ROS安装
环境信息:Ubuntu 16.04
ROS版本 :kinetic
硬件信息:爱机小白
1.更改软件源:


箭头指的全部勾选,最后一个可以勾选也可以不勾选
在“下载至”选择清华的源
2.开始安装,依次执行以下命令
sudo apt-get update
然后添加ROS软件源,下面是清华的源,亲测好用
`sudo sh -c '. /etc/lsb-release && echo "deb http://mirrors.tuna.tsinghua.edu.cn/ros/ubuntu/ $DISTRIB_CODENAME main" > /etc/apt/sources.list.d/ros-latest.list'`
下面是中科大的源,如果清华的源安装缓慢,可以试试中科大的源,一般来说清华是比较快的,我安装只用了5分钟左右。
`sudo sh -c '. /etc/lsb-release && echo "deb http://mirrors.ustc.edu.cn/ros/ubuntu/ $DISTRIB_CODENAME main" > /etc/apt/sources.list.d/ros-latest.list'
上面两个源选择一个,下一步
sudo apt-key adv --keyserver hkp://ha.pool.sks-keyservers.net:80 --recv-key 0xB01FA116
sudo apt-get update
sudo apt-get install ros-kinetic-desktop-full
到这一步没问题的话,那就基本成了
接下来初始化rosdep
sudo rosdep init
rosdep update
我到了这一步出现了问题,sudo rosdep init无法初始化,具体错误忘了保存,我试了网上一些办法也不行,后来没管它,过了一天再初始化,就可以了。我认为应该是网络问题,如果你也在这一步遇到问题,建议使用手机热点试一试,或者连个vpn试试?实在不行,跳过这一步,先安装依赖项。
ok,如果你没有问题,那么执行最后一步,安装依赖
sudo apt-get install python-rosinstall python-rosinstall-generator python-wstool build-essential
大功告成,赶快试一试
3.测试
打开一个终端,输入
roscore
这个命令会启动ROS的master节点,效果如下图
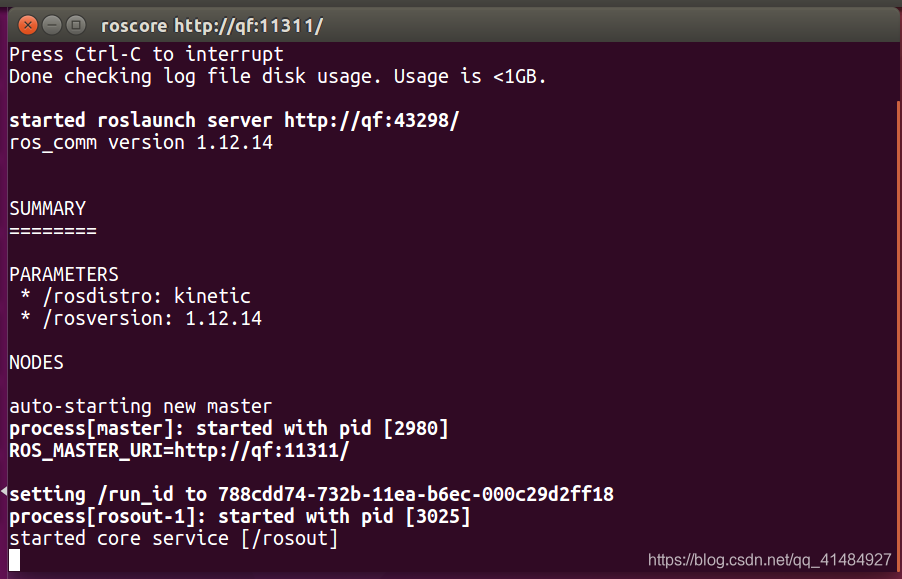
如果能启动,恭喜你安装成功!
网上还有一个小乌龟教程,可以测试,这里就不再赘述。
