introduction
Vehicle positioning is a technology that allows self-driving cars to know their exact location, and it plays a very important role in the automatic driving system. Vehicle positioning involves a variety of sensor types and related technologies, which can be mainly divided into satellite positioning, inertial navigation positioning, map matching positioning and multi-sensor fusion positioning. Among them, the map matching positioning technology uses road physical information and prefabricated high-precision maps to realize real-time automatic driving positioning.
High-precision positioning is closely related to high-precision maps, providing support for autonomous vehicle route planning, road perception, and driving control.
首先,高精度地图数据的采集、处理、以及地图的建模都需要以高精度的位置坐标作为框架。高精度地图中道路和场景是自动驾驶汽车感知和决策的数据基础。
其次,以高精度地图为基础,结合感知匹配实现高精度的自主导航定位,在定位信号中断或不稳定的情况下,保证自动驾驶汽车仍明确知晓车辆在当前环境中的准确位置。而高精度地图与高精度定位相结合,车辆能够提供了解当前位置可能的道路特征情况,调高传感器的识别精度,降低对于传感器的性能要求。
When there are obvious errors in satellite positioning and inertial navigation systems, map matching and positioning technology can provide real-time positioning correction information for the automatic driving system , so it is very important for the automatic driving system. The following will introduce the introduction, principle, error analysis and commonly used algorithms of map matching positioning technology.
Introduction to Map Matching and Positioning Technology
Whether it is satellite positioning (GNSS) or inertial navigation positioning (INS), errors in the positioning system for autonomous driving are inevitable, and the positioning results usually deviate from the actual position. The introduction of map matching can effectively eliminate system random errors, correct sensor parameters, and make up for the positioning vacuum period when GNSS positioning fails for a long time and INS errors increase sharply in urban high-rise areas, tree-lined areas, overpasses, and tunnels.
**Map matching positioning technology refers to the process of matching the longitude and latitude sampling sequence of the driving trajectory of the autonomous vehicle with the high-precision map road network. **Map matching and positioning technology compares the vehicle positioning information with the road position information provided by the high-precision map, and uses an appropriate algorithm to determine the current driving section of the vehicle and its exact position in the road section, correct positioning errors, and provide reliable basis for automatic driving path planning.
As shown in Figure 1, there are errors in the positioning information of autonomous vehicles due to various reasons. Although the car is driving in the middle lane, the positioning effect is deviated from the actual situation. Using map matching positioning technology can correct the positioning information back to the correct lane and improve positioning accuracy.

Principle of map matching and positioning technology
Map matching positioning is a process of local search of high-precision maps under the condition of known vehicle pose information. First, use the GNSS and INS loaded on the car to make an initial position judgment and determine the local search range of the high-precision map. Then, the real-time lidar data and high-precision map data are transformed into the same coordinate system for matching. After the matching is successful, the vehicle positioning information can be confirmed. The map matching positioning process is shown in Figure 2.

The prefabrication of high-precision maps is the basis of map matching, which needs to include structured semantic features and statistically significant information . The features commonly used in map matching in high-precision maps mainly include lane lines, stop lines, diversion lines, street lights, utility poles and other distinctive objects, and also include statistically significant information such as average reflection value, variance, and average height value.
When there is a large error in the GNSS and INS of the automatic driving system, the car will detect the environmental features based on the real-time perception data. The main detection objects are the lane lines and poles on the ground, and the corresponding elements will be extracted from the corresponding position range of the high-precision map. In the actual matching process, the system compares the detected road features such as lane lines and guardrails with the road features provided by the high-precision map, and corrects the horizontal and vertical positioning of the car, as shown in Figures 3 and 4.


In Figure 3, GNSS locates the car in the left lane of the forward direction. After matching the lane line information detected by the sensor with the high-precision map data, the self-driving car determines that the car is located in the middle lane of the forward direction, which is different from the positioning result of GNSS, and then corrects the lateral pose error. In Figure 4, the vertical correction mainly extracts the road elements detected by the sensor such as billboards, traffic lights, and traffic lights to match with the high-precision map, which can correct the longitudinal error of the car.
Map Matching Positioning Error Analysis
Map matching positioning errors are mainly caused by the correctness of the local search range. The correctness of the local search range, that is, the correctness of road selection, is a great influencing factor in map matching. Only when the road is selected correctly can the subsequent map matching process continue. The reasons for road selection errors mainly include errors caused by road conditions, sensor errors, high-precision map errors, and algorithm errors.
Errors caused by road
conditions The real road conditions are complex and changeable, and it is impossible to guarantee that the car can correctly extract features and achieve correct positioning on various complex road conditions. The change of vehicle speed will affect the quality of the data collected by the sensor. The faster the vehicle speed, the lower the quality, and even cause motion blur and distortion. In a positioning system without INS, car tire drift and road bumps caused by various road conditions may cause distortion, jitter, and motion blur to the laser point cloud data. At the same time, cars sometimes leave the road in actual driving situations, which will cause wrong road matching and cause errors.
Sensor Error
Map matching requires the use of sensor measurement information (such as lidar, camera), and errors in these data will directly affect the positioning speed and success rate.
High-precision map error
In actual use, it is generally assumed that the precision of high-precision maps is higher than that of data obtained by sensors, but in fact, high-precision maps may also have large errors. Errors are introduced even in the case of correct road selection when the map data itself has errors.
Algorithm errors
In the process of map matching, it is inevitable that there will be wrong matches due to the shortcomings of the algorithm, which will have a bad impact on the subsequent map matching and positioning results.
Common Algorithms for Map Matching
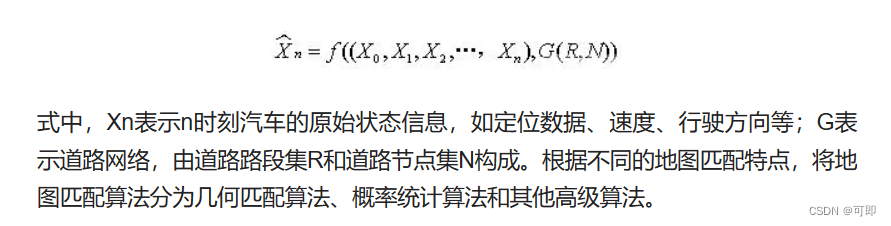
Any map matching algorithm involves two fundamental issues: (1) which road the current car is on; (2) where the current car is on the corresponding road. Therefore, almost all map matching algorithms can be formally described by the following expression:
Geometry matching algorithm
Geometry matching algorithms include point-to-point, point-to-arc and arc-to-arc map matching algorithms.
(1) Point-to-point map matching algorithm
The principle of the point-to-point map matching algorithm is to search for the point with the closest geometric distance between the car positioning point and the position point in the high-precision map as the matching result. The matching accuracy of the algorithm depends on the number of location point sets. With the increase of the number of location point sets, the matching accuracy is higher, but more hardware resources are occupied. The matching results obtained by the point-to-point map matching algorithm are likely to be inconsistent with the actual situation. For example, on a straight road, the GNSS points to be matched will be wrongly matched to the nodes at both ends of the road. The matching accuracy obtained in this way obviously does not meet the actual use requirements.
(2) Point-to-arc map matching algorithm
By looking for the road segment with the closest geometric distance to the vehicle positioning point as a matching line segment, the vehicle positioning point is projected onto the selected segment as the matching result. Curves are linearized and then projected. This algorithm only uses part of the data. When the distance between two curves is small or the same, it is easy to cause a mismatch. When the road network density is high, the accuracy of the matching result will drop sharply. At this time, the algorithm lacks stability.
(3) Arc-to-arc map matching algorithm
Combine the continuous car positioning points into a trajectory curve, and find the closest matching arc to this curve as the matching line segment. Since the method of finding the closest road segment is based on the minimum distance between the matching road segment and the anchor point, if an anchor point is very close to an incorrectly matched line segment, serious errors will result
Probability and statistics algorithm
The probability and statistics algorithm uses the historical trajectory obtained in the car navigation and positioning system to establish a confidence area to match with the high-precision map. The confidence area is selected with reference to GNSS error, vehicle track, vehicle speed and road information, etc. After matching with the high-precision map, the principle of the shortest distance is adopted to determine the matching section.
A complete map matching algorithm based on probability and statistics includes three main processes, namely determining the error area, selecting candidate road sections and calculating the matching position. The general process of map matching based on the probability and statistics algorithm is shown in the figure below: The error area refers to the area that may contain the real position of the car, which should be determined according to the sensor positioning results and error conditions

. The roads within the error area are called candidate road segments, which the map matching algorithm believes contain the true location of the car. The selection method of the matching road section is to select the most likely car driving road section from the candidate road sections. The selection principle is different according to the specific algorithm design. Usually, the selection reference is the similarity between the road shape in the high-precision map and the car trajectory. After determining the matching road section, calculate the most likely position of the car in this road section, and use the matching result to correct the original positioning information and output it.
Other advanced algorithms
In addition to the above two map matching algorithms, there are non-parametric filtering algorithms and parametric filtering algorithms. Nonparametric filtering algorithms include histogram filtering (Histogram Filter, HF) and particle filtering (Particle Filter, PF). Parametric filtering algorithms include Kalman filtering, Extended Kalman Filter (Extended Kalman Filter, EKF), Information Filter (Information Filter, IF), Extended Information Filter (Extended Information Filter, EIF), etc. These algorithms have high matching accuracy in fixed scenarios, but require a large amount of data for pre-learning and summarizing parameters, and have high requirements for the system.
Summarize
Map matching is the key technology of the automatic driving positioning system. In the design of the actual automatic driving positioning system, it is necessary to design the map matching technology in a targeted manner according to the specific hardware conditions and actual working conditions.
Related programs
AutoNavi Technology Analysis: Vehicle Multi-sensor Fusion Positioning Solution Based on GPS+IMU+MM
To achieve map matching and positioning, there must be unified matching elements between the sensor data of the positioning system and the reference map form, such as point cloud positioning elements matching point cloud maps, feature point elements matching feature point maps, and semantic elements matching high-precision maps.
Currently common methods for point cloud matching:
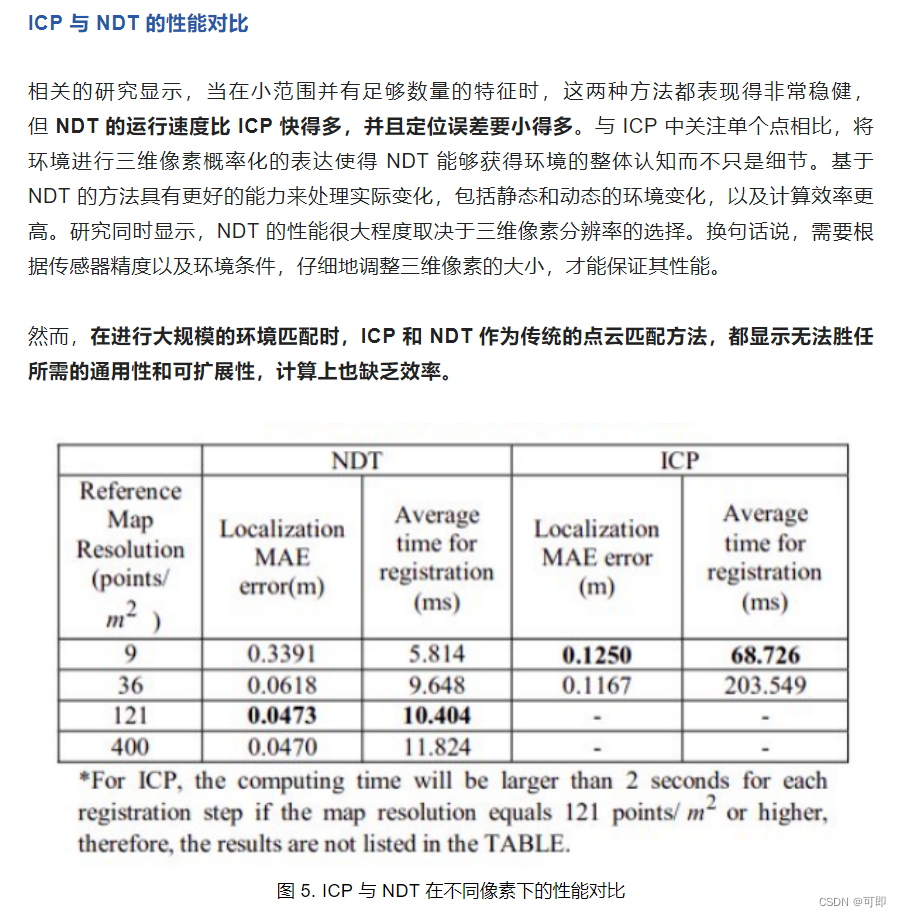
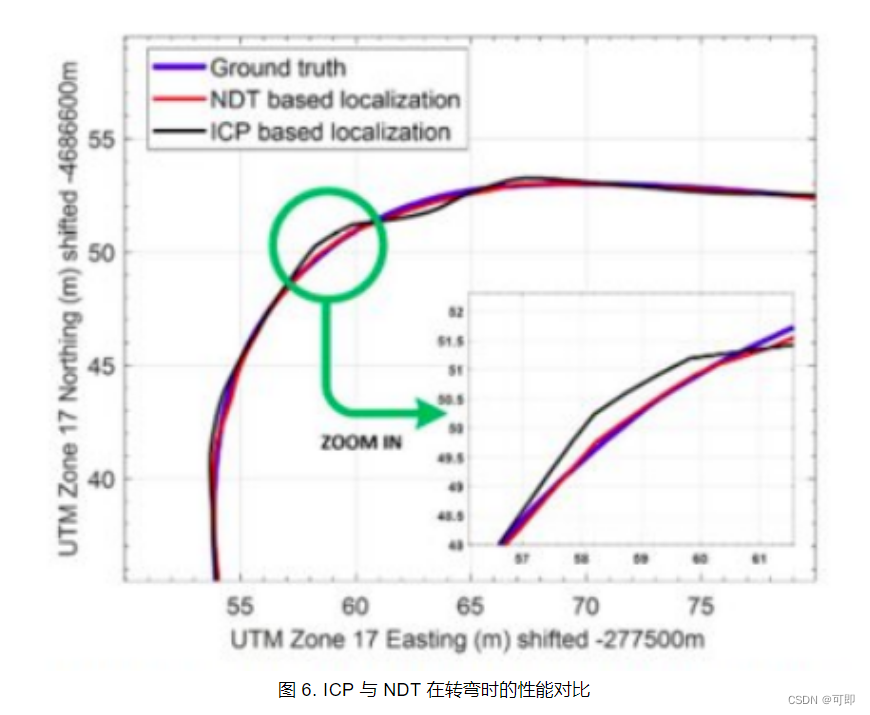
reference link: https://mp.weixin.qq.com/s/kYGNUbezbCi2p8wmBQ2UXw