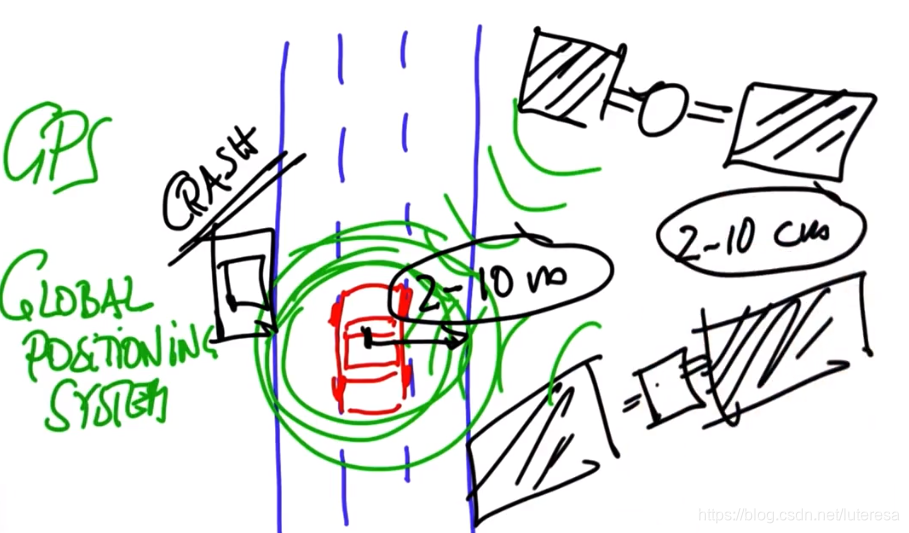
无人车定位问题
准确定位,是无人车技术的基础,常用的GPS定位,误差经常为210m,而无人车的精度要求210cm左右,怎么实现呢,这就是无人车的定位问题。
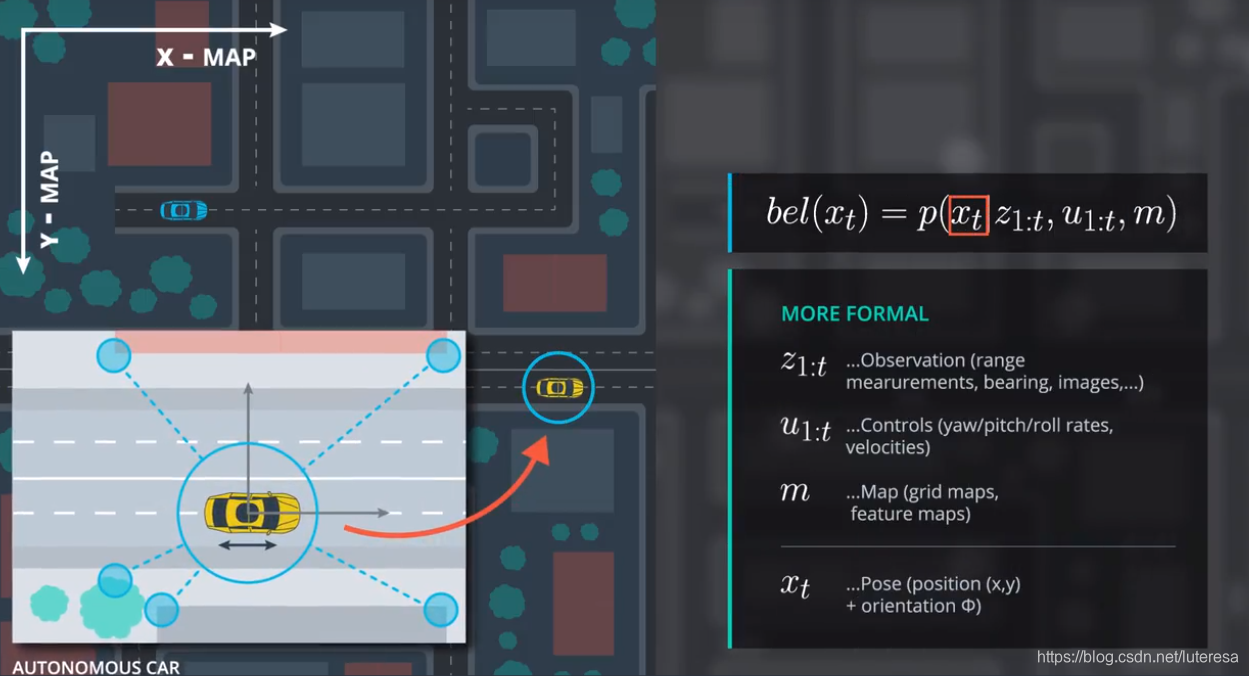
变量定义
: 从时间步骤1到t的所有观测, 观察数据可能是距离测量值,方向角或者图像等等。
: 从时间步骤1到t的所有控制元素,一般包括偏航角、间距或滚动率、速度信息
m: 可能是全球环境的网格地图,或一个包括全球特征点和车道几何图形的数据库;
知道车辆的本地坐标系和地图的全球坐标系之间的转换,就可以知道车辆在全球的位置;
: 车辆在时间t的位置,包括坐标(x,y),方向 ;
定位就是估算状态 , 也就是车辆位置;
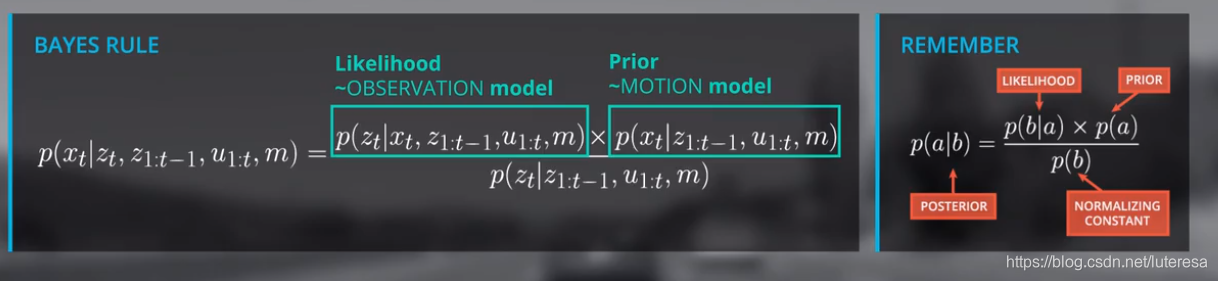
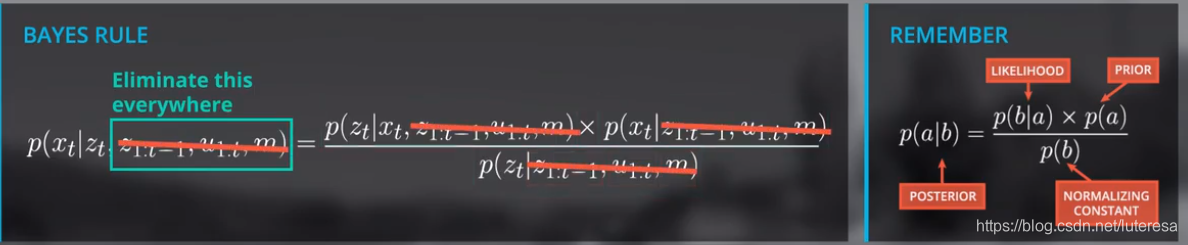
贝叶斯公式
With respect to localization, these terms are:
P(location|observation): This is P(a|b), the normalized probability of a position given an observation (posterior).
P(observation|location): This is P(b|a), the probability of an observation given a position (likelihood)
P(location): This is P(a), the prior probability of a position
P(observation): This is P(b), the total probability of an observation
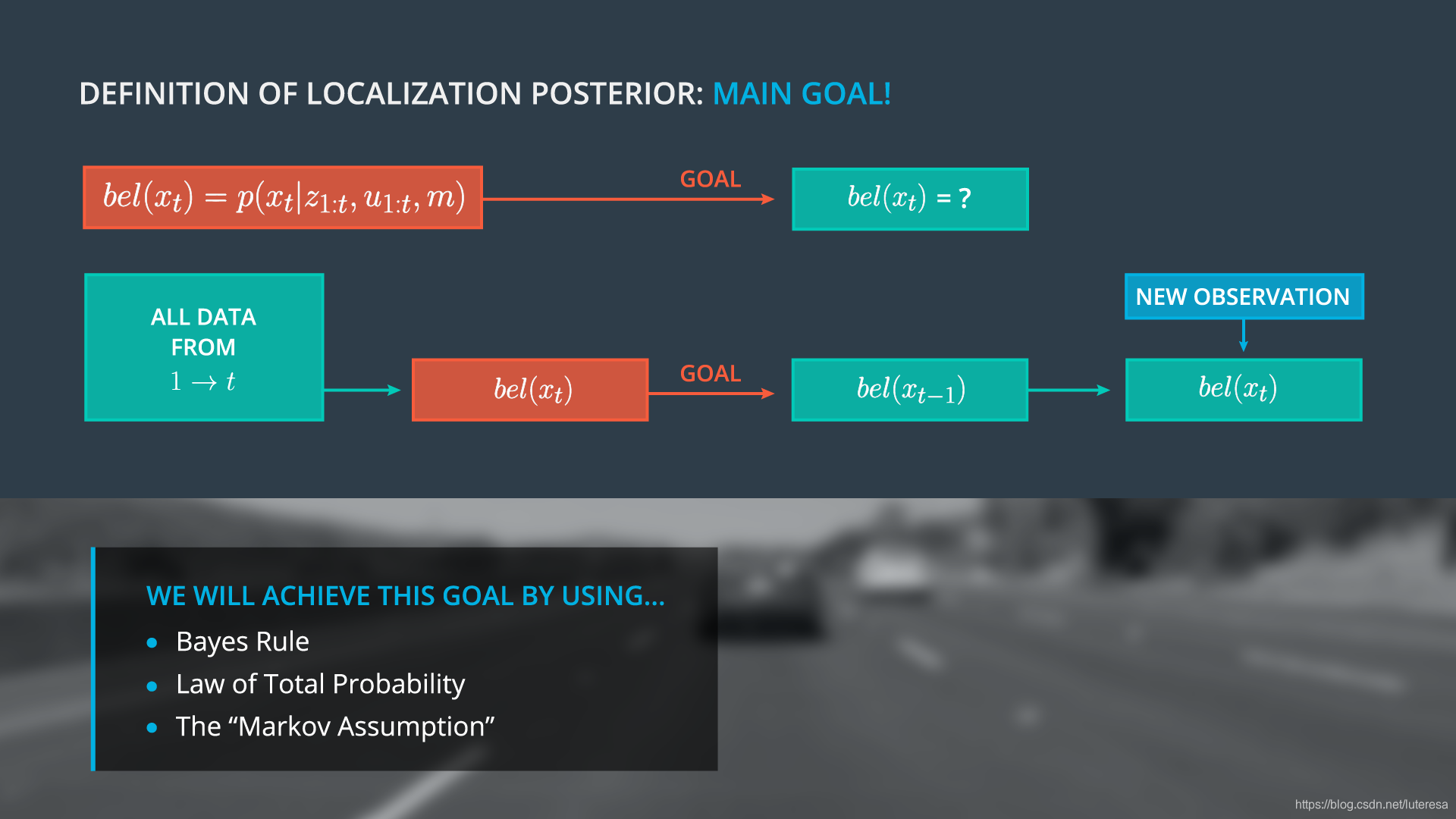
后验概率的定义:
求得后验概率的前提条件是,所有的之前观察( ),所有的控制( ), 假设地图已知且不变(地图变,就是所谓SLAM问题了)。
由后验概率定义看出,需要处理大量的数据(测量数据大量,且累计),因此不可行;
1.马尔可夫定位
核心思想: 我们不想利用全部观察历史来估算当前状态,尝试从 得到递归状态的估算器,
当前信仰,可以用上一个状态和新的观察信息估算得到。这个估算叫做贝叶斯定位滤波器,或者马尔卡夫定位。
这样就不用加载所有历史的观察和运动数据,要获得这个递归公式,必须运动贝叶斯公式,全概率公式,马尔可夫假设。
P(location)是由运动模型和前一个状态决定的
寻找递归公式
Bayes Rule
重新定义测量数据,对应到当前模型
马尔卡夫假设
通用的计算模型

马尔可夫假设:
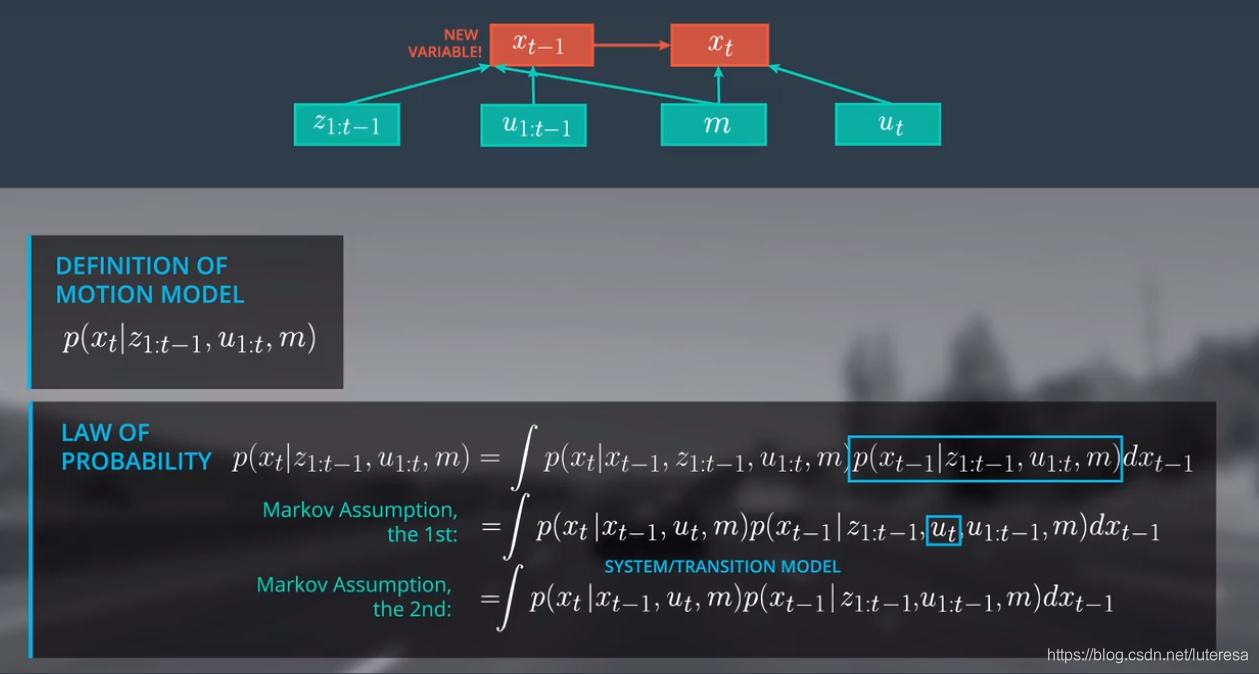
简略改写为:

注:对于离散模型,积分用加法代替。
Reference Equations
Discretized Motion Model:
Transition Model:
'i’th Motion Model Probability:
以上是运动模型的数学原理,代码实现:
// TODO: implement the motion model: calculates prob of being at
// an estimated position at time t
float motion_model(float pseudo_position, float movement, vector<float> priors,
int map_size, int control_stdev) {
// initialize probability
float position_prob = 0.0f;
// YOUR CODE HERE
for (float j=0; j < map_size; j++)
{
float next_psududo_position = j;
float distance_ij = pseudo_position - next_psududo_position;
float transition_prob = Helpers::normpdf(distance_ij,movement,control_stdev);
position_prob += transition_prob*priors[(int)j];
}
return position_prob;
}
// step through each pseudo position x (i)
for (float i = 0; i < map_size; ++i) {
float pseudo_position = i;
// get the motion model probability for each x position
float motion_prob = motion_model(pseudo_position, movement_per_timestep,
priors, map_size, control_stdev);
// print to stdout
std::cout << pseudo_position << "\t" << motion_prob << std::endl;
}
Bayes Filter for Localization (Markov Localization)
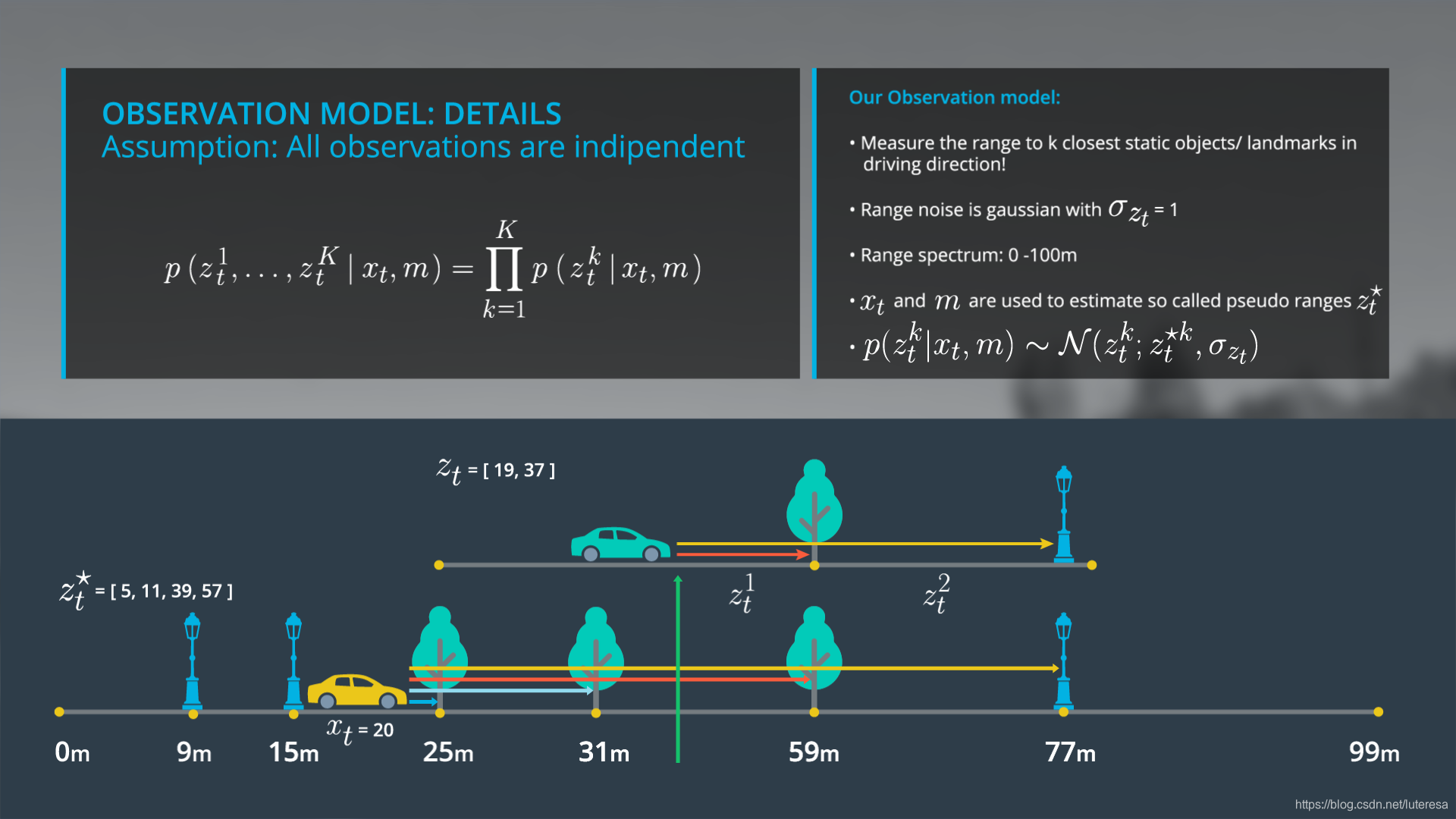
2.测量更新
测量模型如下:
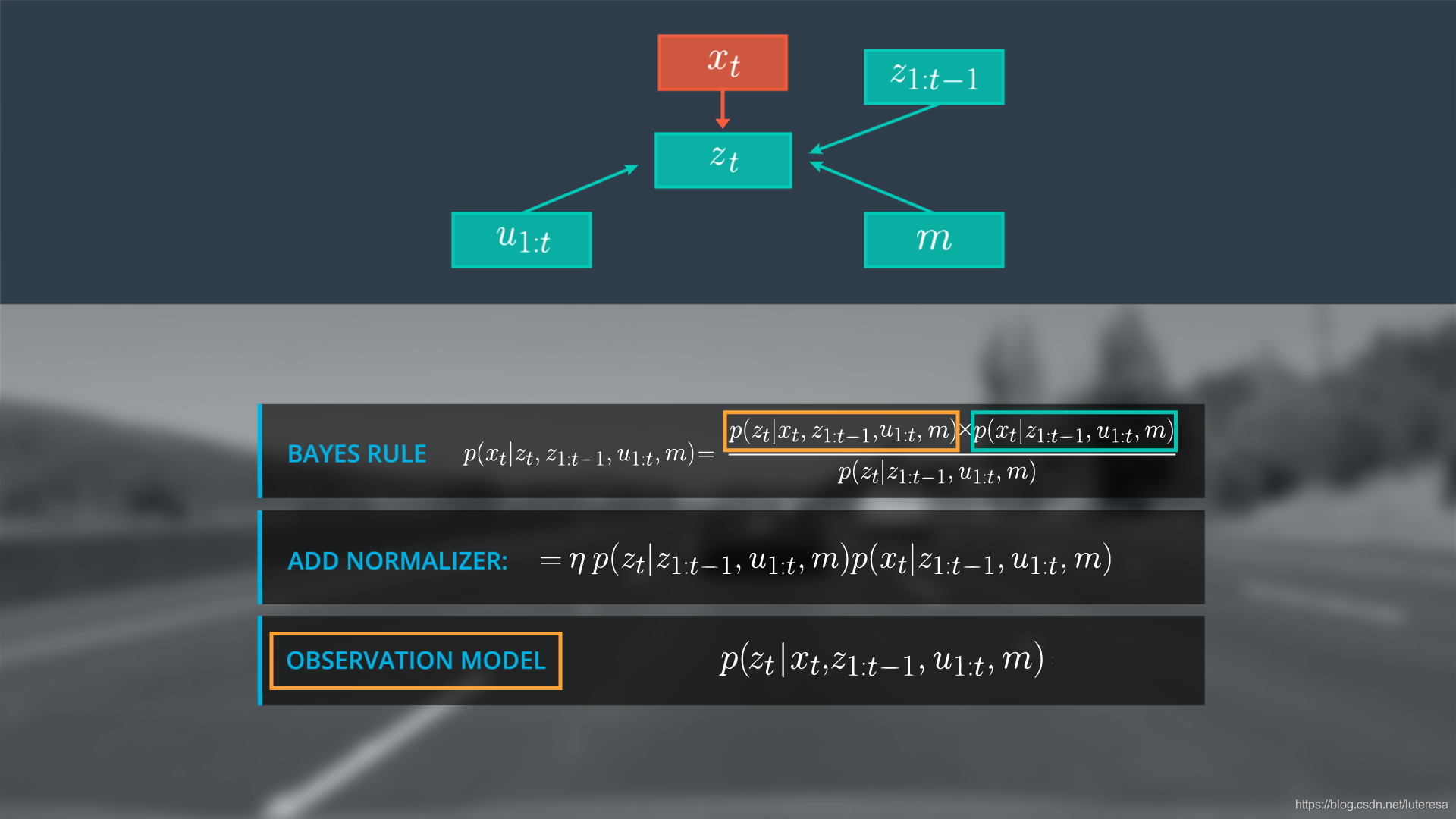
同样运用马尔可夫假设,简化模型如下:
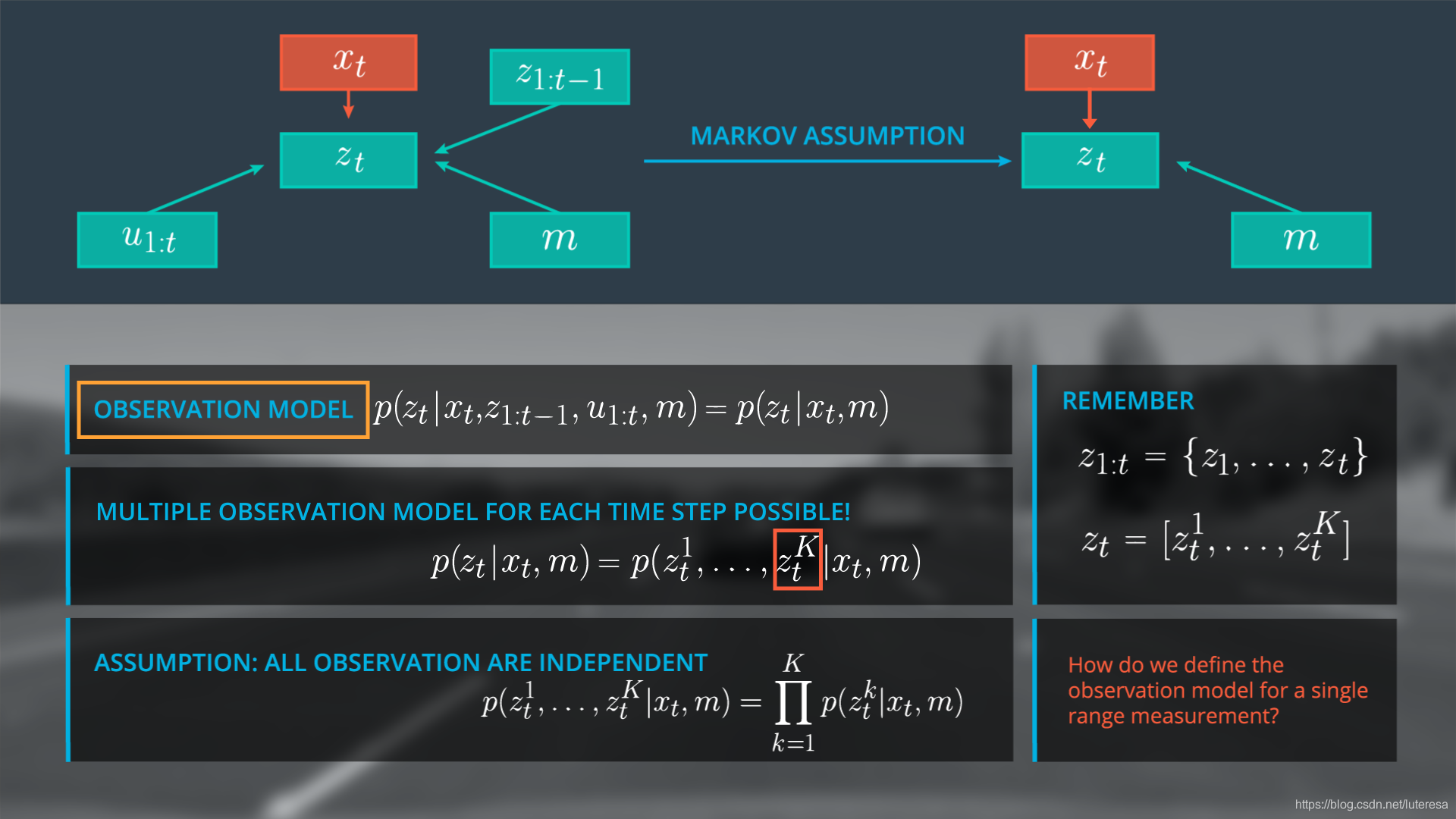
注意:
如何定义单个距离测量值的观察模型呢?
一般来说,车辆有很多不同的传感器,比如激光雷达,毫米波雷达,摄像头,超声传感器等,
每个传感器都有各自的噪声行为和表现,观察模型还与地图有关,比如一维地图上,距离测量模型为高斯分布,测量如下:
马尔可夫定位的贝叶斯公式
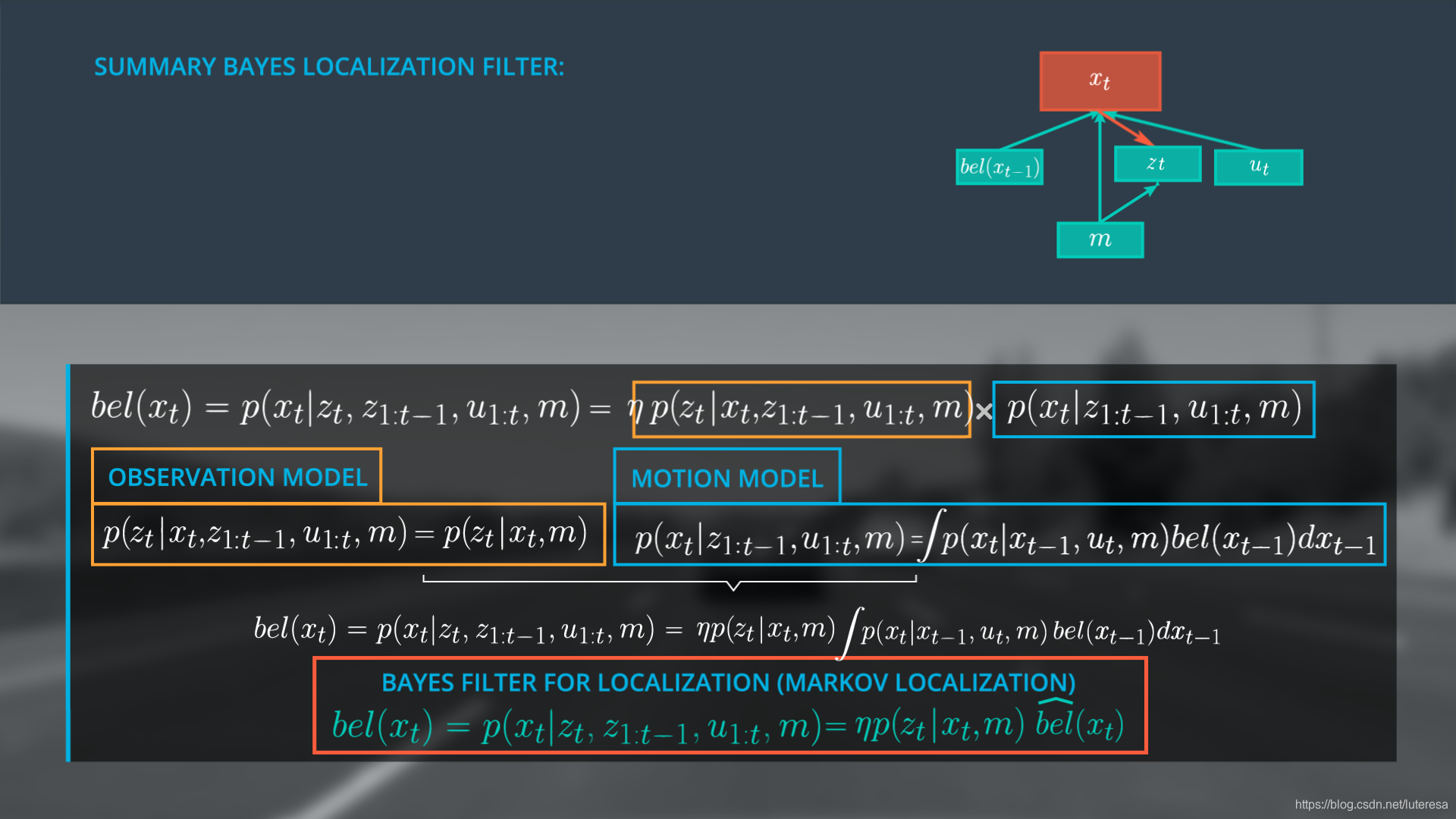
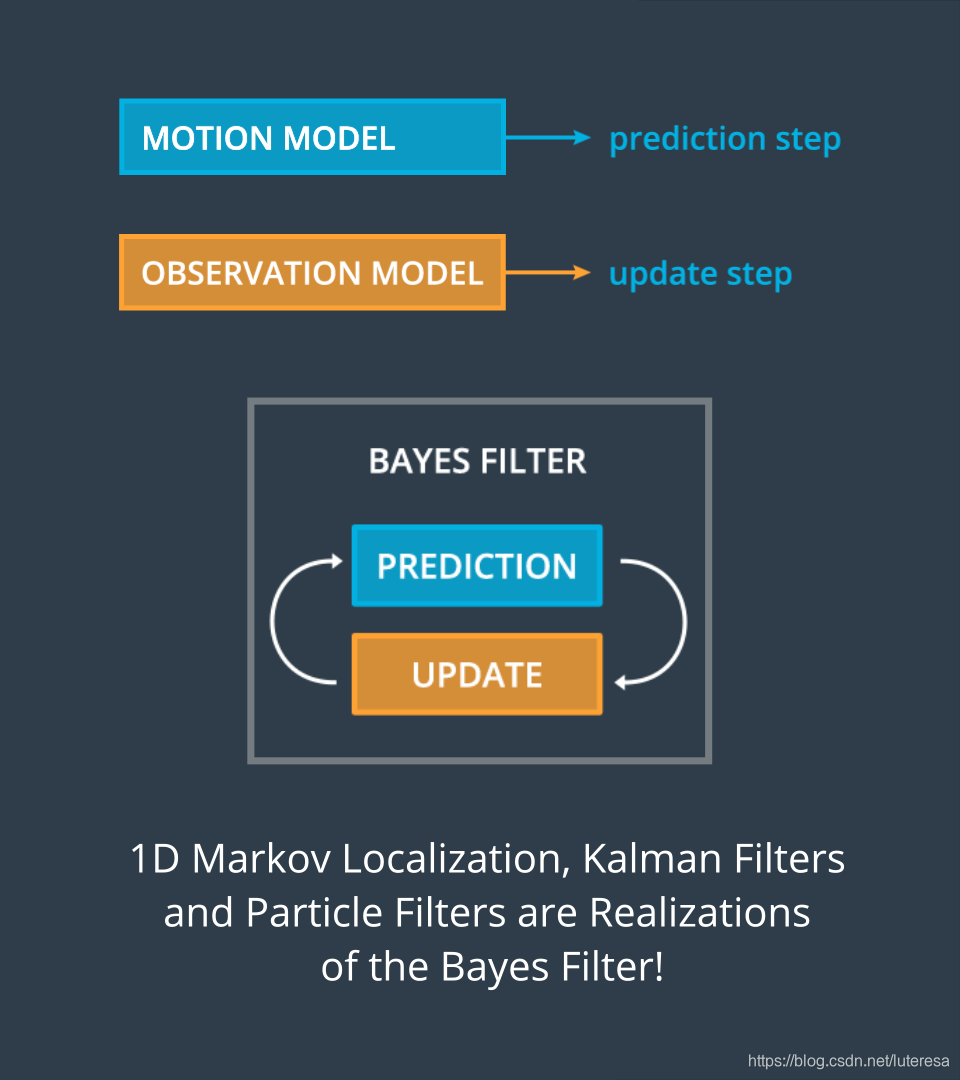
贝叶斯滤波器
通用的贝叶斯滤波器,包含预测和测量两部分,完整的贝叶斯滤波器,就是预测和测量的循环更新。
马尔可夫滤波,卡尔曼滤波,直方图滤波,都属于贝叶斯滤波器。
代码实现:
//helpers.h
#ifndef HELP_FUNCTIONS_H
#define HELP_FUNCTIONS_H
#include <math.h>
class Helpers {
public:
// definition of one over square root of 2*pi:
constexpr static float STATIC_ONE_OVER_SQRT_2PI = 1/sqrt(2*M_PI);
/**
* normpdf(X,mu,sigma) computes the probability function at values x using the
* normal distribution with mean mu and standard deviation std. x, mu and
* sigma must be scalar! The parameter std must be positive.
* The normal pdf is y=f(x,mu,std)= 1/(std*sqrt(2pi)) e[ -(x−mu)^2 / 2*std^2 ]
*/
static float normpdf(float x, float mu, float std) {
return (STATIC_ONE_OVER_SQRT_2PI/std)*exp(-0.5*pow((x-mu)/std,2));
}
// static function to normalize a vector
static std::vector<float> normalize_vector(std::vector<float> inputVector) {
// declare sum
float sum = 0.0f;
// declare and resize output vector
std::vector<float> outputVector;
outputVector.resize(inputVector.size());
// estimate the sum
for (int i = 0; i < inputVector.size(); ++i) {
sum += inputVector[i];
}
// normalize with sum
for (int i = 0; i < inputVector.size(); ++i) {
outputVector[i] = inputVector[i]/sum;
}
// return normalized vector:
return outputVector;
}
};
#endif // HELP_FUNCTIONS_H
main.cpp
#include <algorithm>
#include <iostream>
#include <vector>
#include "helpers.h"
using std::vector;
using std::cout;
using std::endl;
vector<float> initialize_priors(int map_size, vector<float> landmark_positions,
float position_stdev);
float motion_model(float pseudo_position, float movement, vector<float> priors,
int map_size, int control_stdev);
// function to get pseudo ranges
vector<float> pseudo_range_estimator(vector<float> landmark_positions,
float pseudo_position);
// observation model: calculate likelihood prob term based on landmark proximity
float observation_model(vector<float> landmark_positions,
vector<float> observations, vector<float> pseudo_ranges,
float distance_max, float observation_stdev);
int main() {
// set standard deviation of control
float control_stdev = 1.0f;
// set standard deviation of position
float position_stdev = 1.0f;
// meters vehicle moves per time step
float movement_per_timestep = 1.0f;
// set observation standard deviation
float observation_stdev = 1.0f;
// number of x positions on map
int map_size = 25;
// set distance max
float distance_max = map_size;
// define landmarks
vector<float> landmark_positions {3, 9, 14, 23};
// define observations vector, each inner vector represents a set
// of observations for a time step
vector<vector<float> > sensor_obs {{1,7,12,21}, {0,6,11,20}, {5,10,19},
{4,9,18}, {3,8,17}, {2,7,16}, {1,6,15},
{0,5,14}, {4,13}, {3,12}, {2,11}, {1,10},
{0,9}, {8}, {7}, {6}, {5}, {4}, {3}, {2},
{1}, {0}, {}, {}, {}};
/**
* TODO: initialize priors
*/
//初始先验概率,每一个完整滤波周期都会更新priors
vector <float> priors = initialize_priors(map_size,landmark_positions,position_stdev);
// UNCOMMENT TO SEE THIS STEP OF THE FILTER
cout << "-----------PRIORS INIT--------------" << endl;
for (int p = 0; p < priors.size(); ++p){
cout << priors[p] << endl;
}
cout << "print priors ends."<<endl;
// initialize posteriors
vector<float> posteriors(map_size, 0.0);
// specify time steps
int time_steps = sensor_obs.size();
// declare observations vector
vector<float> observations;
// cycle through time steps
for (int t = 0; t < time_steps; ++t) {
// UNCOMMENT TO SEE THIS STEP OF THE FILTER
cout << "---------------TIME STEP---------------" << endl;
cout << "t = " << t << endl;
cout << "-----Motion----------OBS----------------PRODUCT--" << endl;
if (!sensor_obs[t].empty()) {
observations = sensor_obs[t];
} else {
observations = {float(distance_max)};
}
// step through each pseudo position x (i)
for (unsigned int i = 0; i < map_size; ++i) {
float pseudo_position = float(i);
/**
* TODO: get the motion model probability for each x position
*/
//全概率公式
float motion_prob = motion_model(pseudo_position,movement_per_timestep,priors,map_size,control_stdev);
/**
* TODO: get pseudo ranges
*/
//获得伪距离序列
vector<float> pseudo_ranges = pseudo_range_estimator(landmark_positions,pseudo_position);
/**
* TODO: get observation probability
*/
//测量更新
float observation_prob = observation_model(landmark_positions,observations,pseudo_ranges,distance_max,observation_stdev);
/**
* TODO: calculate the ith posterior and pass to posteriors vector
*/
posteriors[i] = motion_prob*observation_prob;
// UNCOMMENT TO SEE THIS STEP OF THE FILTER
cout << motion_prob << "\t" << observation_prob << "\t"
<< "\t" << motion_prob * observation_prob << endl;
}
// UNCOMMENT TO SEE THIS STEP OF THE FILTER
cout << "----------RAW---------------" << endl;
for (int p = 0; p < posteriors.size(); ++p) {
cout << posteriors[p] << endl;
}
/**
* TODO: normalize posteriors (see helpers.h for a helper function)
*/
posteriors = Helpers::normalize_vector(posteriors);
// print to stdout
//cout << posteriors[t] << "\t" << priors[t] << endl;
// UNCOMMENT TO SEE THIS STEP OF THE FILTER
cout << "----------NORMALIZED---------------" << endl;
/**
* TODO: update priors
*/
priors = posteriors;
// UNCOMMENT TO SEE THIS STEP OF THE FILTER
//for (int p = 0; p < posteriors.size(); ++p) {
// cout << posteriors[p] << endl;
//}
// print posteriors vectors to stdout
for (int p = 0; p < posteriors.size(); ++p) {
cout << posteriors[p] << endl;
}
}
return 0;
}
// observation model: calculate likelihood prob term based on landmark proximity
float observation_model(vector<float> landmark_positions,
vector<float> observations, vector<float> pseudo_ranges,
float distance_max, float observation_stdev) {
// initialize observation probability
float distance_prob = 1.0f;
// run over current observation vector
for (int z=0; z< observations.size(); ++z) {
// define min distance
float pseudo_range_min;
// check, if distance vector exists
if (pseudo_ranges.size() > 0) {
// set min distance
pseudo_range_min = pseudo_ranges[0];
// remove this entry from pseudo_ranges-vector
pseudo_ranges.erase(pseudo_ranges.begin());
} else { // no or negative distances: set min distance to a large number
pseudo_range_min = std::numeric_limits<const float>::infinity();
}
// estimate the probability for observation model, this is our likelihood
distance_prob *= Helpers::normpdf(observations[z], pseudo_range_min,
observation_stdev);
}
return distance_prob;
}
vector<float> pseudo_range_estimator(vector<float> landmark_positions,
float pseudo_position) {
// define pseudo observation vector
vector<float> pseudo_ranges;
// loop over number of landmarks and estimate pseudo ranges
for (int l=0; l< landmark_positions.size(); ++l) {
// estimate pseudo range for each single landmark
// and the current state position pose_i:
float range_l = landmark_positions[l] - pseudo_position;
// check if distances are positive:
if (range_l > 0.0f) {
pseudo_ranges.push_back(range_l);
}
}
// sort pseudo range vector
sort(pseudo_ranges.begin(), pseudo_ranges.end());
return pseudo_ranges;
}
// motion model: calculates prob of being at an estimated position at time t
float motion_model(float pseudo_position, float movement, vector<float> priors,
int map_size, int control_stdev) {
// initialize probability
float position_prob = 0.0f;
// loop over state space for all possible positions x (convolution):
for (float j=0; j< map_size; ++j) {
float next_pseudo_position = j;
// distance from i to j
float distance_ij = pseudo_position-next_pseudo_position;
// transition probabilities:
float transition_prob = Helpers::normpdf(distance_ij, movement,
control_stdev);
// estimate probability for the motion model, this is our prior
position_prob += transition_prob*priors[j];
}
return position_prob;
}
// initialize priors assuming vehicle at landmark +/- 1.0 meters position stdev
vector<float> initialize_priors(int map_size, vector<float> landmark_positions,
float position_stdev) {
// set all priors to 0.0
vector<float> priors(map_size, 0.0);
// set each landmark positon +/-1 to 1.0/9.0 (9 possible postions)
float norm_term = landmark_positions.size() * (position_stdev * 2 + 1);
for (int i=0; i < landmark_positions.size(); ++i) {
for (float j=1; j <= position_stdev; ++j) {
priors.at(int(j+landmark_positions[i]+map_size)%map_size) += 1.0/norm_term;
priors.at(int(-j+landmark_positions[i]+map_size)%map_size) += 1.0/norm_term;
}
priors.at(landmark_positions[i]) += 1.0/norm_term;
}
return priors;
}
