Videotutorial: https://www.bilibili.com/video/BV12s411g7gU?p=155
Tabla de contenido
Propiedades y métodos comunes de los vectores
vector
Una lista de números, que indica el desplazamiento direccional en cada dimensión; también es una cantidad física con tamaño y dirección, el tamaño y el módulo de longitud del vector, y la dirección es la dirección del vector en el espacio, que puede representar la posición y dirección del objeto
forma vectorial
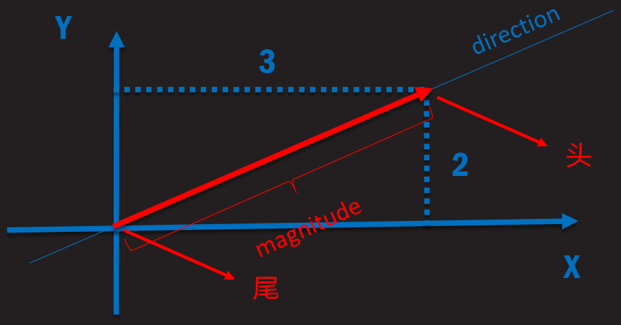
el tamaño (módulo) del vector
la raíz cuadrada de la suma de los cuadrados de los componentes del vector

API:
Vector3.magnitude : longitud del módulo
Vector3..sqrMagnitude : el cuadrado del módulo
la dirección del vector
La obtención de la dirección del vector también se denomina "vector normalizado", o "vector normalizado", es decir, el vector unitario del vector (un vector de tamaño 1).
Significado geométrico: alargar o acortar el vector para que la longitud del módulo sea igual a 1
![]()
API:
Vector3.normalizado : obtiene el vector unitario de este vector
Vector3 vector2=vector1.normalized;//vector2为vector1的单位向量Vector3.Normalize : Establece el propio vector como un vector unitario
vector1.Normalize();//将vector1自身设置为单位向量private void Update()
{
Demo01();
Demo02();
}
//模长
private void Demo01()
{
Vector3 pos = this.transform.position;
float m01 = Mathf.Sqrt(Mathf.Pow(pos.x, 2) + Mathf.Pow(pos.y, 2) + Mathf.Pow(pos.z, 2));
float m02 = pos.sqrMagnitude;
float m03 = Vector3.Distance(Vector3.zero, pos);
Debug.LogFormat("{0}--{1}--{2}", m01, m02, m03);
Debug.DrawLine(Vector3.zero, pos);
}
//方向
private void Demo02()
{
Vector3 pos = this.transform.position;
Vector3 n01 = pos / pos.magnitude;
Vector3 n02 = pos.normalized;
Debug.DrawLine(Vector3.zero, n02, Color.red);
}Operaciones vectoriales (1)
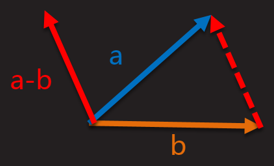
Resta vectorial : igual a la suma y resta de cada componente, se utiliza para calcular la distancia y la dirección relativa entre dos puntos
![]()
Significado geométrico: el vector a se resta del vector b, y el resultado se entiende como un vector que comienza en el punto final de b y termina en el punto final de a. dirección de b a a
Suma de vectores : igual a la suma de cada componente, aplicada al movimiento de objetos
![]()
Significado geométrico: agregue el vector a al vector b, trasládelo para que el punto inicial de b coincida con el punto final de a, y el resultado es un vector con el punto inicial de a como el punto inicial y el punto final de b como el punto final
Multiplicación y división vectorial y escalar
Multiplicación: Multiplica cada componente del vector por un escalar, k[xy,z]= [xk,yk,zk]
División: cada componente del vector se divide por un escalar; [x,y,z]/k = [x/k,y/k,z/k]
Significado geométrico: longitud del vector de escala
pd: cuando desee escalar un determinado vector a una longitud específica, primero puede obtener el vector de dirección del vector y luego multiplicarlo/dividirlo por el factor de escala
public Transform t1, t2, t3;
private void Update()
{
Demo03();
}
//向量运算
private void Demo03()
{
//t1相对于t2的位置
//其大小为两点间距离
Vector3 relativeDirection = t1.position - t2.position;
//t3沿relativeDirection方向移动
if (Input.GetKeyDown(KeyCode.A))
//获取方向向量,避免两物体间距离对速度造成影响
//t3.Translate(relativeDirection.normalized * 0.5f);
t3.position+=relativeDirection.normalized;
Debug.DrawLine(Vector3.zero, relativeDirection);
}
Funciones trigonométricas
medida de angulo
PI=180 grados 1 radián=180 grados/PI 1 ángulo=PI/180 grados
Ángulo --> radianes: radianes = número de ángulos * PI/180
API: Radian = número de grados * Mathf.Deg2Rad
Radianes --> Ángulo: Ángulo = número de radianes * 180/PI
API: ángulo = número de radianes * Mathf.Rad2Deg
private void Demo01()
{
//角度-->弧度:弧度=角度数*PI/180
float d1 = 60;
float r1 = d1 * Mathf.PI / 180;
float r2 = d1 * Mathf.Deg2Rad;
print("角度-->弧度:" + d1 + "-->" + r1 + "/" + r2);
}
private void Demo02()
{
//弧度-->角度:角度=弧度数*180/PI
float r1 = 3;
float d1 = r1 * 180 / Mathf.PI;
float d2 = r1 * Mathf.Rad2Deg;
print("弧度-->角度:" + r1 + "-->" + d1 + "/" + d2);
}Funciones trigonométricas
Estableció la relación entre la razón del ángulo y la longitud del lado en un triángulo rectángulo
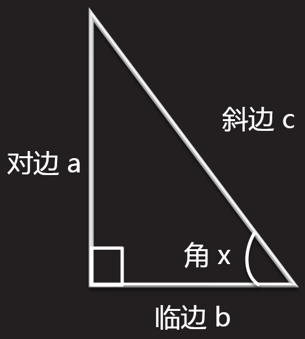
Seno: sen x = a/c
Coseno: cos x = b/c
Tangente: tan x = a/b
API ( en radianes ):
Seno: Mathf.Sin
Coseno: Mathf.Cos
Título: Mathf.Tan
funciones trigonométricas inversas
El término general para funciones como arcoseno, arcocoseno y arcotangente; se puede usar para calcular ángulos en función de la longitud de ambos lados.
Arcoseno: arcsen a/c = x
Coseno inverso: arccos b/c = x
arco tangente: arctan a/b = x;
API ( en radianes ):
Arcoseno: Mathf.Asin
Arco coseno: Mathf.Acos
Arco tangente: Mathf.Atan
private void Demo03()
{
//已知角度x,边长b,求边长a
float x = 50, b = 20;
float a = Mathf.Tan(x * Mathf.Deg2Rad);
//已知边长a,边长b,求角度angle
float angle = Mathf.Atan(a / b) * Mathf.Rad2Deg;
print(angle);
}
private void Demo04()
{
//将自身坐标系转换到世界坐标系中
//Vector3 worldPos = transform.TransformPoint(0, 0, 10);
//计算物体前方30度,10m远的坐标
float x = Mathf.Sin(30 * Mathf.Deg2Rad) * 10;
float z = Mathf.Cos(30 * Mathf.Deg2Rad) * 10;
Vector3 worldPos = transform.TransformPoint(x, 0, z);
print(worldPos);
}Transform.TransformPoint (posición Vector3) : transforma la posición del espacio local al espacio mundial
Operaciones vectoriales (2)
punto multiplicar
También conocido como "producto punto" o "producto interno"

Significado geométrico: el vector unitario de dos vectores se multiplica y luego se multiplica por el coseno del ángulo entre ellos
ab=|a|·|b| porque<a,b>
Aplicación: Calcular el ángulo entre dos vectores; para un vector estandarizado, el resultado del producto escalar es igual al coseno del ángulo entre los dos vectores

API:
Vector3.Dot : el producto escalar de dos vectores. El producto escalar es un valor de punto flotante igual a multiplicar las magnitudes de los dos vectores y luego multiplicar por el coseno del ángulo entre los vectores.
public Transform t1, t2, t3;
//点乘
//计算两向量夹角的cos值
float dot = Vector3.Dot(t1.position.normalized,t2.position.normalized);
float angle= Mathf.Acos(dot)*Mathf.Rad2Deg;pd: la multiplicación de puntos puede calcular el valor coseno del ángulo entre dos vectores, pero no puede determinar el cuadrante del ángulo; si desea determinar el cuadrante del ángulo, debe combinar el producto cruzado del vector
Para un vector estandarizado, si las dos direcciones son iguales, el resultado del producto escalar es 1; de lo contrario, el resultado del producto escalar es -1; el resultado de ser perpendiculares entre sí es 0

producto cruz
También conocido como "producto cruzado" o "producto externo"
![]()
Significado geométrico: el resultado es el vector vertical de la superficie formada por los dos vectores, y el módulo de longitud es el producto del módulo de longitud de los dos vectores multiplicado por el seno del ángulo comprendido
Aplicación: 1. Crear un vector perpendicular al plano 2. Determinar la posición relativa de dos vectores.

API:
Vector3.Cross : el producto cruzado de dos vectores, el producto cruzado de dos vectores genera un tercer vector, que es perpendicular a los dos vectores de entrada
//点乘
//计算两向量夹角的cos值
float dot = Vector3.Dot(t1.position.normalized,t2.position.normalized);
float angle= Mathf.Acos(dot)*Mathf.Rad2Deg;
//叉乘
Vector3 cross=Vector3.Cross(t1.position,t2.position);
if(cross.y<0)
{
angle=360-angle;
}
Debug.DrawLine(Vector3.zero,cross);pd: Oriente el vector resultante de acuerdo con la "regla de la mano izquierda"

La longitud del módulo y el ángulo del vector obtenido por producto cruzado: 0~90 grados

Propiedades y métodos comunes de los vectores
propiedad estática
1. Vector3.up -->nuevo Vector3(0,1,0)
2. Vector3.abajo -->nuevo vector3(0,-1,0)
3. Vector3.izquierda -->nuevo Vector3(-1,0,0)
4. Vector3.derecha -->nuevo Vector3(1,0,0)
5. Vector3.adelante -->nuevo Vector3(0,0,1)
6. Vector3.atrás -->nuevo Vector3(0,0,-1)
método estático
1. Vector3.Lerp y Vector3.Lerp sin sujetar
Vector3.Lerp :
//将物体移动到(0,0,10)
//先快后慢 不能到达目标点(无限接近)
this.transform.position = Vector3.Lerp(this.transform.position, targetPos, 0.1f);Vector3.LerpDesbloqueado :
configuración de parámetros

Haga clic en la propiedad Curva para editar la curva.
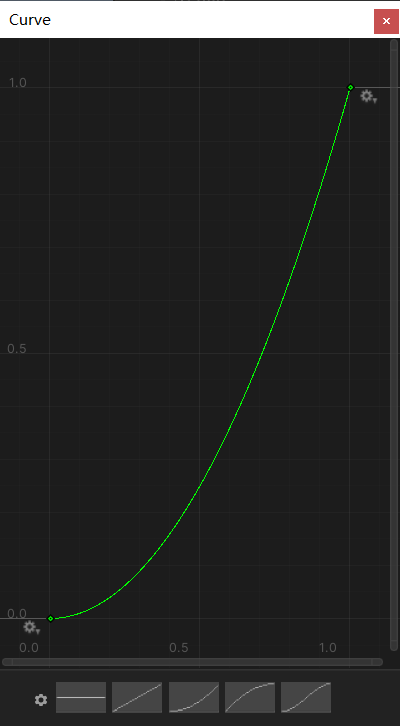
public AnimationCurve curve;
private float x = 0;
//持续时间
public float duration;
x += Time.deltaTime / duration;
//自然运动 起始点固定 终点固定 比例根据曲线变化
this.transform.position = Vector3.LerpUnclamped(Vector3.zero, targetPos, curve.Evaluate(x));2. Vector3.MoveTowards(Vector3 current, Vector3 target, float maxDistanceDelta) : calcula la posición entre el punto especificado por current y el punto especificado por target, y la distancia de movimiento no excede la distancia especificada por maxDistanceDelta
| actual | posición inicial del movimiento |
| objetivo | ubicación objetivo del movimiento |
| maxDistanciaDelta | La distancia recorrida por llamada |
//将物体移动到(0,0,10)
//匀速移动,可到达目标点
this.transform.position = Vector3.MoveTowards(this.transform.position, targetPos, 1);3. Vector3.SmoothDamp(Vector3 current, Vector3 target, ref Vector3 currentVelocity, float smoothTime, float maxSpeed= Mathf.Infinity, float deltaTime= Time.deltaTime): cambia gradualmente un vector al objetivo deseado a lo largo del tiempo
| actual | ubicación actual |
| objetivo | qué tratar de lograr |
| velocidad actual | velocidad actual, este valor es modificado por la función en cada llamada |
| SuavizarTiempo | Tiempo aproximado necesario para llegar a la meta. Cuanto menor sea el valor, más rápido se alcanzará la meta |
| máxima velocidad | Opción para permitir limitar la velocidad máxima |
| tiempo delta | El tiempo desde la última llamada a esta función. Time.deltaTime por defecto |
4. Vector3.Angle(Vector3 from, Vector3 to) : devuelve el ángulo entre dos vectores en grados
| de | vector de origen para medir la diferencia angular |
| a | vector objetivo para medir la diferencia angular |
5. Vector3.ProjectOnPlane(Vector3 vector, Vector3 planeNormal) : Proyecta un vector en un plano definido por una normal (la normal es normal al plano)
| avionNormal | dirección del vector al plano |
| vector | la posición del vector sobre el plano |
public Transform t1;
public Vector3 planeNorm;
private Vector3 targetPos = new Vector3(0, 0, 10);
private void Update()
{
Vector3 res = Vector3.ProjectOnPlane(t1.position, planeNorm);
Debug.DrawLine(Vector3.zero, t1.position);
Debug.DrawLine(Vector3.zero, res, Color.red);
}configuración de parámetros

correr

6.Vector3.Reflect( Vector3 inDirection, Vector3 inNormal): refleja un vector desde el plano definido por la normal
El vector inNormal define un plano (la normal del plano es un vector perpendicular a su superficie), el vector inDirection se considera como una flecha direccional que ingresa al plano y el valor de retorno es un vector con el mismo tamaño que inDirection y la dirección de su dirección de reflexión
