記事ディレクトリ
序文
ビジュアル スラム関連のプロジェクトを実行するために、最近テスト用にいくつかの異なる深度カメラを見つけました。今回は主に Orbi Zhongguang の Gemini Pro カメラと Intel の D435i の比較について話します。まず物理的な写真を投稿します。

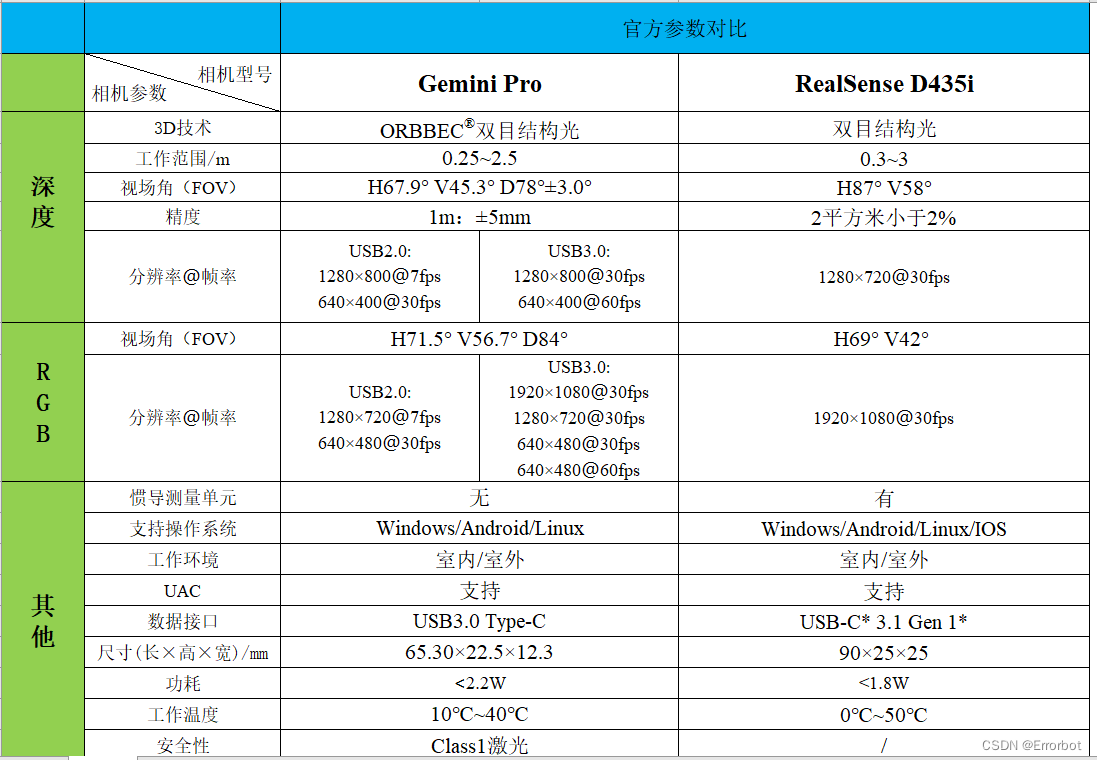
1. パラメータの比較
どちらのカメラも小型で設置が簡単です。Gemini Pro と D435i は両方とも双眼構造光を備えています。深度カメラに関しては、同じ解像度で Gemini Pro の方が操作距離 (0.25m) が短く、RGB に関しては Gemini Pro の方が広い視野を持っています。カメラの範囲が広くなり、表示される情報が増えるほど情報量が増加します。どちらのカメラも屋外での作業をサポートします。
2. 環境構築
私は主にこの 2 つのカメラを Linux で使用していますが、D435i (または RealSense シリーズのカメラ) を使用すると、最初はすべてが難しく感じます。環境に適応するのは本当に面倒です。多くの場合、github の倉庫は、引き下げられず、制限が少し大きいです。Gemini Pro を購入したときに、販売者から直接、簡単な方法でインストールして実行できる SDK をくれたので、気に入っています +1。
3. 実際の使用効果
パラメーターと比較して、実際の効果の比較がより直感的です。ここでは、画像の読み取りと視覚的なスラム効果の 2 つの部分を紹介します。
画像読み取り
携帯電話での撮影:携帯電話で撮影した写真は非常に自然で、明るさが比較的均一です。これは、携帯電話が光と影を自然に処理できるためかもしれません。

カメラの読み取り:
Gemini Pro と D435i で読み取った写真の比較: 両方のカメラで撮影した写真には明るさが不均一であるという問題がありますが、Gemini Pro はオブジェクトの色をよりよく復元でき、オブジェクトはより鮮明で、D435i の画像は暖かいです。霧の感覚があります。パラメータによれば、Gemini Pro の方が広い視野を持っていますが、画像の歪みの問題が強調されています。D435i にも画像の歪みはありますが、歪みはあまり明白ではありません。狭い視野。

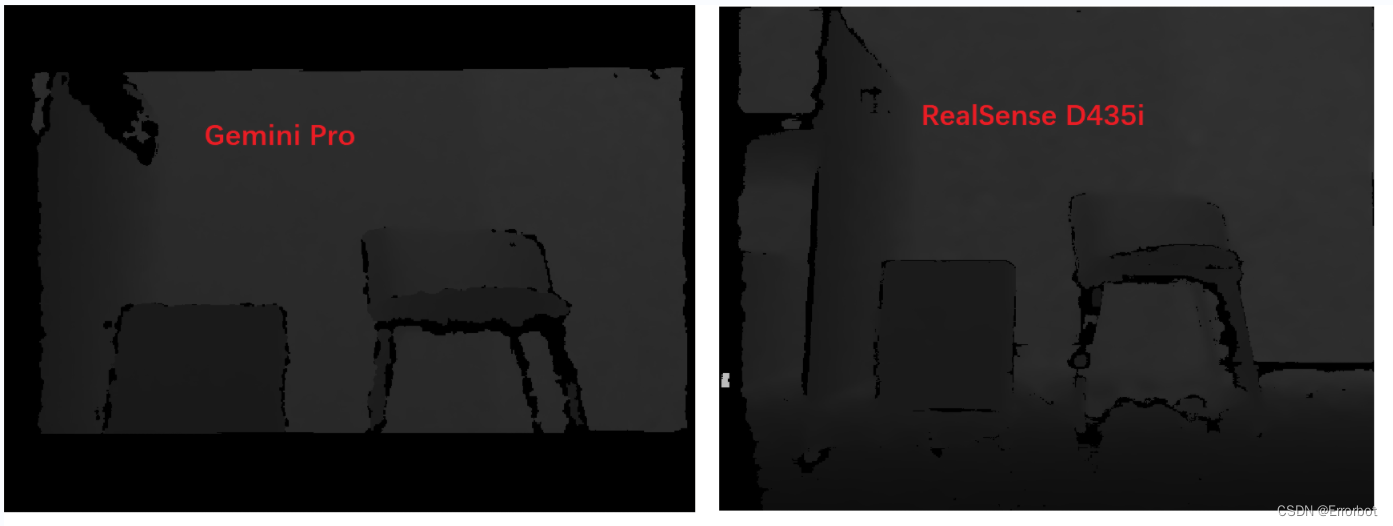
深度画像の読み取り:
比較すると、D435i の深度カメラの視野は Gemini Pro よりも大きく、画像はより細かいですが、Gemini Pro によって読み取られたテーブルの脚の形状がより明白であることがわかります。カメラの中央にあるオブジェクトの画像を読み取るだけの場合は、Gemini Pro でも十分に適しています。
視覚的なスラム効果の比較
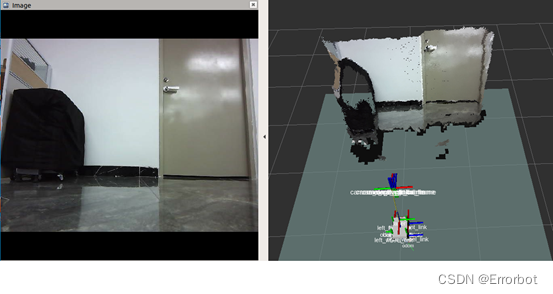
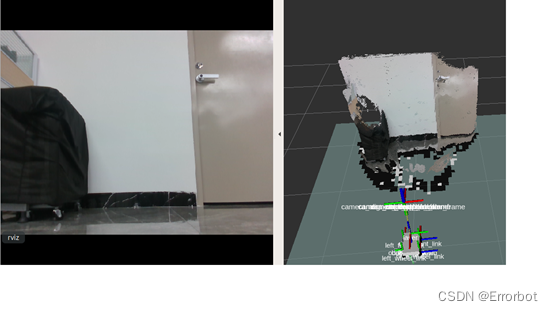
2 台のカメラを Linux に接続してビジュアル スラムを実行し、RGB 画像と深度画像を組み合わせて使用し、主に RTAB-MAP アルゴリズムを使用して効果をテストします。結果は次のとおりです。
Gemini Pro 深度カメラの FOV は RealSense D435i ほど良くありませんが、一般的に、視覚的なスラムの実際のアプリケーションでは、Gemini Pro は RealSense D435i よりも優れた結果を達成します。
Gemini Pro:
RealSense D435i:
要約する
- Gemini Pro と比較すると、RGB
は視野が広く、色の再現性が優れていますが、画像の歪みが生じますが、D435i で読み取った画像は鮮明ではありませんが、画像の歪みは小さいです。 - 深度の比較
D435i の深度カメラの視野は Gemini Pro よりも広く、画像はより繊細ですが、Gemini Pro で読み取った小さなオブジェクトの形状はより明白です。 - Fusion 使用比較
実際に使用してみると、両者の効果に大きな違いはありません。 - 価格比較
2台のカメラの外観は似ています. Gemini Proの現在の価格は約950ですが、D435iの価格は誰もが知っています. 私が購入したときは2,700人民元でした~
一般的にGemini Proは同価格帯のシリーズの中では比較的コストパフォーマンスの高いカメラであり、私の中ではD435iの後継カメラとなっています。