校正図
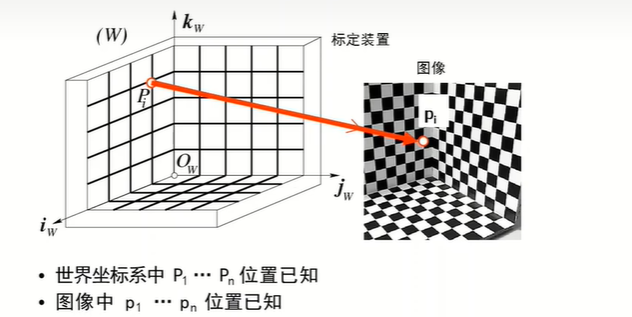
校正ターゲット
P ' = MP w = K [ R T ] P w P^{'}=MP_w=K[R \space T]P_wP』=MP_w=K [ R T ] P w
その中にはKKさんもKは内部パラメータ[ R T ] [R \space T][ RT ]は外部パラメータ です。この式では、内部パラメータと外部パラメータ (11 個の未知のパラメータ) を解くために、少なくとも 6 組の内部点と外部点を使用する必要があります。
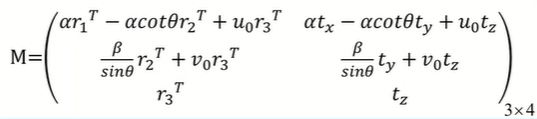
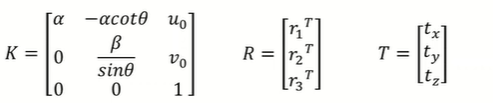
そのうちR 3 × 3 、 T 3 × 1 R_{3 \times 3}、T_{3 \times 1}R3 × 3、T3 × 1。
校正液
近似解を見つけるには、方程式の数が未知のパラメーターの数よりも多い一次一次方程式系を使用します。
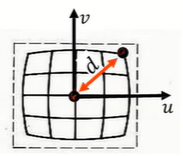
放射状歪みの校正
- 光軸から離れると像倍率が小さくなる
従来のソリューションと比較して、歪み係数が追加されます。
λ = 1 ± ∑ p = 1 3 KP d 2 pd 2 = u 2 + v 2 \lambda =1\pm \sum_{p=1}^{3} K_P d^{2p}\\ d^2=u ^2+v^2私=1±p = 1∑3KPd2P _d2=あなた2+v2
ニュートン法とL − M LMの使用L−Mメソッドで解決します。