| RS-LIDAR-16 | Realsense D455 が使用する深度カメラ | |
| サプライヤー | 深センSagitar Juchuang Technology Co.、Ltd. | インテル |
| 原理 | TOF検出法 | ステレオビジョン |
| 検出距離 | 0.4~150m | 0.52~6m |
| 精度 | 2cm | 4m 未満の場合、エラーは 2% 未満 (このデータは IMU と融合される可能性があります) |
| 視野 | 360°(横)/30°(縦) | 87°(水平)/58°(垂直) |
| 角度分解能 | 0.1°/0.2°/0.4°(水平)/2°(垂直) | |
| フレームレート | 5/10/20Hz | 90Hz |
| 価格 | 26~47k | 3.4k |
| アドバンテージ | 高い精度と安定性、広い距離測定範囲、視覚よりも環境の影響を受けにくい | 低コスト、小型、高フレームレート、豊富な情報 |
| 欠点 | 高コスト、低フレーム レート、限られた情報 (色情報なし、まばらな点群)、煙、ほこり、雨滴、ライダーの動きの歪みの影響を受けやすい | 消費電力が大きい、測距範囲が狭い、露出オーバーの影響を受ける、暗い黒、半透明、鏡面反射のオブジェクトの影響を受ける、精度がやや劣り安定している |
| 近距離での命中率低下 | ||
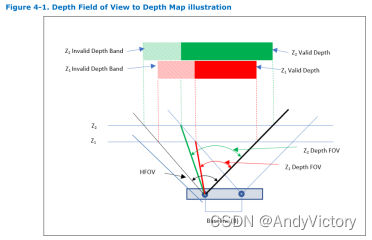
RS-LIDAR-16 精度曲線:

リアルセンスD455:
Intel RealSense D400 シリーズ深度カメラは、ステレオ ビジョンを使用して深度を計算します。ステレオ ビジョンの実装は、左イメージャー、右イメージャー、およびオプションの赤外線プロジェクターで構成されます。赤外線プロジェクターは、目に見えない静的な赤外線パターンを投影して、テクスチャの少ないシーンで深度の精度を向上させます。左右のイメージャがシーンをキャプチャし、イメージャ データを深度イメージング (ビジョン) プロセッサに送信します。深度イメージング (ビジョン) プロセッサは、左の画像のポイントを右の画像に関連付け、Move によって画像内の各ピクセルの深度値を計算します。 . 深度ピクセル値は、深度フレームを生成するために処理されます。後続の深度フレームは、深度ビデオ ストリームを作成します。
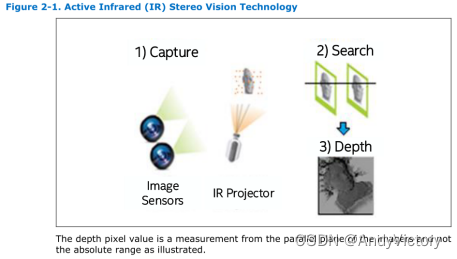
Intel Realsence D400 シリーズは、古典的な両眼視原理を使用して深度を測定します。左右のカメラは画像データを内蔵の深度プロセッサに送信し、両眼測距の原理に基づいて各ピクセルの深度値を計算します。赤外線投光器はありますが、測距用の赤外線反射板は使用していません。赤外線プロジェクターの機能は、目に見えない固定赤外線テクスチャ パターン (スペックルなど) を投影することだけであり、テクスチャが明らかでない環境で深度計算の精度を向上させます。