第一部分 准备部分踩坑
1. $ rosdep install --from-paths src --ignore-src --rosdistro=kinetic -y
失败
直接替换为 rosdep install --from-paths ~/catkin_ws/src/ROS-Academy-for-Beginners --ignore-src -r
即可
2. 在添加依赖项的时候,出现了No module named ‘re’
这是由于提前安装的python3.x导致的,因此需要这么做:
https://blog.csdn.net/zbr794866300/article/details/100122397
做完以后一定要记住重新启动终端!重新启动终端!重新启动终端!
注释的方法就是在行前面加#
若用vim改的话注意输入大写I进入编辑模式,ESC退出编辑模式。:wq进行保存
3. 安装roboware的时候需要用的百度网盘,然而貌似ubuntu的百度网盘bug很多,所以用win中转一下吧。(安装roboware的说明:https://blog.csdn.net/luckydog612/article/details/80877179)
- 又发现软件和更新更到ros的时候出现错误,原因是公钥失效了,要按照这篇博客进行解决:
https://blog.csdn.net/asdli/article/details/91978069
与此同时发现一个叫做fcitx-team的东西也会出现错误,直接卸载!按照:
https://www.cnblogs.com/wenzheshen/p/6599636.html
结果还有一个叫做http://ppa.launchpad.net/jonathonf/python-3.6/ubuntu xenial Release的显示也报错!
结果是因为软件源的问题,所以用下面这篇博客解决:
https://blog.csdn.net/Cerman/article/details/85949763
- 然后就按照这个链接安装https://blog.csdn.net/luckydog612/article/details/80877179
第二部分 学习中科大慕课部分
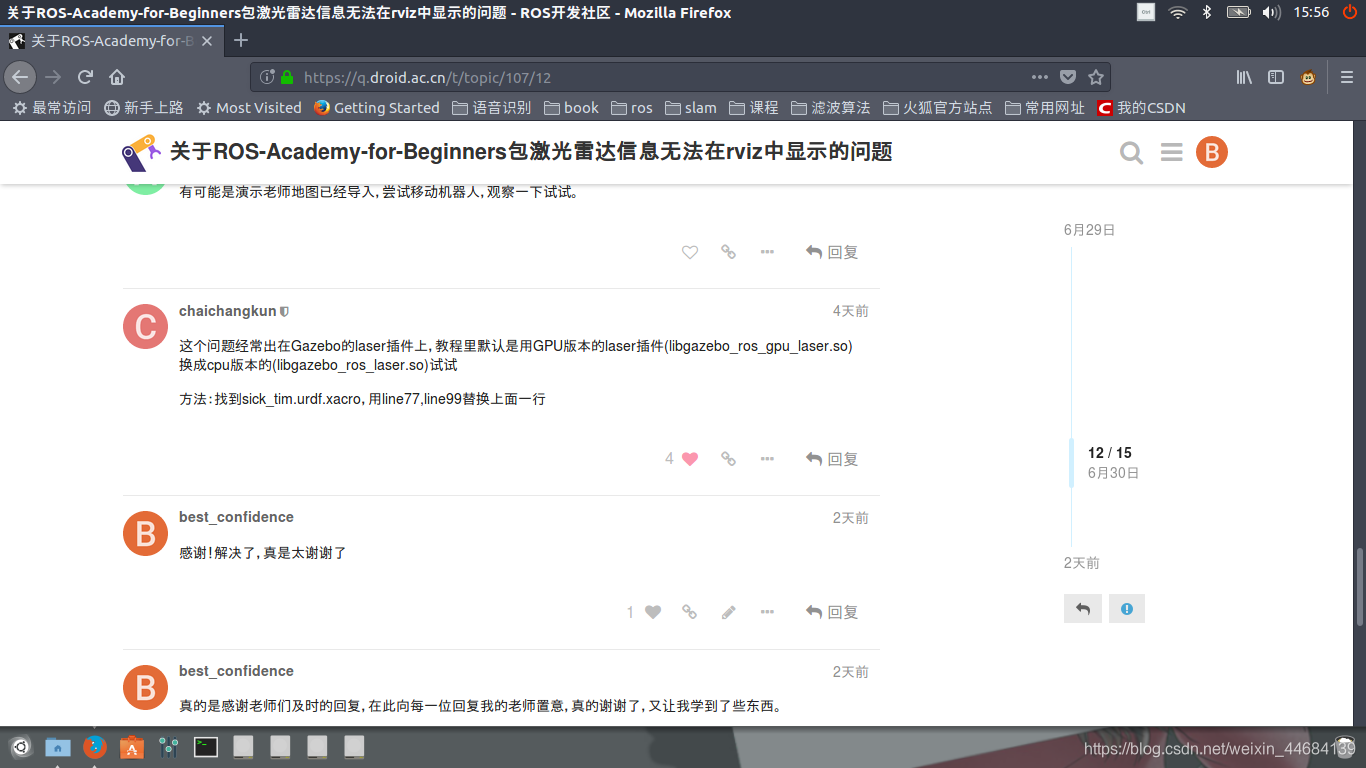
1. 激光雷达信息在rviz中不显示
教程视频在这里:https://www.icourse163.org/learn/ISCAS-1002580008?tid=1002759011#/learn/content?type=detail&id=1004064077&cid=1004978166&replay=true
解决办法:
2.工作空间中,节点重名报错
注意同一个工作空间中的节点不能重名,因此应该更改节点名称,更改位置有:
①节点初始化语句:
ros::init(argc, argv, “talker2”);
ros::init(argc, argv, “listener2”);
②cmakelist.txt中的
add_executable(talker2 src/talker2.cpp )
#必须添加add_dependencies,否则找不到自定义的msg产生的头文件
add_dependencies(talker2 topic_demo_generate_messages_cpp)
target_link_libraries(talker2 ${catkin_LIBRARIES})
add_executable(listener2 src/listener2.cpp )
add_dependencies(listener2 topic_demo_generate_messages_cpp)
target_link_libraries(listener2 ${catkin_LIBRARIES})
xml文件不需要改

