文章目录
0 写在前面
材料源自某高校课程ppt,恕不共享
1 简介
马尔可夫决策过程(Markov Decision Processes, MDP) 是RL中的一个基本理论,它为RL较为公式化地描述了一个environment(以下简称env),这个env比较理想化,是fully observable(即环境的所有变化对智能体agent可见)。
值得一提的是,所有RL问题都可以是MDP问题:
- Optimal control primarily deals with continuous MDPs
- Partially observable problems can be converted into MDPs
- Bandits(老虎机问题) are MDPs with one state
2 马尔可夫属性
MDP形式上类似数字电路中的状态机,即状态的转换过程,能够构成MDP的状态称之为具有马尔可夫属性,以下简称M属性。定义如下:

上述的数学含义是
在
下的条件概率与在
并集下的概率相等,即The future is independent of the past given the present(未来的状态只与当前状态有关)。
3 State Transition Matrix
在MDP中,当前状态可以在下一步转换到自身状态,也可能转换到其他状态,例如总共3个状态,处于状态1即
时,转到自身或其他状态
和
的概率分别是0.2,0.4,0.4,注意这里的概率和自然等于1。这种转换过程需要用state transition probability来描述:

即状态为
条件下,下一步状态为
的概率。
对于n个状态的情况下,把每个state transition probability凑到一起就成了State Transition Matrix:
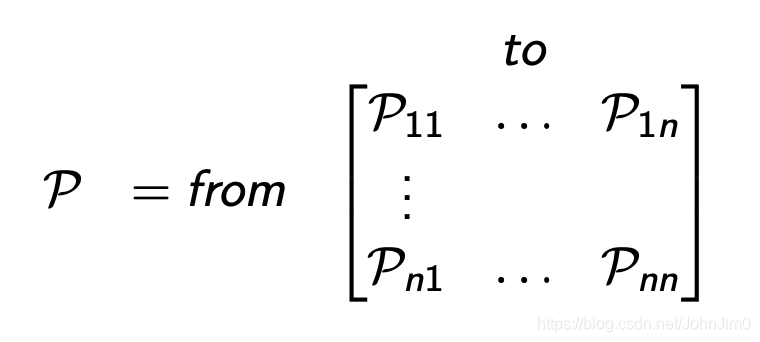
忽略图中的from和to(懒得改了),其中根据上面转换到所有状态的概率和为1,矩阵每行的元素之和也等于1。
4 MP
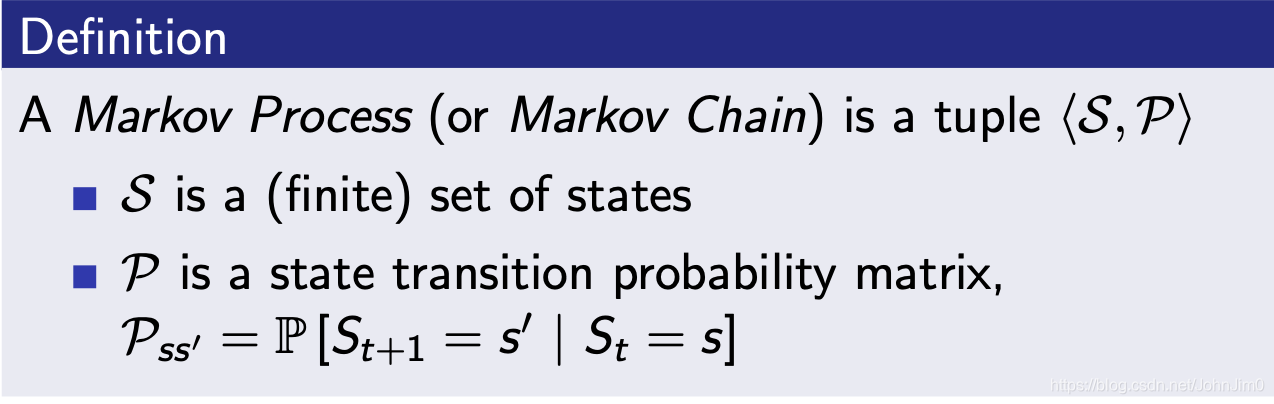
马尔可夫过程(MP)是一个无记忆的随机过程:
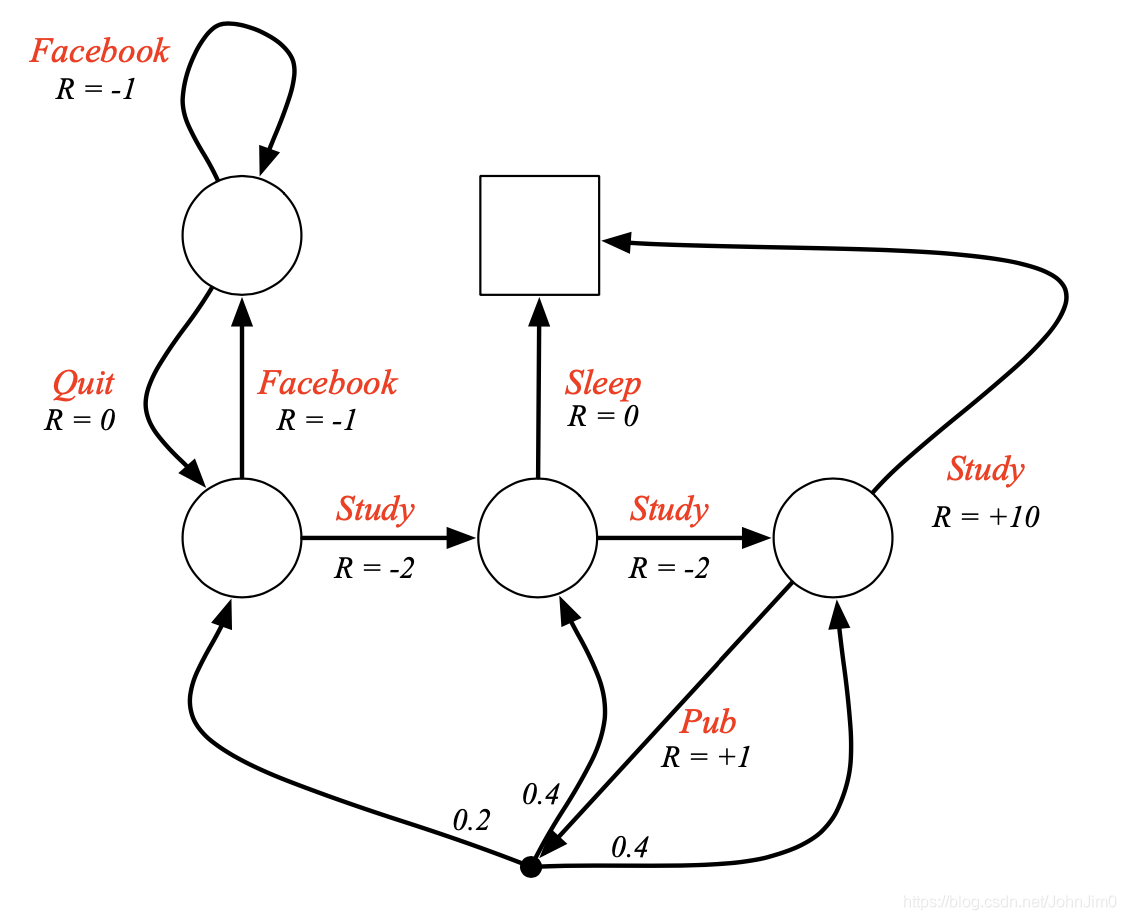
5 示例:Student Markov Chain
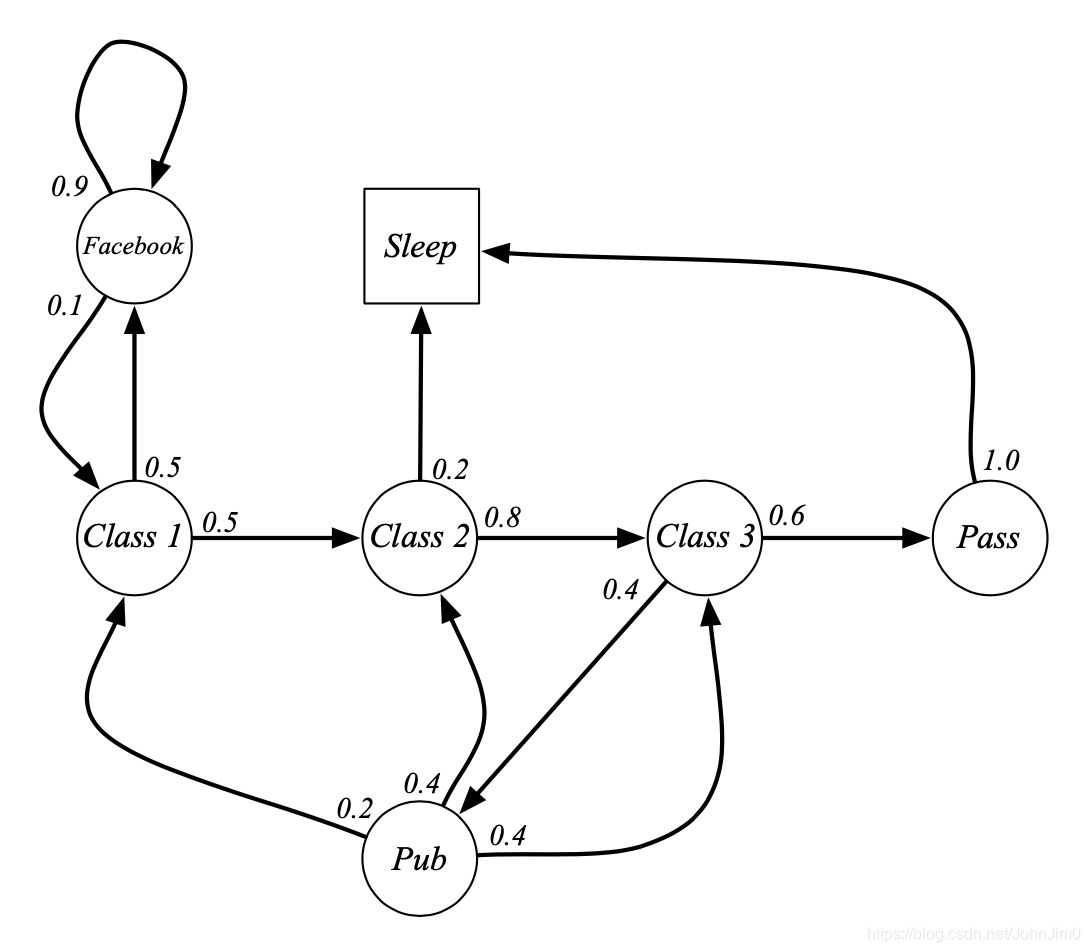
如图是一个学生状态的马尔可夫过程或者说马尔可夫链,图中的意思是,假如学生在上class 1,那么结束class 1后有0.5的概率继续上class 2,也有0.5的概率会去刷facebook,注意这里有一个终止状态,即sleep,进入sleep之后不再跳转,也如定义中所说的
是一个(finite) set of states。
假设我们的初始状态是class 1(C1),它最终是会进入终止状态sleep(当前也可能不会而变成一个循环状态)的,可能的情况有很多种:
- C1 C2 C3 Pass Sleep
- C1 FB FB C1 C2 Sleep
- C1 FB FB C1 C2 C3 Pub C1 FB FB FB C1 C2 C3 Pub C2 Sleep
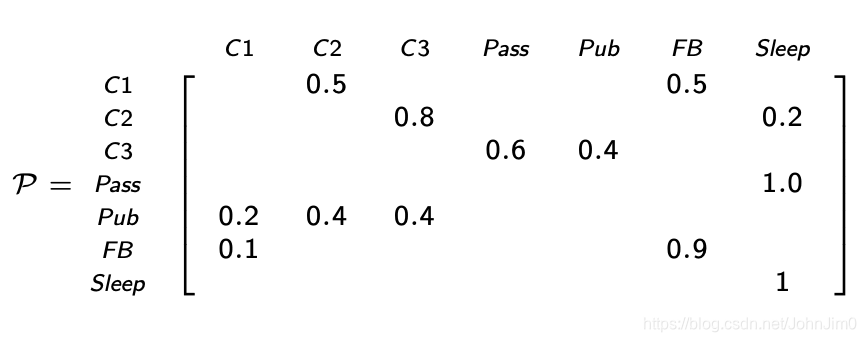
这里的每一种情况一般称为一个回合(episode)。那么这里我们就可以描述它的 State Transition Matrix了,如下:
6 Markov Reward Process
仅仅有上面的过程还不足以做出决策,RL本质上是一个基于reward的过程,我们需要引入reward,定义如下:
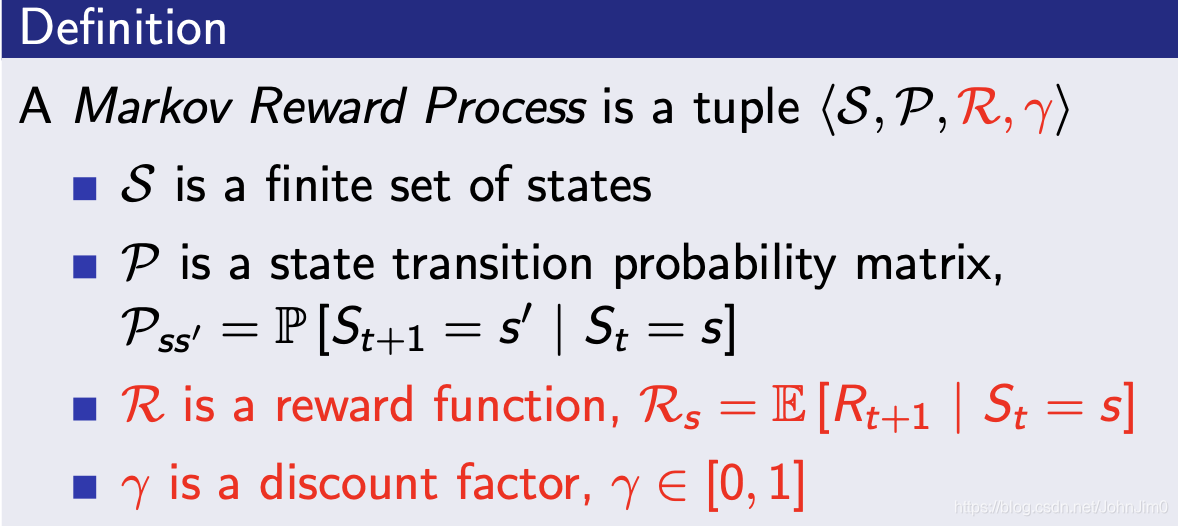
在Student Markov Chain示例中,则可以表示为:
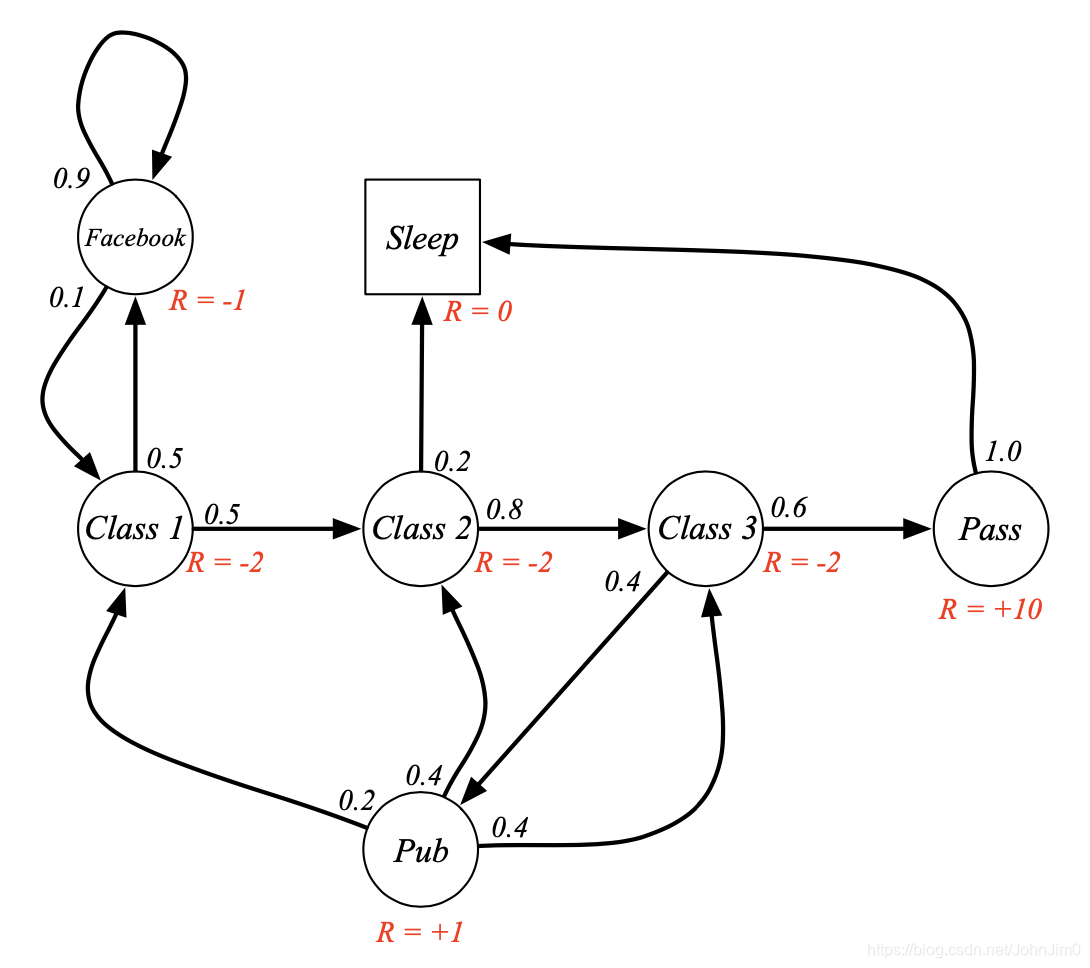
即比如当我们进入状态class 1时,就给一个-2的奖励,这个奖励可以是人为规定的。
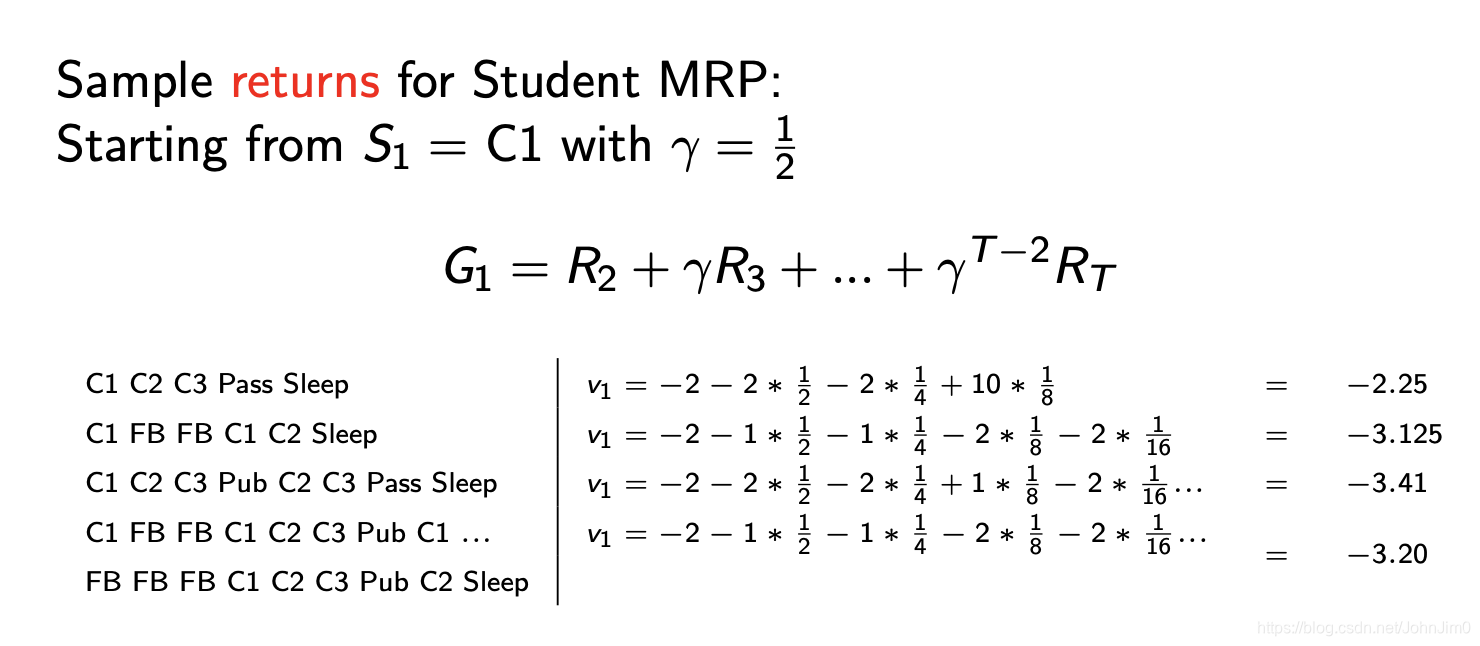
7 Return
在一个**回合(episode)**中,我们每完成一个状态就给一个奖励,回合结束时将奖励累积起来就是最终的回报(return),如下:
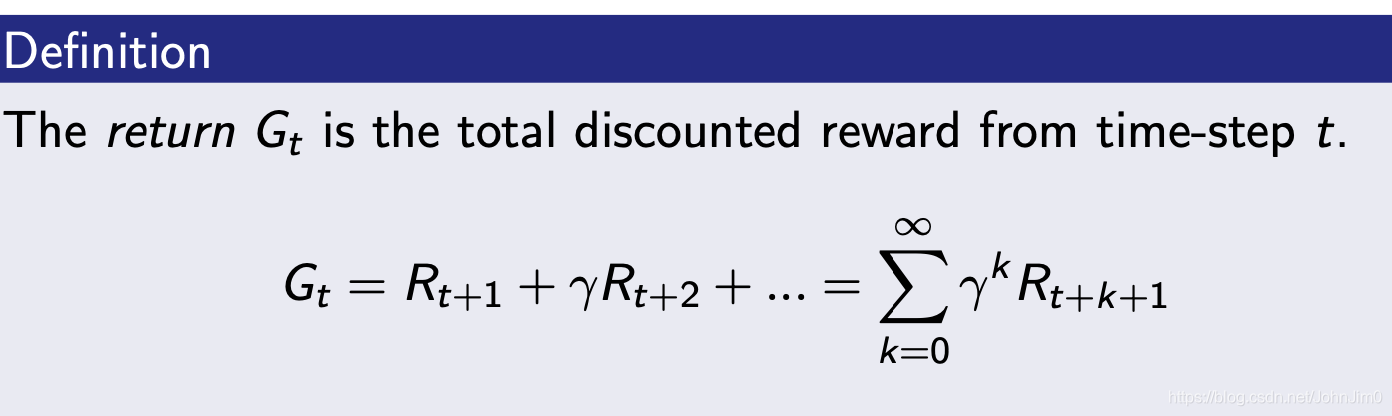
这里引入了一个衰减因子
,它在0-1范围之间,它的基本意义如下:

8 为什么需要衰减?
大多数MDP都会有这个衰减因子,原因如下:
- 便于数学计算
- 避免循环马尔可夫过程中的return成无限大的值
- 没有衰减,未来的不确定性可能不能很好地表示出来
- If the reward is financial, immediate rewards may earn more interest than delayed rewards
- Animal/human behaviour shows preference for immediate reward
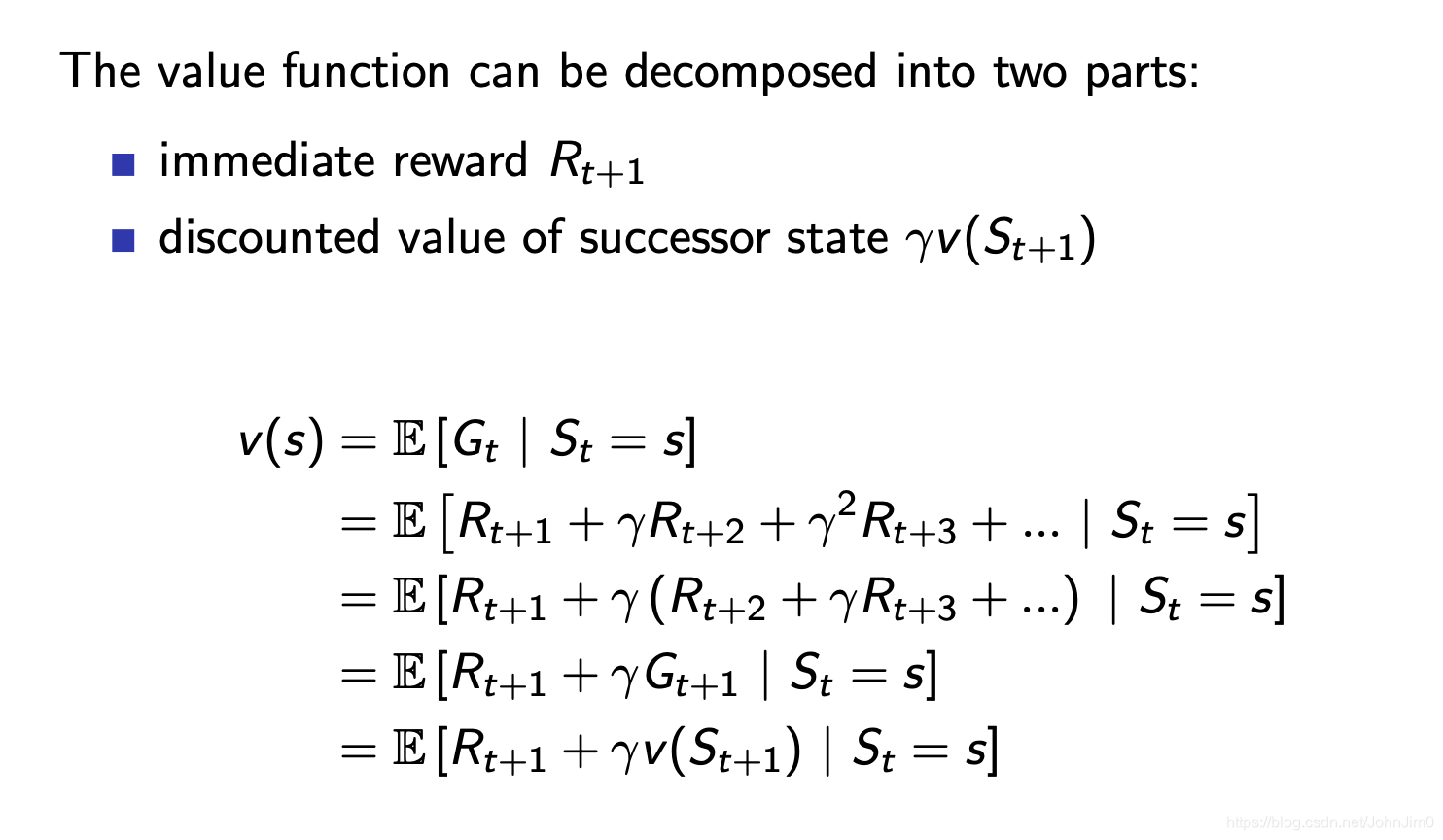
9 MRP的值函数
value function(值函数)是用来表示某个状态的长期价值的。
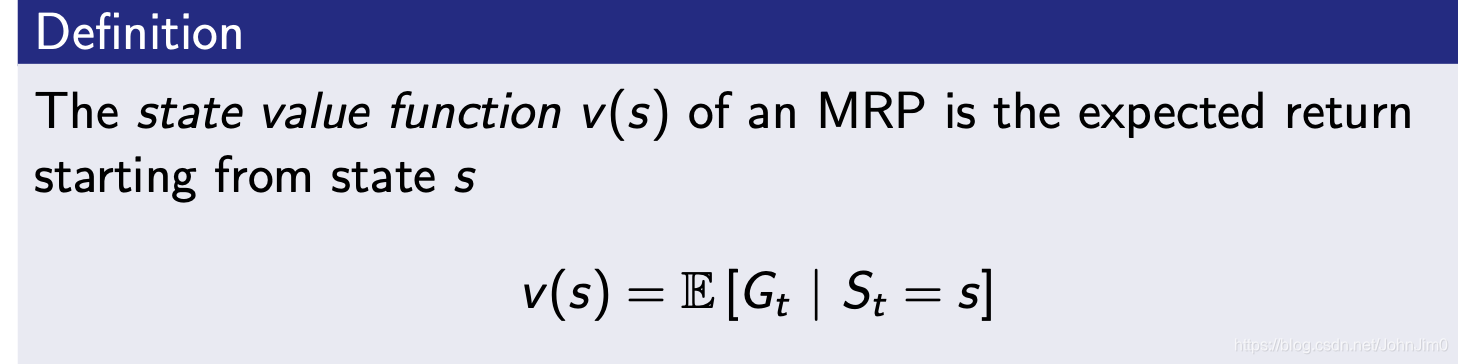
如下:
上面可以看出不同情况下或者说不同的episode,每个状态的value不同的,我们value function计算的是期望值,但是由于每个状态的episode很多,显然不方便直接列举计算,而贝尔曼方程给出了答案。
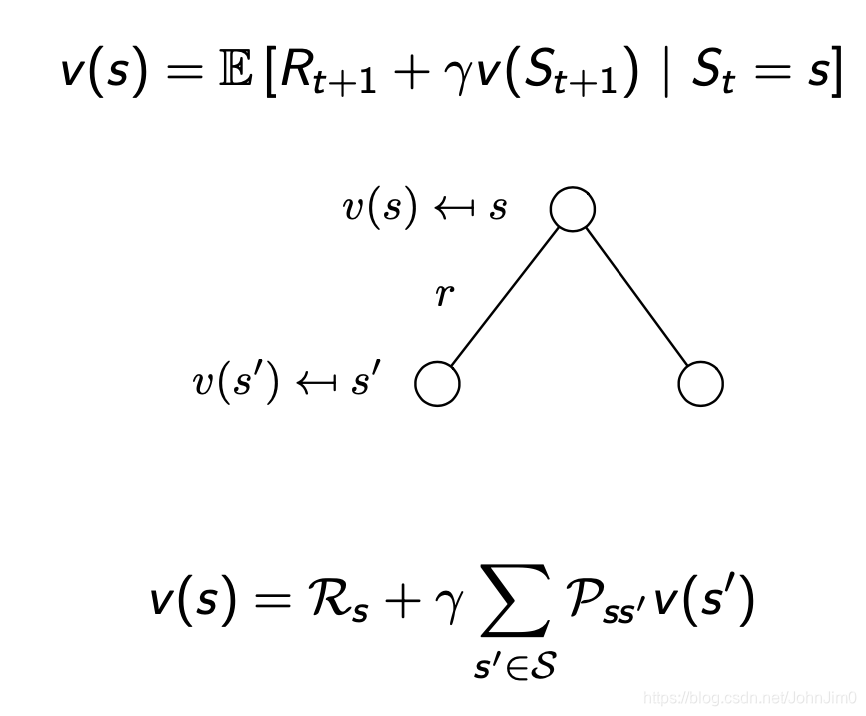
10 贝尔曼方程
贝尔曼方程给出了值函数的求解,
即当前状态的值
等于完成当前状态的奖励
以及下一步各状态的值的衰减和的期望。
示例如下:
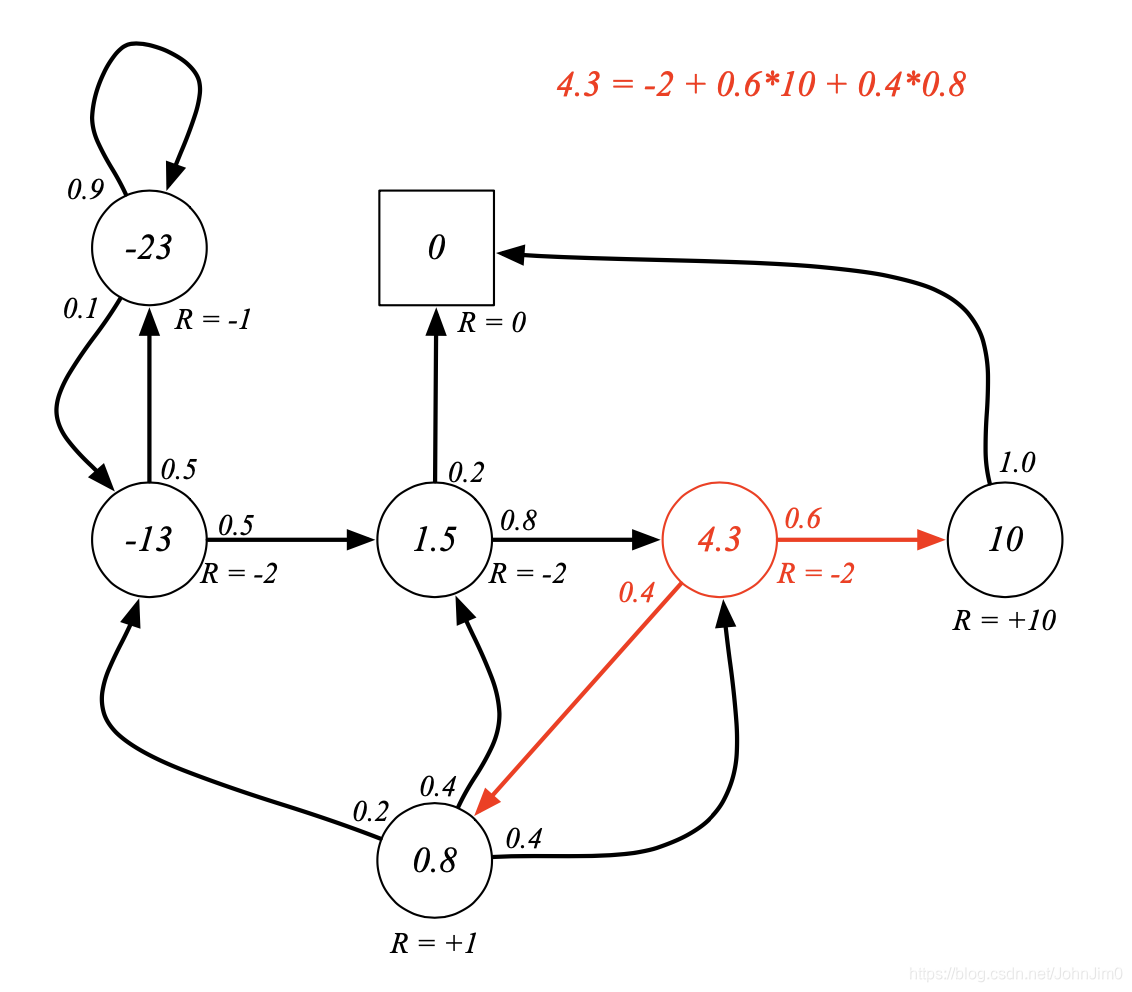
如图这里
,下一个状态有两个,对应的概率分别为0.6和0.4,值分别为10和8,注意这里的衰减因子
。
此时会产生一个问题,这里的10和8又是怎么来的呢?我们需要从终止状态算起,首先看终止状态即
的状态,因为没有下一个状态,且
,所以对应的value也等于0,然后再找与终止状态相邻并且简单的状态,即
的那个,因为它的下一个状态只有终止状态,所以也容易得出它的value=10,计算其他的可能就需要设未知数求解了,这是笔者想到的第一个比较自然的高中数学思路,其实用矩阵表示的话计算会更加简单,也能适用于更为复杂的情况,见下一节。
11 贝尔曼方程的数学表示
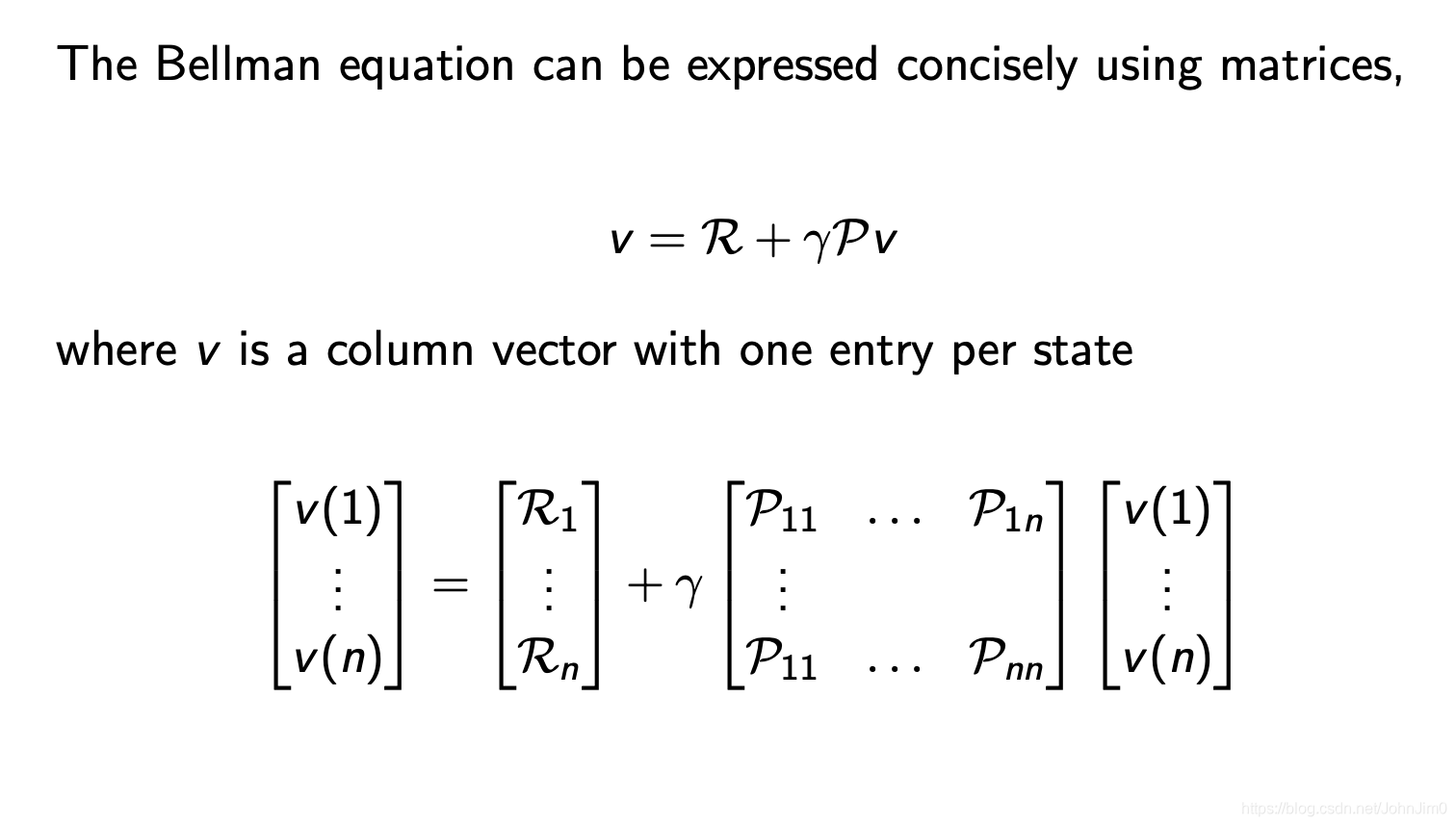
根据上面一节,不难写出贝尔曼方程的矩阵表示形式,可以看到包含了所有状态之后,这里不再有
和
的区分,而都变成了
,这就是所谓的数学之美!,有了这个计算value就简单多了,如下:
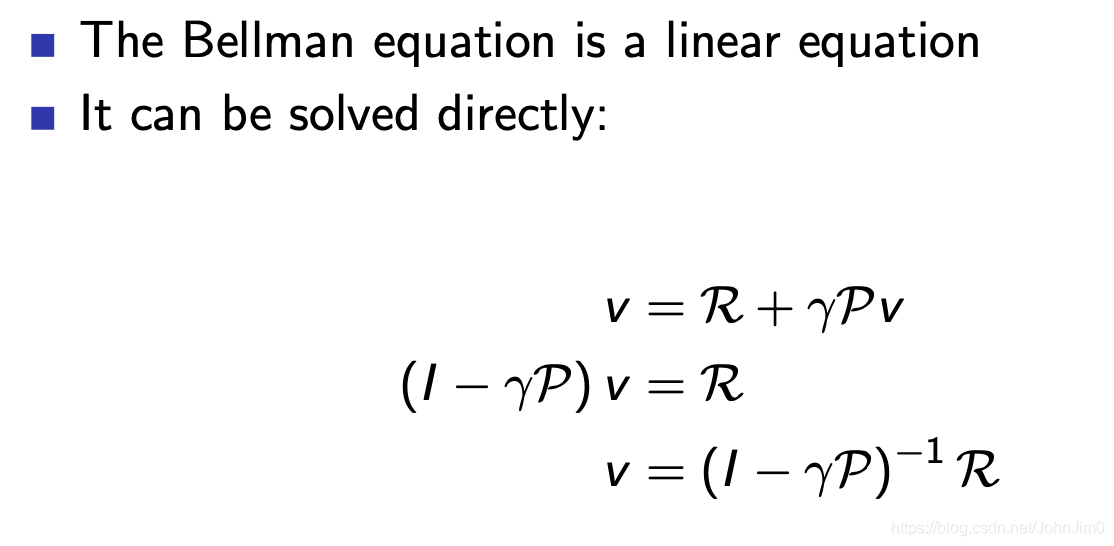
当然说简单也不简单,这里涉及到逆矩阵,对于简单的MDP可以计算得出,对于复杂的就需要用到其他各种各样的方法,比如:
- Dynamic programming
- Monte-Carlo evaluation
- Temporal-Difference learning
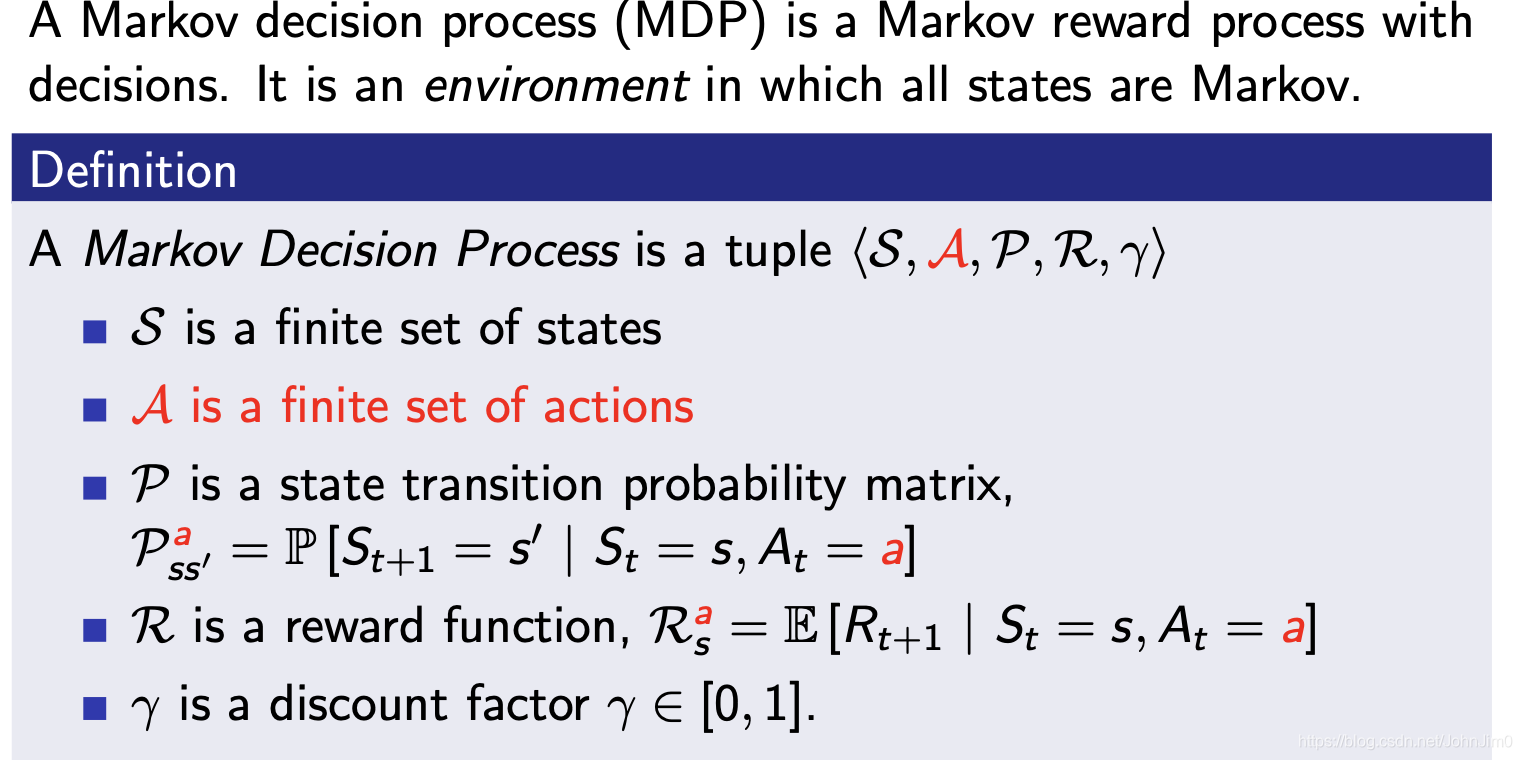
12 MDP
上面描述了Markov Process和Markov Reward Process,这次我们再引入一个action,就成了一个完备的MDP了,如下:
还是以学生作为示例,图中的红字就是action,注意跟状态state有区别:
13 Policy
policy即策略,RL最终就是要找到一个最优策略来达到比如回报最大的目标,数学定义如下:

即它是状态为s条件下的a的概率分布,注意policy是描述智能体agent的行为的,它只依赖于当前的状态。
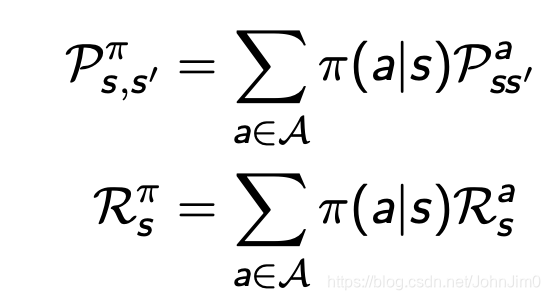
总结一下就是对于一个MDP即
和策略
,一个状态序列(state sequence)
或者说一个回合(episode)就是一个马尔可夫过程
,一个状态奖励序列
就是Markov Reward Process
,并且:
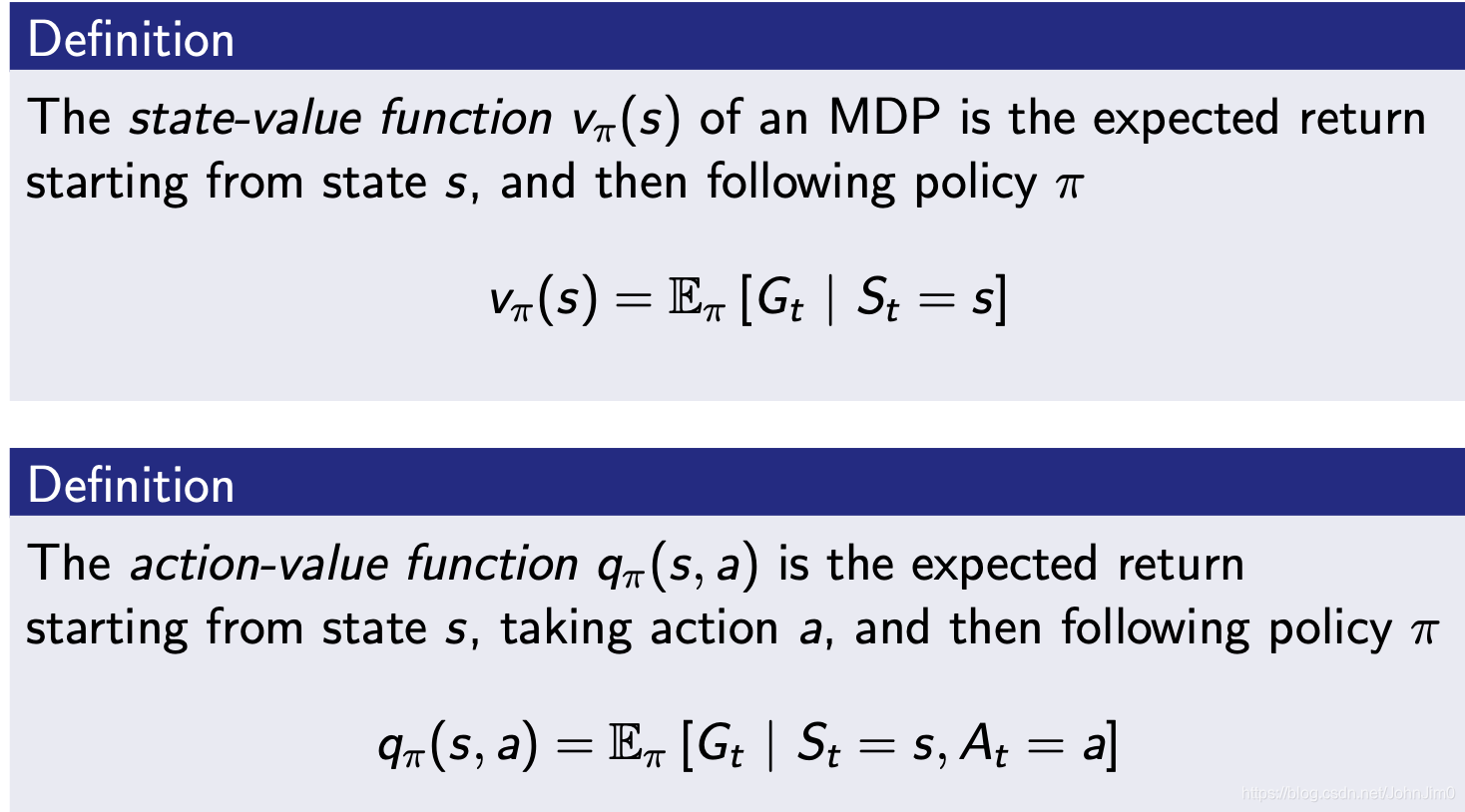
14 MDP的值函数
MDP的值函数分为状态-值函数和动作-值函数,如下:
注意v跟q的关系如下:
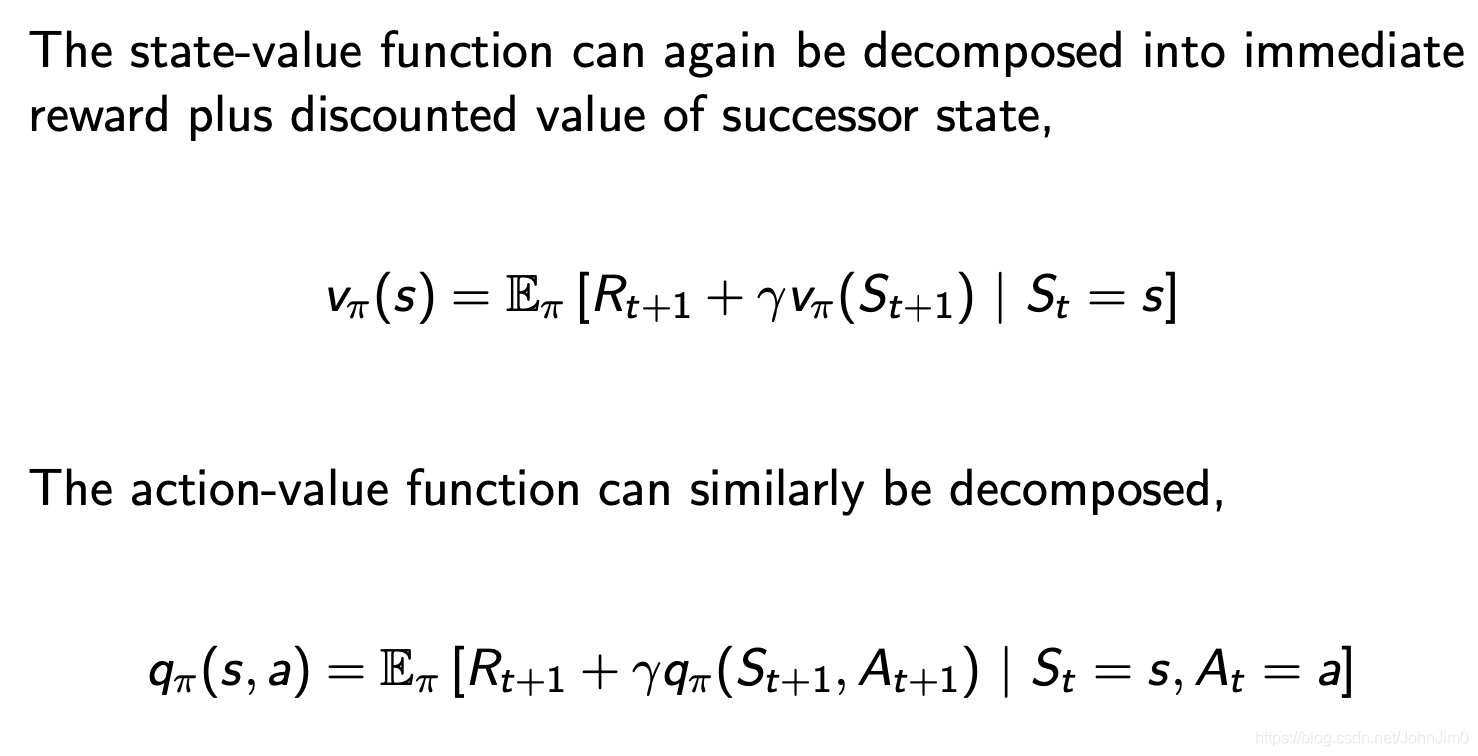
与上面MRP的值函数类似,我们依然需要用到贝尔曼方程计算每个状态的期望价值,这里使用q表示value,经典算法q-learning的q也是这个q:
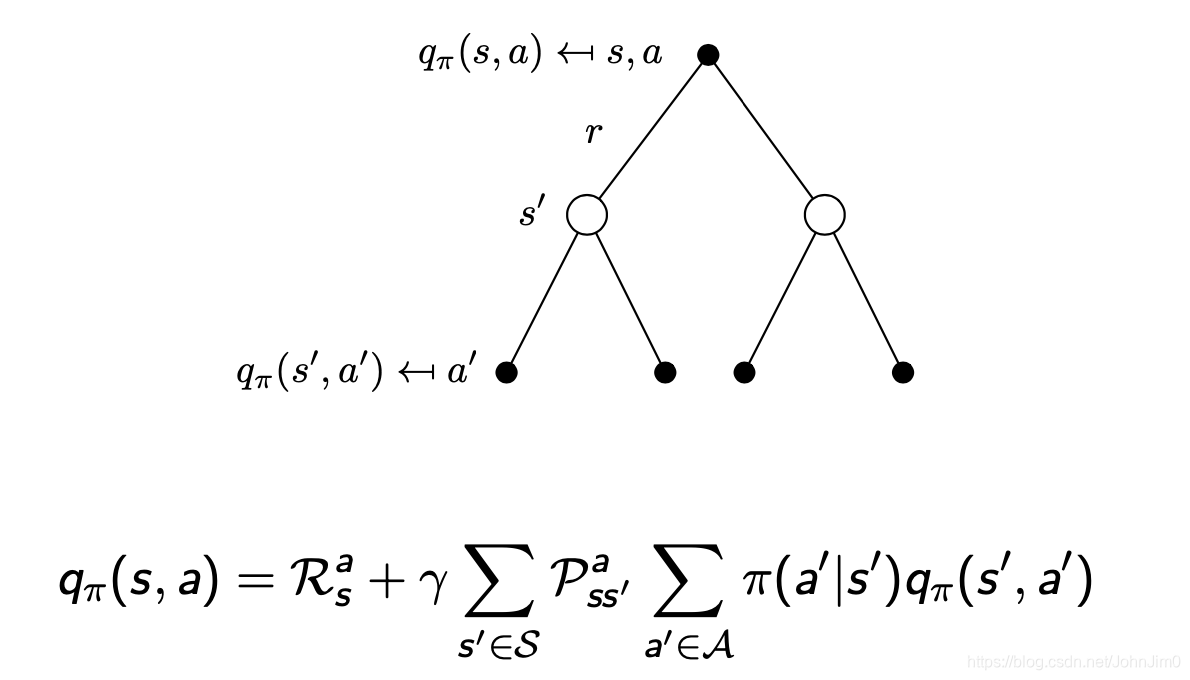
注意这里的
和
一般是常量,这里取
和7.4状态下的
,以学生为例:
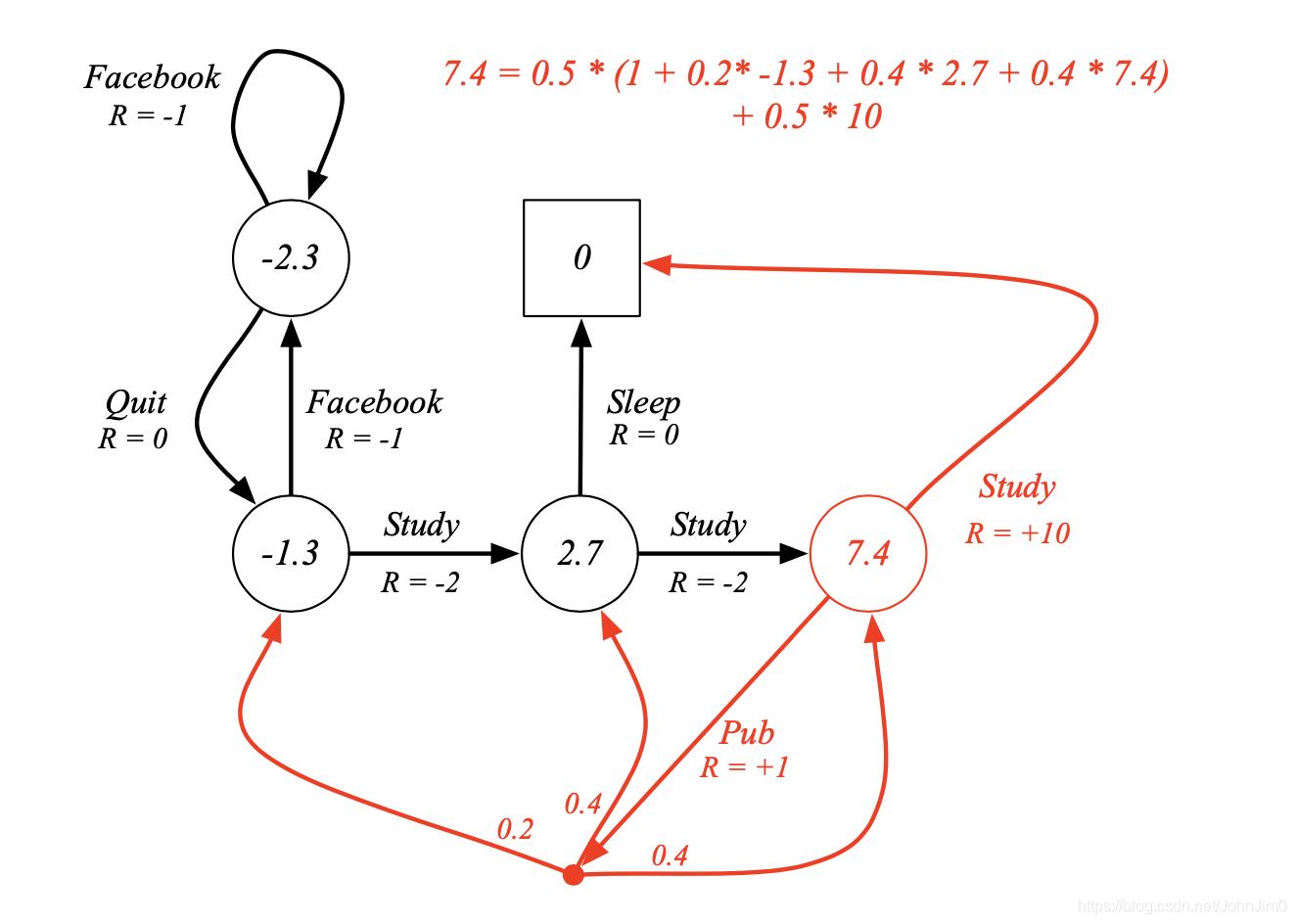
以7.4(这个是v值而不是q)这个状态为例,对于这个状态它有两种可能的行为即study和pub,study之后对应的只有0的那个状态,pub之后可能有三种状态,先计算study这个动作对应的q值,首先完成study之后对应的奖励为10,因为下一步的v值即这里的
等于0,所以study对应的
等于10,再计算pub对应的q值,易知奖励为1,第二项
,两个q值相加再乘以
即可。
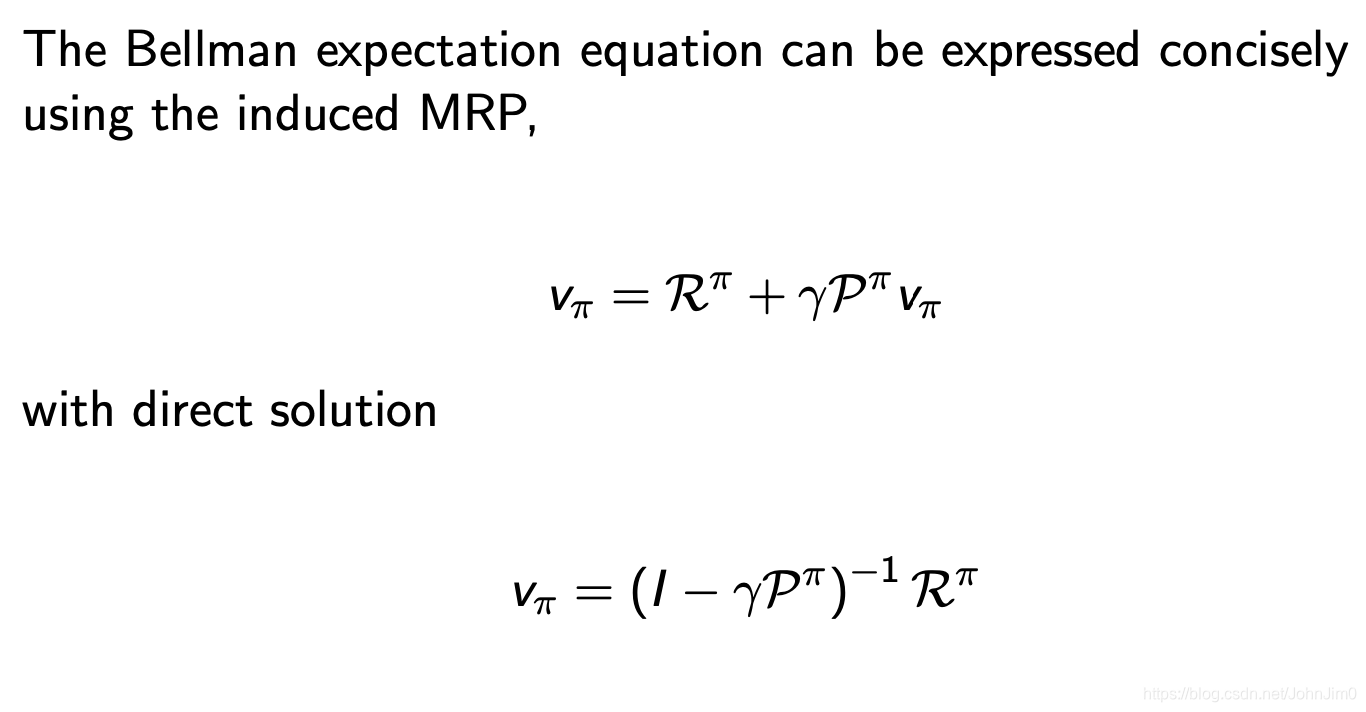
前面也提到这种计算方法不适用于复杂情况,因此同样的对应的贝尔曼方程的矩阵表示如下:
15 最优值函数
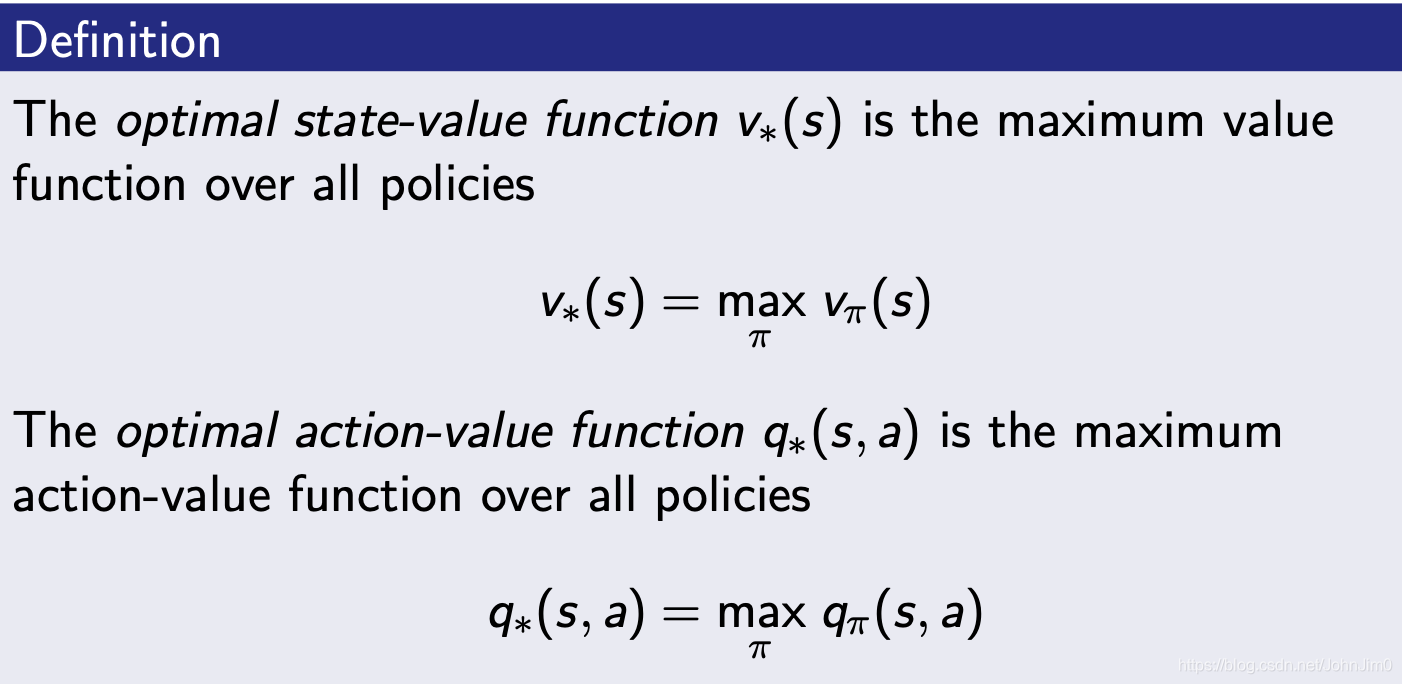
我们定义最优值函数即对应的value达到最大,也是MDP的最优解。
16 最优策略
对于智能体agent我们则需要知道最优策略,最优策略即最优值函数下对应的策略,如下:
对于任意MDP,定论如下:
- 必然存在最优策略,可能不止一个
- 最优策略对应的state-value function值(简称v值)最大
- 最优策略对应的action-value function(q值)最大
17 寻找最优策略
一个简单的最优策略可以通过找到每步最大的q值得出,如下:
如下:

注意这里圆圈里面的值不是之前的v值而是q值,这里设facebook那里为起始状态,那么最优化策略就是图中的红线,即每次选择使q值最大的状态和动作。
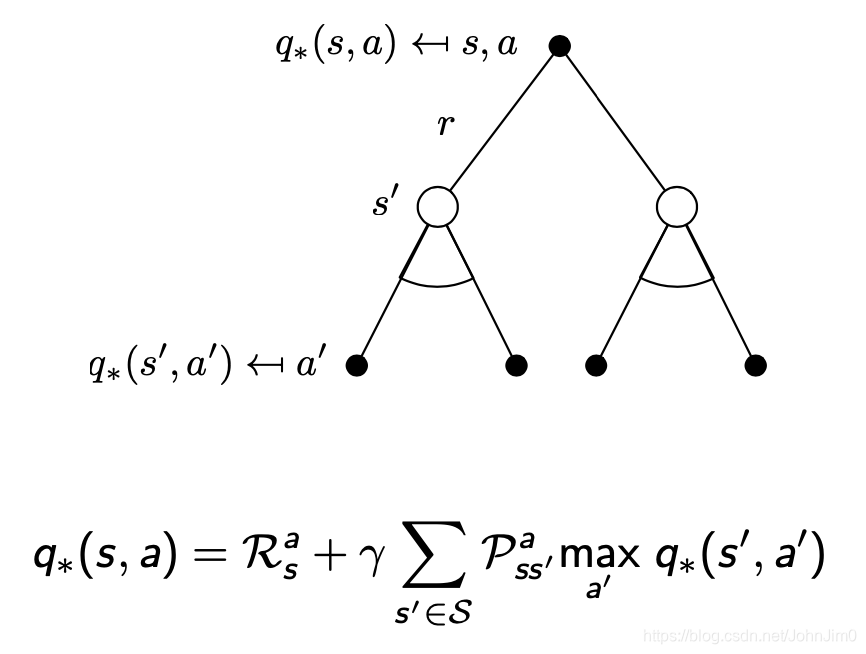
18 贝尔曼最优等式
对应的贝尔曼最优等式(Bellman Optimality Equation)表示如下:
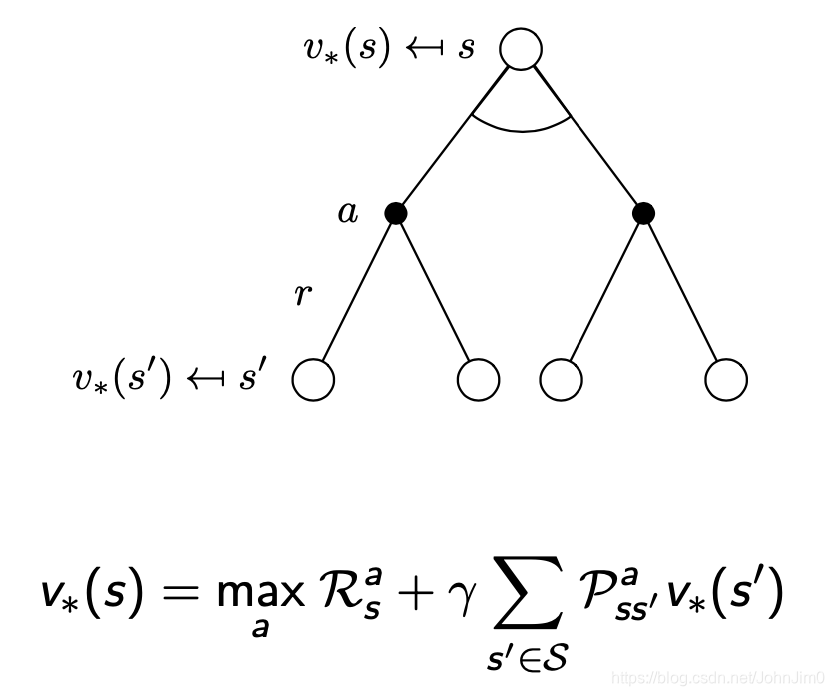
如下:
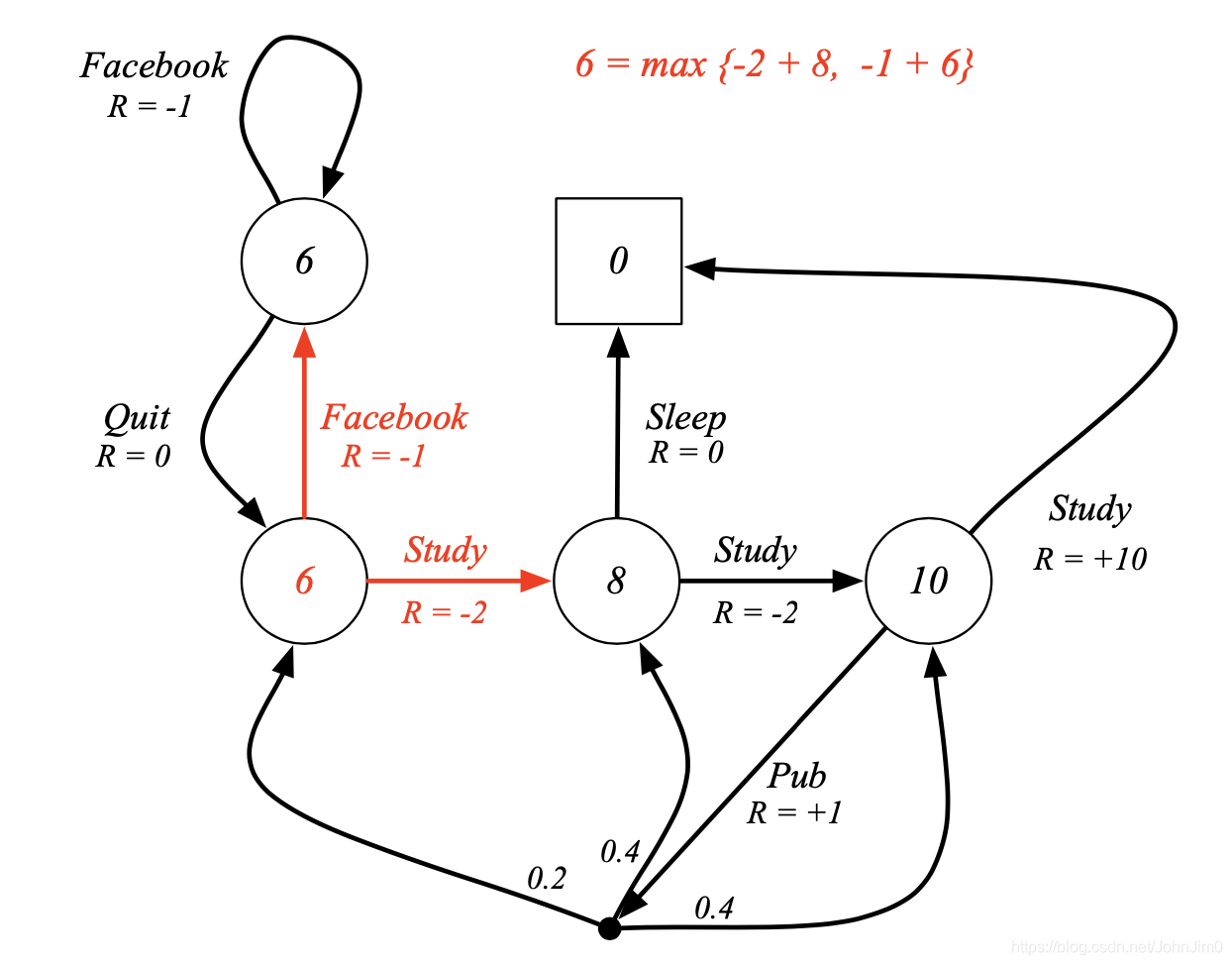
假如我们处于红色数字6的状态,对应的下一步动作有两个,每个动作对应的q值分别为-2+8=6,和-1+6=5,此时我们就应该选择q值最大的study动作。
需要注意的是贝尔曼最优等式是非线性的,因此没有一个通解,常用的解决方法如下:
- Value Iteration
- Policy Iteration
- Q-learning
- Sarsa
19 MDP的拓展
前面简介那一节说了,原始的MDP是有限个状态的,并且fully observable,而相应地MDP的拓展形式有:
- Infinite and continuous MDPs
- Partially observable MDPs
- Undiscounted, average reward MDPs
19.1 Infinite MDPs
即无限状态的MDP,可能情况以及对应的解决方法如下:
- 离散的无限状态-动作空间
比较简单 - 连续的状态-动作空间
Closed form for linear quadratic model (LQR),即转换为线性二次模型 - 连续时间
1)Requires partial differential equations,需要偏微分方程
2)Hamilton-Jacobi-Bellman (HJB) equation
3)Limiting case of Bellman equation as time-step → 0
19.2 POMDPs
即Partially observable MDPs,如下:
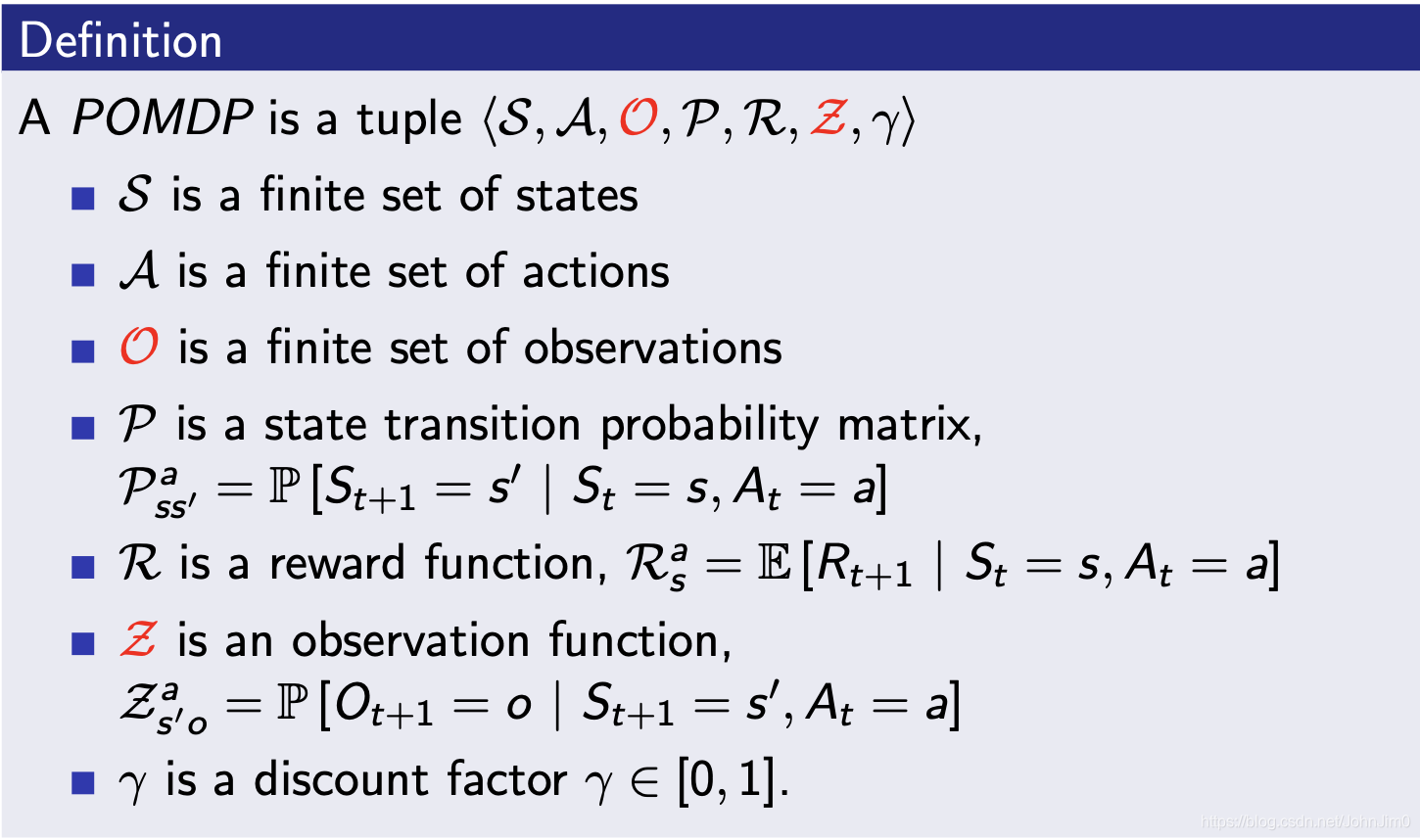
这里引入了一个观测值,即observation。
后面的暂时不展开,有兴趣可以看一下Ergodic Markov Process。
