1、线程池
线程池是一种线程使用模式。线程过多会带来调度开销,进而影响缓存局部性和整体性能。而线程池维护着多个线程,等待着监督管理者分配可并发执行的任务。这避免了在处理短时间任务时创建与销毁线程的代价。线程池不仅能够保证内核的充分利用,还能防止过分调度。可用线程数量应该取决于可用的并发处理器、处理器内核、内存、网络sockets等的数量。
应用场景
- 需要大量的线程来完成任务,且完成任务的时间比较短。WEB服务器完成网页请求这样的任务,使用线程池技术是非常合适的。因为单个任务小,而任务数量巨大。但对于长时间的任务,比如一个Telnet连接请求,线程池的优点就不明显了。因为Telnet会话时间比线程的创建时间大多了。
- 对性能要求苛刻的应用,比如要求服务器迅速响应客户请求。
- 接受突发性的大量请求,但不至于使服务器因此产生大量线程的应用。突发性大量客户请求,在没有线程池情况下,将产生大量线程,虽然理论上大部分操作系统线程数目最大值不是问题,短时间内产生大量线程可能使内存到达极限出现错误。
线程池的实现
- 创建固定数量线程池,循环从任务队列中获取任务对象。
- 获取到任务对象后,执行任务对象中的任务接口。
#include<iostream>
#include<queue>
#include<pthread.h>
#include<unistd.h>
#include<time.h>
#define MAX_THREAD 10
typedef bool (*handler_t)(int);
using namespace std;
class ThreadTask
{
private:
int _data;
handler_t _handler;
public:
ThreadTask()
:_data(-1),_handler(nullptr)
{}
ThreadTask(int data, handler_t handler)
:_data(data),_handler(handler)
{}
void setTask(int data, handler_t handler)
{
_data = data;
_handler = handler;
}
void run()
{
_handler(_data);
}
};
class ThreadPool
{
private:
int _thread_max;
int _thread_cur;
bool _tp_quit;
queue<ThreadTask *> _task_queue;
pthread_mutex_t _lock;
pthread_cond_t _cond;
private:
void lockQueue()
{
pthread_mutex_lock(&_lock);
}
void unlockQueue()
{
pthread_mutex_unlock(&_lock);
}
void wakeUpOne()
{
pthread_cond_signal(&_cond);
}
void wakeUpAll()
{
pthread_cond_broadcast(&_cond);
}
void threadQuit()
{
--_thread_cur;
unlockQueue();
pthread_exit(nullptr);
}
void threadWait()
{
if(_tp_quit)
{
threadQuit();
}
pthread_cond_wait(&_cond, &_lock);
}
bool isEmpty()
{
return _task_queue.empty();
}
static void * thr_start(void * arg)
{
ThreadPool * tp = static_cast<ThreadPool *>(arg);
while(1)
{
tp->lockQueue();
while(tp->isEmpty())
{
tp->threadWait();
}
ThreadTask * tt;
tp->popTask(&tt);
tp->unlockQueue();
tt->run();
delete tt;
}
return nullptr;
}
public:
ThreadPool(int max = MAX_THREAD)
:_thread_max(max),
_thread_cur(max),
_tp_quit(false)
{
pthread_mutex_init(&_lock, nullptr);
pthread_cond_init(&_cond, nullptr);
}
~ThreadPool()
{
pthread_mutex_destroy(&_lock);
pthread_cond_destroy(&_cond);
}
bool poolInit()
{
pthread_t tid;
for(int i = 0; i < _thread_max; ++i)
{
int ret = pthread_create(&tid, nullptr, thr_start, this);
if(ret != 0)
{
cout<<"create thread pool error..."<<endl;
return false;
}
}
return true;
}
bool pushTask(ThreadTask * tt)
{
lockQueue();
if(_tp_quit)
{
unlockQueue();
return false;
}
_task_queue.push(tt);
wakeUpOne();
unlockQueue();
return true;
}
bool popTask(ThreadTask ** tt)
{
*tt = _task_queue.front();
_task_queue.pop();
return true;
}
bool poolQuit()
{
lockQueue();
_tp_quit = true;
unlockQueue();
while(_thread_cur > 0)
{
wakeUpAll();
sleep(1);
}
return true;
}
};
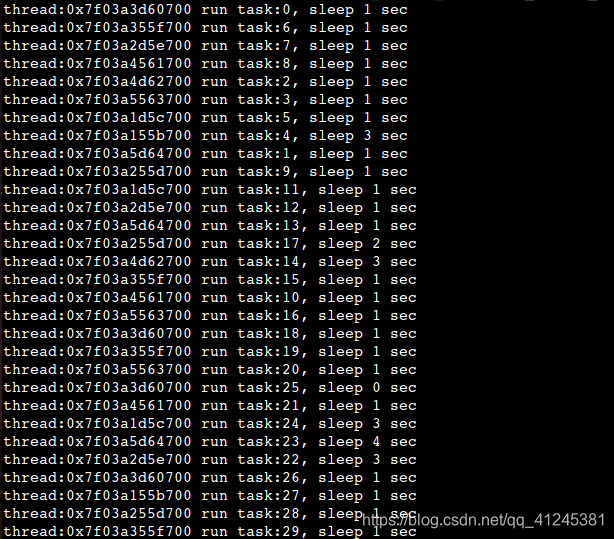
bool handler(int data)
{
srand((unsigned int)time(nullptr));
int n = rand() % 5;
printf("thread:%p run task:%d, sleep %d sec\n", pthread_self(), data, n);
sleep(n);
return true;
}
int main()
{
int i;
ThreadPool pool;
pool.poolInit();
for(int i = 0; i < 30; ++i)
{
ThreadTask * tt = new ThreadTask(i, handler);
pool.pushTask(tt);
}
pool.poolQuit();
return 0;
}
2、线程安全的单例模式
单例模式是一种"经典的,常用的"设计模式。某些类只应该具有一个实例对象,称为单例。在很多服务器开发场景中,经常需要让服务器加载很多的数据到内存中,此时往往要用一个单例的类来管理这些数据。
懒汉方式核心思想是"延时加载",从而优化服务器的启动速度。饿汉模式核心思想是"启动时加载"。参见:单例模式
饿汉模式
template<class T>
class singleton
{
public:
static T _data;
public:
static T * getInstance()
{
return &_data;
}
};
只要调用此类创建对象,则一个进程中只有一个对象的实例。
懒汉模式
template<class T>
class singleton
{
public:
static T * _data;
public:
static T * getInstance()
{
if(_data = nullptr)
{
_data = new T();
}
return _data;
}
};
第一次调用getInstance()的时候,如果两个线程同时调用,可能会创建出两份对象的实例,造成线程不安全。
线程安全的懒汉模式
template<class T>
class singleton
{
public:
volatile static T * _data;//volatile:防止编译器优化
static std::mutex _lock;
public:
static T * getInstance()
{
if(_data = nullptr)
{
_lock.lock();
if(_data == nullptr)//双重判空,降低锁冲突效率,提高性能
{
_data = new T();
}
_lock.unlock();
}
return _data;
}
};
注:双重判空,避免不必要的锁竞争;volatile关键字防止编译器优化
3、STL、智能指针与线程安全
STL容器不是线程安全的。STL的设计是为了将性能挖掘到极致,而一旦涉及到加锁保证线程安全,会对性能造成巨大的影响。而且对于不同的容器,加锁方式的不同,性能可能也不同。因此STL默认不是线程安全的。如果需要在多线程环境下使用,需要调用者自行保证线程安全。
智能指针是线程安全的。对于unique_ptr,由于只是在当前代码块范围内生效,因此不涉及线程安全问题。对于shared_ptr,多个对象需要共用一个引用计数变量,所以会存在线程安全问题。但是标准库实现的时候考虑到了这个问题,基于原子操作(CAS)的方式保证shared_ptr能够高效、原子的操作引用计数。
4、其他锁
悲观锁:在每次取数据时,总是担心数据会被其他线程修改,所以会在取数据前先加锁(读锁、写锁、行锁等),当其他线程想要访问数据时,被阻塞挂起。
乐观锁:每次取数据时候,总是乐观的认为数据不会被其他线程修改,因此不上锁。但是在更新数据前,会判断其他数据在更新前有没有对数据进行修改。
CAS操作:当需要更新数据时,判断当前内存值和之前取得的值是否相等。如果相等则用新值更新。若不等则失败,失败则重试,一般是一个自旋的过程,即不断重试。
