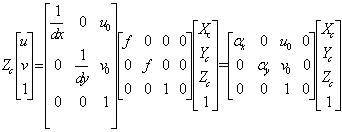 其中,Zc为比例因子,
其中,Zc为比例因子,

为u轴上的尺度因子,也称为u轴上的归一化焦距;

为v轴上的尺度因子,也称为v轴上的归一化焦距;由于

这些参数只与相机的内部参数有关,因此他们所组成的矩阵成为称为相机的内参矩阵
三,相机坐标系向世界坐标系的转换关系
下图所示为相机成像的几何关系。其中O点称为相机光心,Xc轴与x轴平行,Yc轴与图像的y轴平行,Zc轴为相机的光轴,并且与图像平面垂直。光轴与图像平面的交点即为图像坐标系的原点,由点O点与Xc,Yc,Zc轴所组成的直角坐标系称为相机坐标系,其中OOc为相机焦距。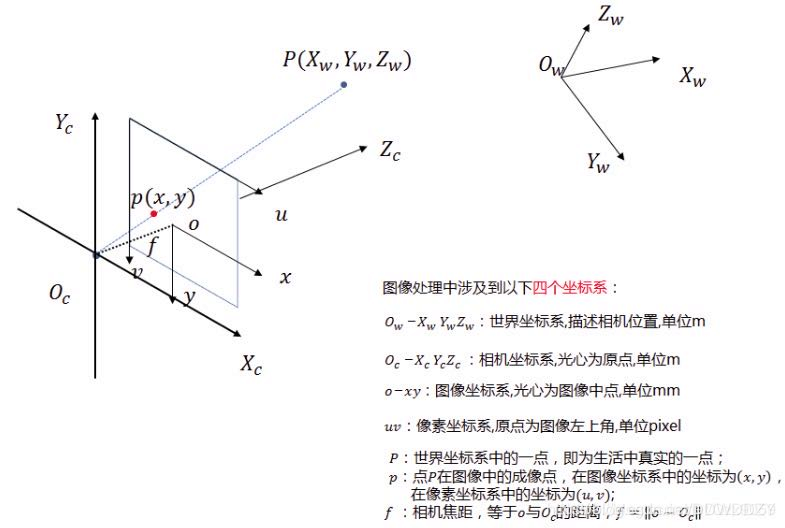 相机坐标系与世界坐标系之间的关系可以用旋转矩阵R与平移向量t来描述。假设空间中某一点P在世界坐标系与相机坐标系下的齐次坐标分别是(Xw,Yw,Zw,1)T与(Xc,Yc,Zc,1)T,则存在如下对应关系:
相机坐标系与世界坐标系之间的关系可以用旋转矩阵R与平移向量t来描述。假设空间中某一点P在世界坐标系与相机坐标系下的齐次坐标分别是(Xw,Yw,Zw,1)T与(Xc,Yc,Zc,1)T,则存在如下对应关系:
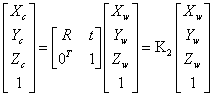
其中,K2矩阵包含了旋转矩阵和平移矩阵,这是将相机坐标下的坐标转化为世界坐标系的过程,由相机相对于世界坐标系的方位决定,因此称K2为外参矩阵维度为4*4。
