一、 激光雷达配置
1、 利用apollo系统配置
按照apollo官方教程进行操作(https://github.com/ApolloAuto/apollo/blob/r3.0.0/docs/specs/D-kit/Auto_Driving–Sensor_integration_cn.md),可能出现的问题记录如下:
- 接口通道
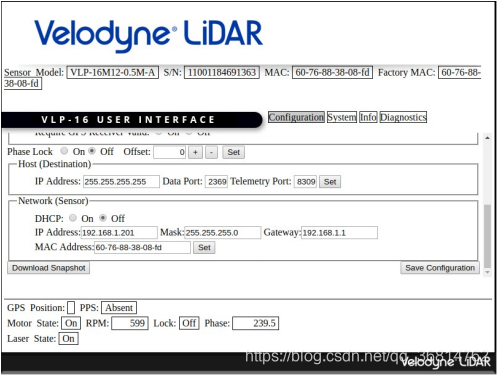
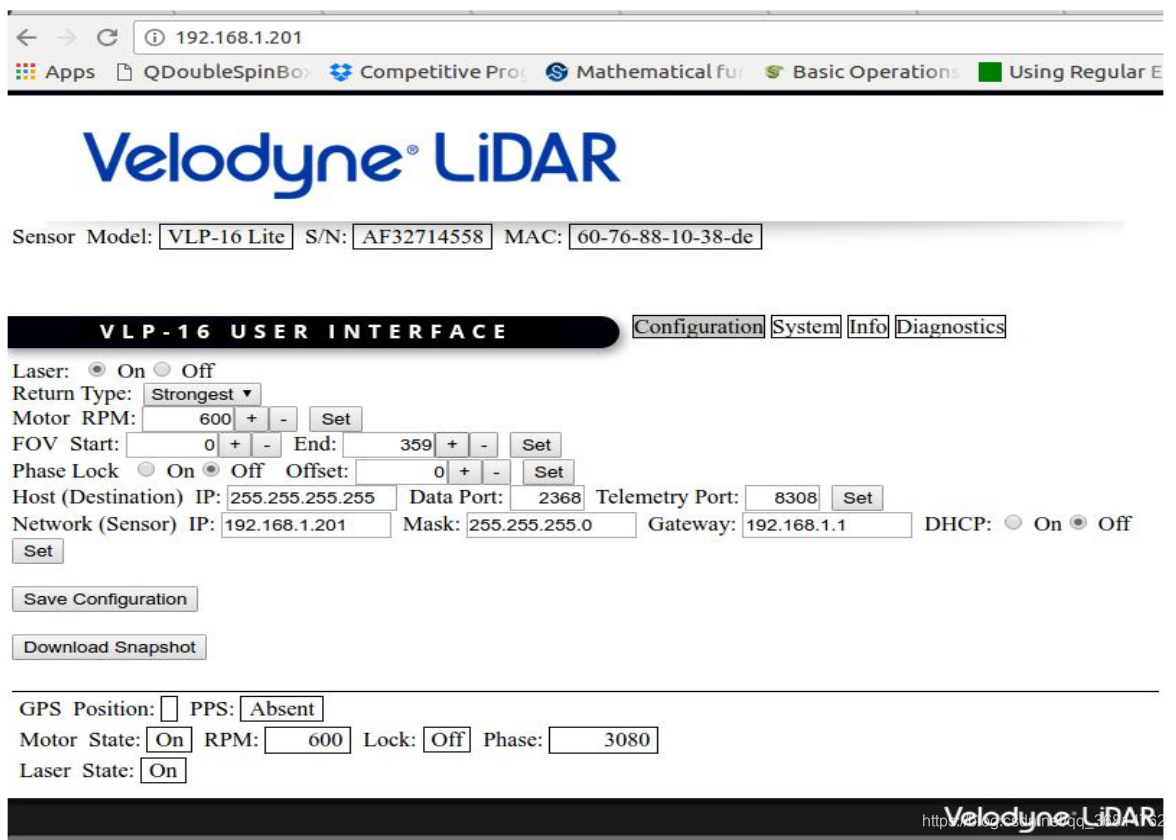
在apollo系统和ros系统下,激光雷达的通道口设置不同(apollo系统下:2369 8309 ,激光雷达原通道号:2368 8308),如果采用不同系统时,要注意在192.168.1.201下进行修改
2) Veloview
注意:下载veloview后要将其提取到apollo文件目录下,再运行bin文件启动veloview
2、 利用ros系统配置激光雷达
激光雷达数据传输网线暂时不连接
1)安装依赖项
打开终端
sudo apt-get install ros-VERSION-velodyne
VERSION:改为相应的ros版本,一般ubuntu14.04为indigo,16.04以上为kinetic
2)安装驱动
mkdir -p catkin_velodyne/src
cd catkin_velodyne/src
git clone https://github.com/ros-drivers/velodyne.git
cd ..
rosdep install --from-paths src --ignore-src --rosdistro kinetic -y
catkin_make
source ~/catkin_velodyne/devel/setup.bash
从附赠的U盘中复制出把Velodyne XML文件VeloView-VLP-16-HiRes.xml转成ROS节点的YAML文件
rosrun velodyne_pointcloud gen_calibration.py ~/桌面/VeloView-VLP-16-HiRes.xml
然后把生成的VeloView-VLP-16-HiRes.yaml复制到catkin_velodyne/src/velodyne/velodyne_pointcloud/params/目录下
然后修改catkin_velodyne/src/velodyne/velodyne_pointcloud/launch/VLP16_points.launch文件
把arg name=“calibration"的默认值修改为default=”$(find velodyne_pointcloud)/params/VLP16_hires_db.yaml",然后保存
3)拔掉网线,配置网络
插上数据连接网线
打开网络设置,对有线网络设置如下
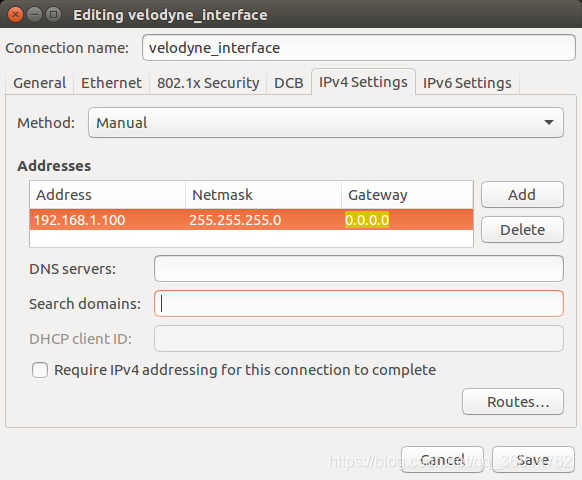
保存
2)打开浏览器页面,输入192.168.1.201,检查激光雷达配置信息,着重注意data port
4)运行roscore
roscore
5)加载
roslaunch velodyne_pointcloud VLP16_points.launch
6)显示实时点云
rosrun rviz rviz -f velodyne
然后在rviz中点Add,然后从topic选择points_cloud2。
