一、 USART简介
USART即通用同步异步收发器,它能够灵活地与外部设备进行全双工 数据交换,满足外部设备对工业标准 NRZ 异步串行数据格式的要求。 UART即通用异步收发器,它是在USART基础上裁剪掉了同步通信功能,同 步和异步主要看其时钟是否需要对外提供,这个前面也介绍了。我们开 发板上使用的STM32F103ZET6芯片含有3个USART,2个UART外设。它们都 具有串口通信功能,USART它支持同步单向通信和半双工单线通信;还支 持 LIN(域互连网络)、智能卡协议与 IrDA(红外线数据协会) SIR ENDEC 规范,以及调制解调器操作 (CTS/RTS)。而且,它还支持多处理 器通信和DMA功能,使用 DMA 可实现高速数据通信。USART 通过小数波 特率发生器提供了多种波特率。 USART在STM32中应用最多的是printf输出调试信息,当我们需要了解 程序内的一些变量数据信息时,可以通过printf输出函数将这些信息打 印到串口助手上显示,这样一来就给我们调试程序带来了极大的方便。
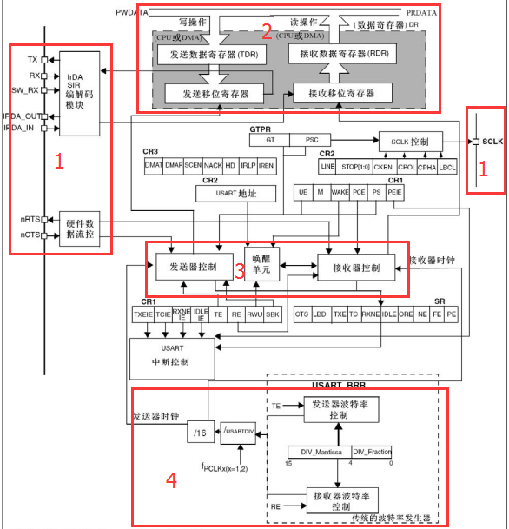
二、 USART结构框图
参考《STM32F10x中文参考手册》25章内容
三、串口通信配置步骤
(1)使能串口时钟及GPIO端口时钟
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA,ENABLE); //使能GPIOA时钟 RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1,ENABLE);//使能USART1时钟
(2)GPIO端口模式设置,设置串口对应的引脚为复用功能
GPIO_InitStructure.GPIO_Mode=GPIO_Mode_AF_PP; GPIO_InitStructure.GPIO_Mode=GPIO_Mode_IN_FLOATING;
(3)初始化串口参数,包含波特率、字长、奇偶校验等参数
USART_Init(USART_TypeDef* USARTx, USART_InitTypeDef* USART_InitStruct);
(4)使能串口
USART_Cmd(USART_TypeDef* USARTx, FunctionalState NewState);
举例:USART_Cmd(USART1, ENABLE); //使能串口1
(5)设置串口中断类型并使能(使能在4中)
USART_ITConfig(USART_TypeDef* USARTx, uint16_t USART_IT, FunctionalState NewState);
举例:USART_ITConfig(USART1, USART_IT_RXNE, ENABLE);//开启接收中断
USART_ITConfig(USART1,USART_IT_TC, ENABLE);
对应的串口中断类型可在stm32f10x_usart.h中查找到
(6)设置串口中断优先级,使能串口中断通道
NVIC初始化库函数是NVIC_Init()
(7)编写串口中断服务函数
USART1_IRQHandler
ITStatus USART_GetITStatus(USART_TypeDef* USARTx, uint16_t USART_IT);
if(USART_GetITStatus(USART1, USART_IT_RXNE) != RESET) //是否得到中断标志位
{
...//执行USART1接收中断内控制
}
USART_ClearFlag(USART_TypeDef* USARTx, uint16_t USART_FLAG); // 清除中断标志位
第二个参数为状态标志选项,可选参数可在stm32f10x_usart.h中查找到
usart.h文件
1 #ifndef __usart_H
2 #define __usart_H
3
4 #include "system.h"
5
6
7 void USART1_Init(u32 bound);
8
9
10 #endif
usart.c文件
1 #include "usart.h"
2
3 /*******************************************************************************
4 * 函 数 名 : USART1_Init
5 * 函数功能 : USART1初始化函数
6 * 输 入 : bound:波特率
7 * 输 出 : 无
8 *******************************************************************************/
9 void USART1_Init(u32 bound)
10 {
11 //GPIO端口设置
12 GPIO_InitTypeDef GPIO_InitStructure;
13 USART_InitTypeDef USART_InitStructure;
14 NVIC_InitTypeDef NVIC_InitStructure;
15
16 RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA,ENABLE);
17 RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1,ENABLE);
18
19
20 /* 配置GPIO的模式和IO口 */
21 GPIO_InitStructure.GPIO_Pin=GPIO_Pin_9;//TX //串口输出PA9
22 GPIO_InitStructure.GPIO_Speed=GPIO_Speed_50MHz;
23 GPIO_InitStructure.GPIO_Mode=GPIO_Mode_AF_PP; //复用推挽输出
24 GPIO_Init(GPIOA,&GPIO_InitStructure); /* 初始化串口输入IO */
25 GPIO_InitStructure.GPIO_Pin=GPIO_Pin_10;//RX //串口输入PA10
26 GPIO_InitStructure.GPIO_Mode=GPIO_Mode_IN_FLOATING; //模拟输入
27 GPIO_Init(GPIOA,&GPIO_InitStructure); /* 初始化GPIO */
28
29
30 //USART1 初始化设置
31 USART_InitStructure.USART_BaudRate = bound;//波特率设置
32 USART_InitStructure.USART_WordLength = USART_WordLength_8b;//字长为8位数据格式
33 USART_InitStructure.USART_StopBits = USART_StopBits_1;//一个停止位
34 USART_InitStructure.USART_Parity = USART_Parity_No;//无奇偶校验位
35 USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None;//无硬件数据流控制
36 USART_InitStructure.USART_Mode = USART_Mode_Rx | USART_Mode_Tx; //收发模式
37 USART_Init(USART1, &USART_InitStructure); //初始化串口1
38
39 USART_Cmd(USART1, ENABLE); //使能串口1
40
41 USART_ClearFlag(USART1, USART_FLAG_TC);
42
43 USART_ITConfig(USART1, USART_IT_RXNE, ENABLE);//开启相关中断
44
45 //Usart1 NVIC 配置
46 NVIC_InitStructure.NVIC_IRQChannel = USART1_IRQn;//串口1中断通道
47 NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority=3;//抢占优先级3
48 NVIC_InitStructure.NVIC_IRQChannelSubPriority =3; //子优先级3
49 NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; //IRQ通道使能
50 NVIC_Init(&NVIC_InitStructure); //根据指定的参数初始化VIC寄存器、
51 }
52
53 /*******************************************************************************
54 * 函 数 名 : USART1_IRQHandler
55 * 函数功能 : USART1中断函数
56 * 输 入 : 无
57 * 输 出 : 无
58 *******************************************************************************/
59 void USART1_IRQHandler(void) //串口1中断服务程序
60 {
61 u8 r;
62 if(USART_GetITStatus(USART1, USART_IT_RXNE) != RESET) //接收中断
63 {
64 r =USART_ReceiveData(USART1);//(USART1->DR); //读取接收到的数据
65 USART_SendData(USART1,r);
66 while(USART_GetFlagStatus(USART1,USART_FLAG_TC) != SET);
67 }
68 USART_ClearFlag(USART1,USART_FLAG_TC);
69 }
main文件
1 #include "system.h"
2 #include "SysTick.h"
3 #include "led.h"
4 #include "usart.h"
5
6 int main()
7 {
8 u8 i=0;
9 SysTick_Init(72);
10 NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2); //中断优先级分组 分2组
11 LED_Init();
12 USART1_Init(9600);
13
14 while(1)
15 {
16 i++;
17 if(i%20==0)
18 {
19 led1=!led1;
20 }
21 delay_ms(10);
22 }
23 }