前言
边缘检测是处理图像里面的比较重要的一个概念,现在的边缘有传统的处理算法,也有加入深度学习的边缘检测算法,这里把我用过的几种边缘检测做个对比。
canny算子
1.OpenCV canny() C++ API
void Canny(InputArray image, OutputArray edges, double threshold,double threshold2,int apertureSize = 3,bool L2gradient = false)
参数说明:
InputArray image:输入图像(8-bit)。
OutputArray edges:输出的边缘图像。
double threshold:第一个滞后性阈值
double threshold2:第二个滞后性阈值
int apertureSize:表示应用Sobel算子的孔径大小,默认值为3
bool L2gradient:一个计算图像梯度幅值的标识,默认值false
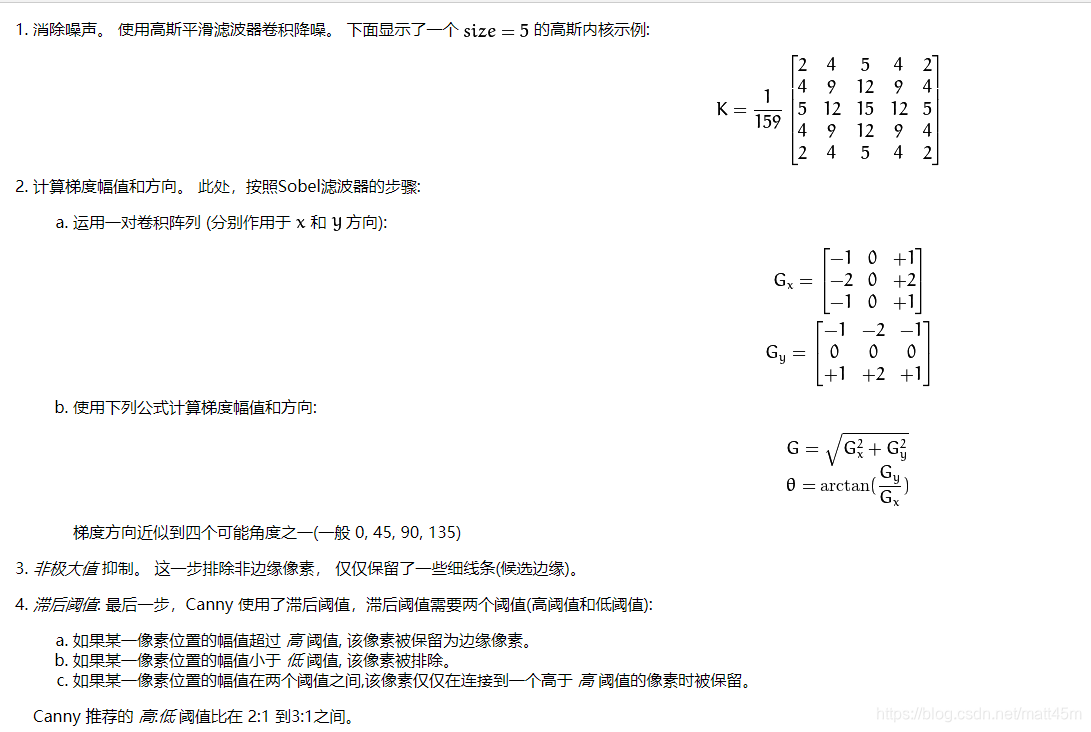
2.实现步骤(OpenCV官方文档)
3.代码实现
#include <opencv2/opencv.hpp>
#include <opencv2/highgui/highgui.hpp>
#include <opencv2/imgproc/imgproc.hpp>
cv::Mat src, gray, dst;
cv::Mat canny_edges;
int canny_low_threshold = 1;
//Canny边缘检测窗口滚动条的回调函数
static void cannyCallBack(int, void *);
int main()
{
src = cv::imread("1.jpg");
if (src.empty())
{
return -1;
}
cv::namedWindow("原图",0);
cv::imshow("原图", src);
dst.create(src.size(), src.type());
//灰度图像
cvtColor(src, gray, cv::COLOR_BGR2GRAY);
cv::namedWindow("Canny", 0);
//创建可调节的窗口
cv::createTrackbar("参数值:", "Canny", &canny_low_threshold, 255, cannyCallBack);
//调用回调函数
cannyCallBack(0, 0);
cv::waitKey(0);
return 0;
}
//回调函数
void cannyCallBack(int, void *)
{
//先使用3×3的内核进行降噪
blur(gray, canny_edges, cv::Size(3, 3));
cv::Mat out;
//调用Canny算子
Canny(canny_edges, out, canny_low_threshold, canny_low_threshold * 3, 3);
dst = cv::Scalar::all(0);
src.copyTo(dst, out);
//显示效果图
imshow("Canny", out);
}
4.运行效果