介绍
Canny是边缘检测算法,在1986年提出的。
是一个很好的边缘检测器
很常用也很实用的图像处理方法
步骤
高斯模糊 - GaussianBlur
灰度转换 - cvtColor
计算梯度 – Sobel/Scharr
非最大信号抑制
高低阈值输出二值图像
非最大信号抑制:
θ = arctan(Gy/Gx) G表示 Sobel/Scharr 求出的梯度,θ 表示图像中任意点的 Gy与Gx 角度,取值范围为 0-180 参考 HiKao-OpenCV 3.1.0 图像处理教程-19.ppt
特定方向上相邻的两个点,如果小于当前值(即 G = sqrt(Gx^2 + Gy^2) ),就去掉,如果当前值小于相邻的两个点的值,那么当前值去掉。
特定方向的方向选择方式为:如果 0<θ<22.5 || 157.5<θ<180 ,那么方向为 该点的上下方向
如果 22.5<θ<67.5 ,那么方向为该点的主对角线方向
如果 67.5<θ<112.5 ,那么方向为该点的左右方向
如果 112.5<θ<157.5 ,那么方向为该点的副对角线方向
高低阈值输出二值图像:
- T1, T2为阈值,凡是高于T2的都保留,凡是小于T1都丢弃,从高于T2的像素出发,凡是大于T1而且相互连接的,都保留。最终得到一个输出二值图像。
- 推荐的高低阈值比值为 T2: T1 = 3:1/2:1其中T2为高阈值,T1为低阈值
Canny(
InputArray src, // 8-bit的输入图像,可以是单通道,也可以是多通道
OutputArray edges,// 输出边缘图像,单通道 8-bit, 一般都是二值图像,背景是黑色
double threshold1,// 低阈值,常取高阈值的1/2或者1/3
double threshold2,// 高阈值
int aptertureSize,// Sobel算子的size,通常3x3,取值3
bool L2gradient // 选择 true表示是L2来归一化,否则用L1归一化 L2 = sqrt((dI/dx)^2 + (dI/dy)^2) ,L1 = |dI/dx| + |dI/dy| ,一般选 L1 false
)
代码
#include "../common/common.hpp"
static Mat src, gray;
static int t1_value = 50;
static int max_value = 255;
static const char * output = "canny_edge";
static void cannyTest(int, void*);
void main(int argc, char** argv)
{
src = imread(getCVImagesPath("images/lena.png"), IMREAD_COLOR);
imshow("src", src);
cvtColor(src, gray, CV_BGR2GRAY);
namedWindow(output, CV_WINDOW_AUTOSIZE);
createTrackbar("Threshold Value : ", output, &t1_value, max_value, cannyTest);
cannyTest(0, 0);
waitKey(0);
}
void cannyTest(int, void*)
{
Mat gray_blur, canny_edge, dst;
//这里的 blur 仅仅只是对原始图像去干扰,可有可无,Canny 函数内部已经实现了其算法的五个步骤
blur(gray, gray_blur, Size(3, 3), Point(-1, -1), BORDER_DEFAULT);
//输入图像的颜色数据类型要求是8bit , 输入图像可以是 gray ,也可以是 src ,src的干扰线比gray多很多
Canny(gray_blur, canny_edge, t1_value, t1_value * 2, 3, false);//边缘检测提取,t1_value越大,检测到的边缘越少
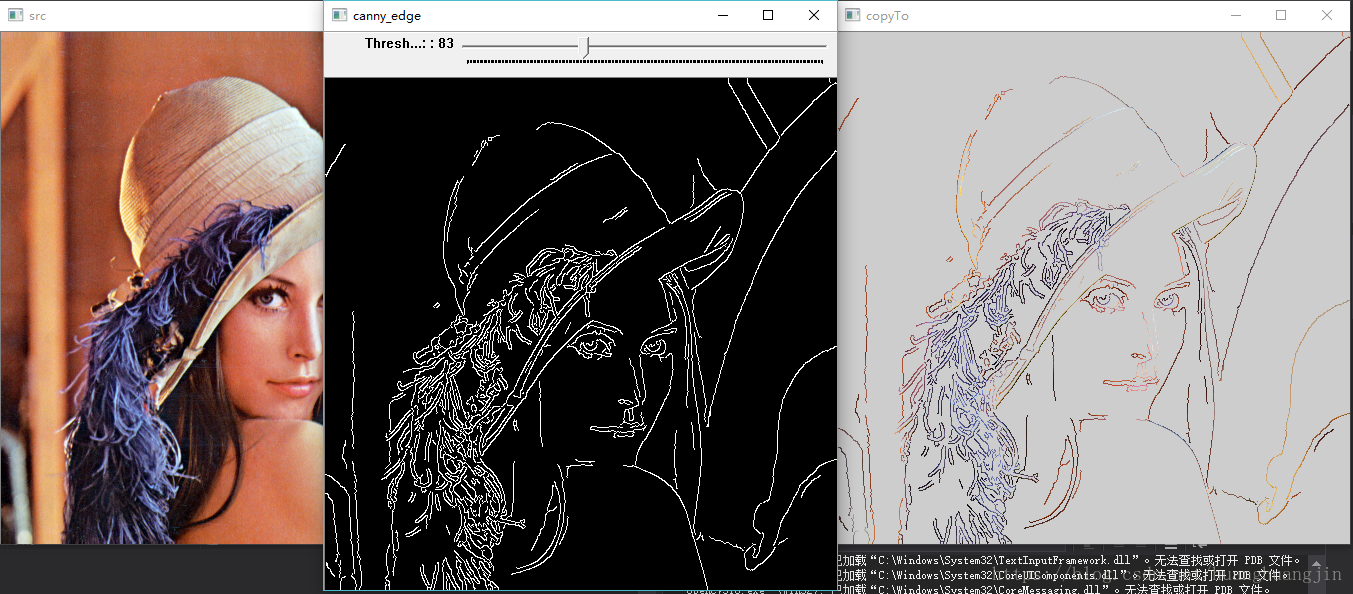
imshow(output, canny_edge);// 如果使用 ~canny_edge 表示将图像黑白反过来
dst.create(src.size(), src.type());//颜色数据初始值为 205 ?
//如果mask.at(i,j)为1,则把src.at(i,j)赋给dst.at(i,j),如果mask.at(i,j)为0,则dst.at(i,j)不变
src.copyTo(dst, canny_edge);
imshow("copyTo", dst);
}
效果图