路径规划
- Dijkstra
- s:起点;S:已知到起点最短路径的点;U:未知到起点最短路径的点
- Step 1:S中只有起点s,从U中找出路径最短的
- Step 2:更新U中的顶点和顶点对应的路径
- 重复Step 1,Step 2
![]()
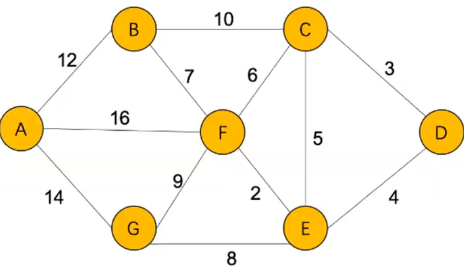
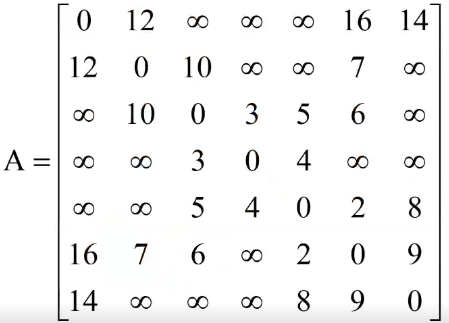
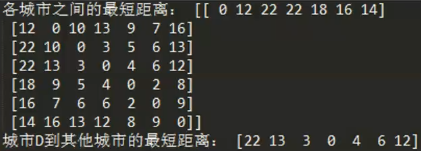
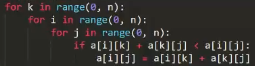
- Floyd
- 任意节点i到j的最短路径只有两种
- 直接从i到j,即Dis(i,j)
- 从i经过若干个节点k到j,若Dis(i,k)+Dis(k,j)<Dis(i,j),则更新Dis(i,j)
- 三层for循环,复杂度 n3
- 用邻接矩阵保存节点间起始举例
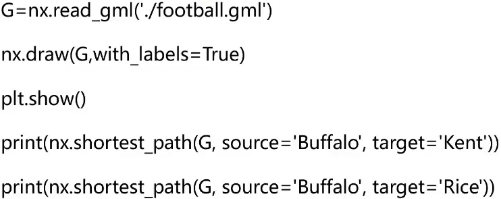
- 图论工具
- NetworkX
- gml:地理位置的xml文件
- 地图导航原理
- 在路口设置节点
- 节点间权重为流速
- 通过雷达获取流速(车密度)
- 发现新路径,是否切换路径?
- 动态计算,推荐
- 网络固定,流速变化
- 路网节点多,复杂情况下如何进行实时响应
- 如从北京到上海
- 分层计算
- 先以城市为节点
- 城市之间再用动态规划(Dijkstra)计算

图的其他应用
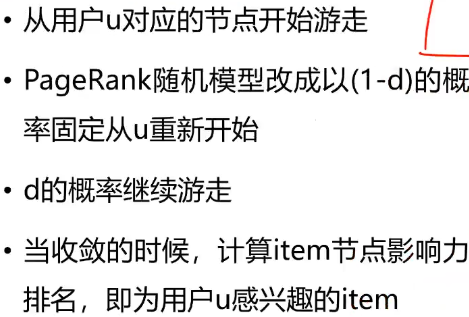
- PageRank
- 节点影响力
- 基于图的推荐算法