Exchange group | Enter "sensor group/skateboard chassis group", please add WeChat ID: xsh041388
Exchange group | Enter the "Automotive Basic Software Group", please add WeChat account: Faye_chloe
Remarks: group name + real name, company, position
Author | Xu Liang
Positioning is the basis of high-level autonomous driving, but in scenarios such as high-speed NOA and urban NOA, how to stably achieve high-precision positioning under various working conditions will be a problem. A common question is: How high-precision positioning do high-speed NOA and urban NOA functions need to achieve? How high-precision IMU, integrated navigation and how many sensors are needed?
With these confusions in mind, the author interviewed many experts in the industry.
The answer to the first question is relatively consistent: high-speed NOA only needs to achieve lane-level/decimeter-level positioning, and it is enough to identify which lane the vehicle is in; while under urban NOA, the lanes are relatively narrow, especially at cross roads. At the intersection, lane changes often occur, such as two lanes becoming three or four lanes. At this time, if you want to keep the lane without hitting the lane line, you need to achieve a centimeter-level positioning accuracy.
Regarding the second question "How high-precision IMU, integrated navigation and sensors are needed", the author concluded after communicating with many experts in the industry that it is impossible to determine, because the final positioning accuracy is determined by the combination of integrated navigation, wheel speed sensors, and high-speed sensors. As long as the accuracy of the final fusion positioning can meet the requirements of the matching and positioning results of fine map and vision, laser radar, millimeter wave and other sensors, there are no rigid requirements for the accuracy of each part.
The following figure describes several components of fused positioning .
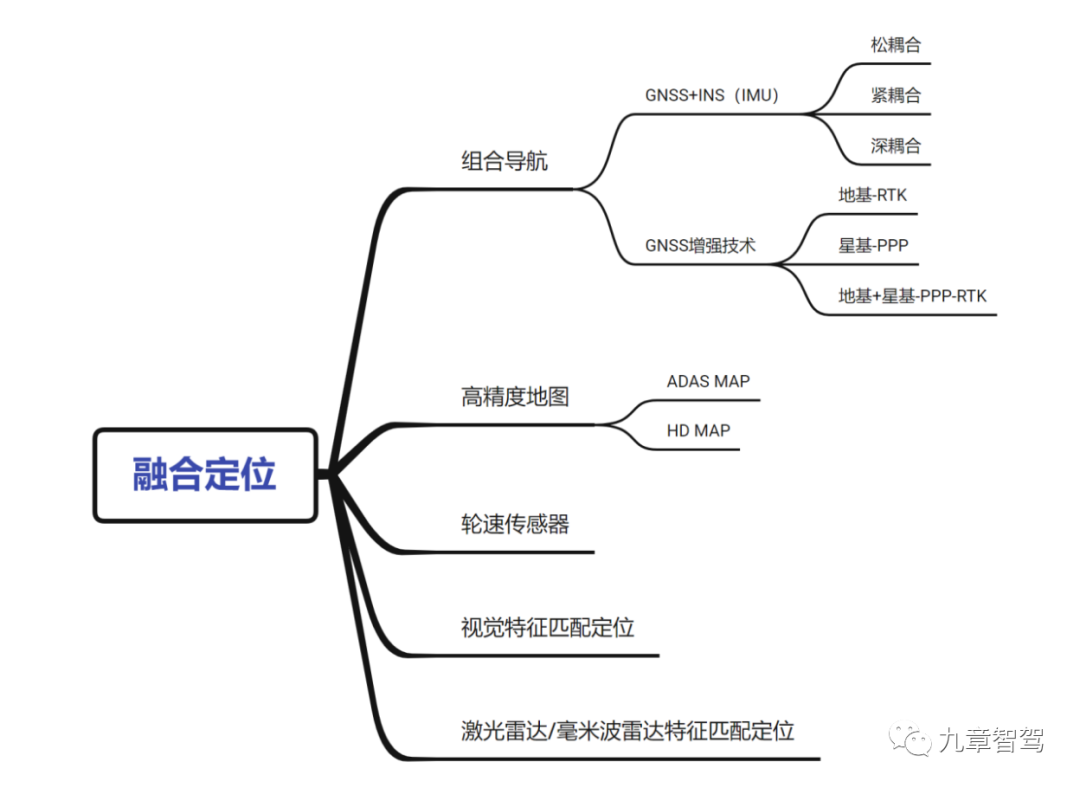
Integrated navigation, in a broad sense, refers to "the combination of two or more dissimilar navigation and positioning systems", such as data fusion of GNSS, IMU, wheel speedometer, Lidar point cloud and other information through algorithms.
Since GNSS and IMU have a very good complementary effect, that is, GNSS complements the cumulative error problem of the IMU inertial system, and IMU well compensates for the instability and interference of the GNSS satellite system, this pair of "golden partners" is also considered It is called the best integrated navigation solution, so when people refer to "integrated navigation", they refer to satellite-habitual integrated navigation (GNSS+IMU). Unless otherwise specified, the "integrated navigation" mentioned below refers to GNSS+IMU.
This paper mainly focuses on the following questions-
one. Why does GNSS have to be dual-frequency?
At present, the GNSS/RTK of domestic mainstream solutions all support dual-frequency multi-constellation.
The so-called multi-constellation means that GNSS receivers can receive signals from different navigation systems such as China's Beidou, American GPS, and European Galileo. Domestic GNSS receivers generally support Beidou and GPS at the same time.
Dual frequency means that each navigation system has two carrier frequency bands. For example, Beidou has two frequency bands, and GPS also has two frequency bands. Dual frequency will greatly increase the cost of hardware and computing power.
So, what is the role of dual frequency?
After communicating with experts in the industry, the author got the answer: on the one hand, the two carrier frequency bands can be redundant with each other; on the other hand, dual-frequency can obtain higher positioning accuracy.
In the GNSS measurement error, the error caused by the ionosphere accounts for a large part, and the dual-frequency carrier can use the correlation between the ionosphere and the delay of electromagnetic waves of different frequencies to eliminate most of the errors caused by the ionosphere, thereby greatly improving satellite positioning. Accuracy, which cannot be achieved by single-frequency GNSS.
The founder of a certain integrated navigation company once publicly mentioned on the forum that the positioning accuracy of single-frequency RTK has a 95% probability of falling within a circle with a radius of 0.4 meters (that is, the concept of precision unit CEP), and the positioning accuracy of dual-frequency RTK can 95% of the probability falls within a circle with a radius of 0.2 meters, which shows the importance of dual frequency.
Two . Space-Based Augmentation and Ground-Based Augmentation
GNSS positioning errors, in addition to the ionospheric errors mentioned above, there are the following types: satellite-related satellite orbit errors (ephemera errors), clock errors of satellite atomic clocks, tropospheric errors, and multipath after carrier reflection Errors due to effects, receiver clocks related to the receiver, etc.
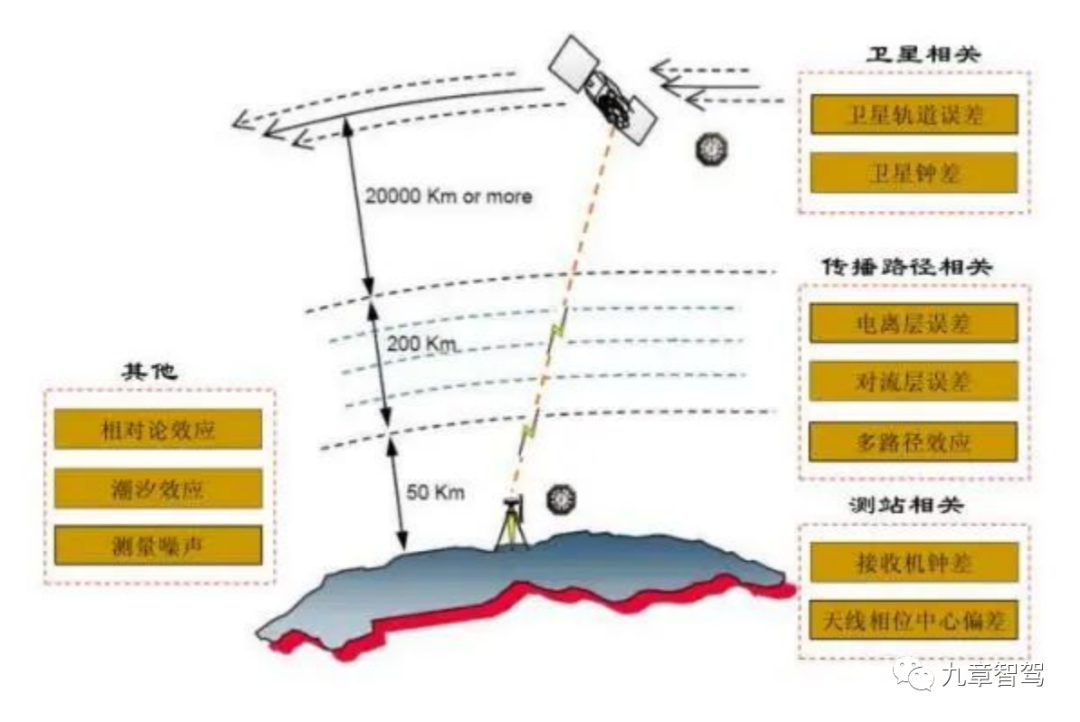
△The source of satellite positioning error
In order to eliminate these errors as much as possible and improve positioning accuracy, in addition to the dual-frequency carrier frequency band mentioned above, there are other enhancement methods, which can be divided into satellite-based enhancement and ground-based enhancement according to their principles.
Among them, the most widely used and representative enhancement methods are ground-based RTK (Real-Time Kinematic, real-time dynamic positioning), satellite-based PPP (Precise Point Positioning, precise point positioning) and the combination of the two PPP-RTK. The specific technical introduction and advantages and disadvantages are as follows:
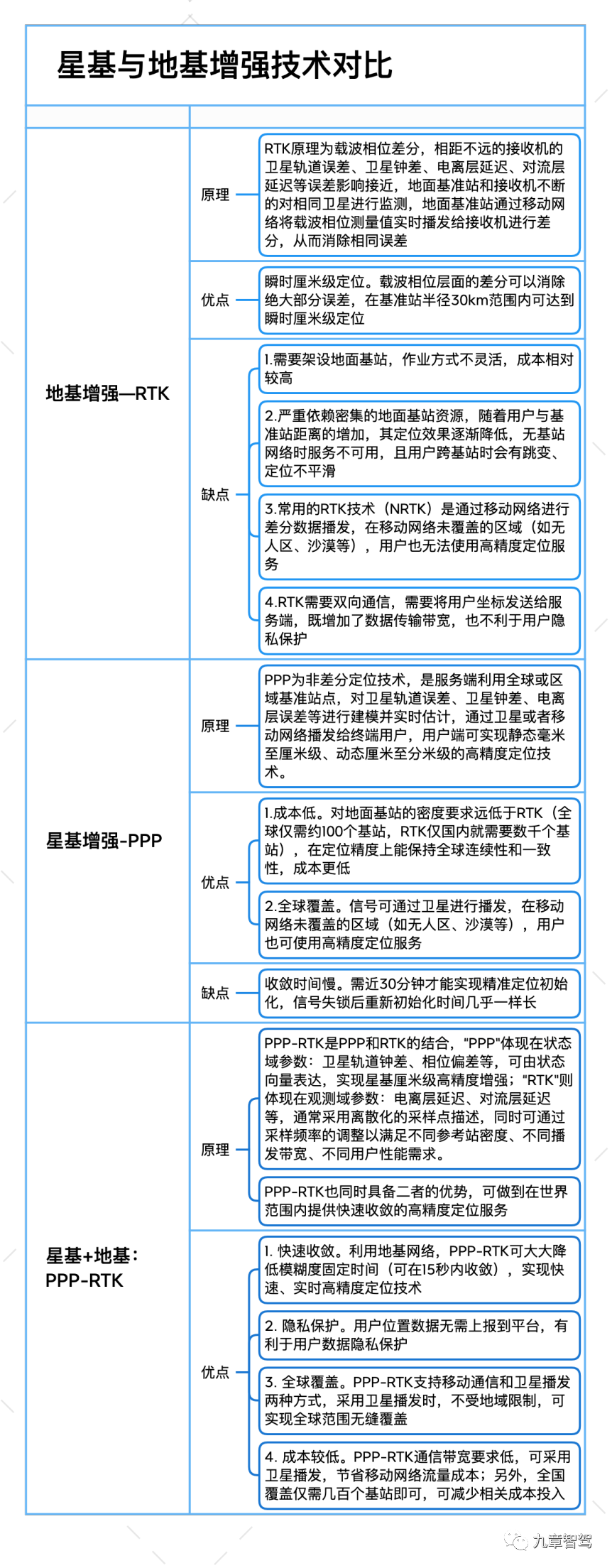
△RTK/PPP/PPP-RTK comparison
Source of information: Jiuzhang Zhijia compiled based on public information and expert interview information
The figure below compares the three modes from the three dimensions of convergence speed , positioning accuracy , and coverage .
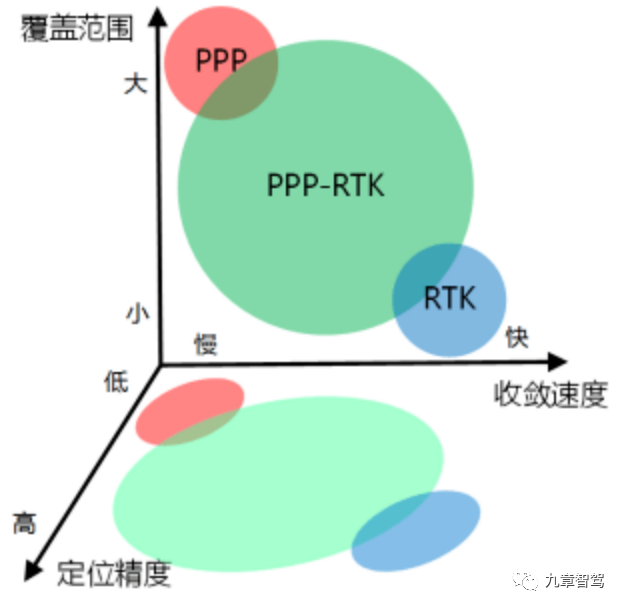
Comparison of △RTK, PPP and PPP-RTK positioning characteristics
(Source: https://www.sohu.com/a/447492212_120381558)
As a powerful combination of RTK and PPP, PPP-RTK not only has the advantages of high precision and fast convergence of RTK, but also has the advantages of global coverage of PPP.
In addition, compared with RTK, PPP-RTK is more in line with the requirements of functional safety. On the one hand, PPP-RTK is not constrained by the coverage of ground base stations and mobile networks (it can be broadcast through satellites); on the other hand, compared with RTK, which packs positioning errors as "black boxes" through differential, PPP-RTK can An error is modeled and estimated on a global scale, and the signal integrity of PPP-RTK allows it to confirm the error status of each signal and identify whether the signal can be converged, used, and detected, so that it is more functional Requirements for item-by-item disassembly of risk factors.
So, compared with RTK, is there an advantage in the cost of using PPP-RTK?
Although the number of ground base stations required by PPP-RTK is much smaller (hundreds of domestic base stations can cover), if you want to use satellites to broadcast signals, you must either rent satellites or launch low-orbit satellites like Shikong Daoyu. It is understood that the cost of renting satellites is high (about 10 million to 20 million per satellite per year), and it is necessary to rent multiple satellites to cover the whole world, and these costs will be included in the service fee.
According to the communication between the author and many industry experts, the cost of PPP-RTK and N-RTK is not much different. If satellite broadcasting is not used, the cost of PPP-RTK is even lower.
Many experts in the industry believe that PPP-RTK is the future development trend. It is understood that there are already many pre-installation and mass production projects in China that have used PPP-RTK technology.
However, what is interesting is that Qianxun, which has already invested heavily in the foundation, is also pushing PPP-RTK to car company customers (according to Qianxun’s official website, Qianxun has built 2800+ foundation enhancement stations). Is this affected by competition? Opponent's strategic influence, have to follow up?
Then, after turning to PPP-RTK, will the resources invested by the pioneers in the ground-based enhanced base station in the early stage be "wasted"?
The author learned from the communication with a senior practitioner of a head location service provider that although theoretically PPP-RTK does not need so many ground base stations, it will still be greatly affected by ground data in terms of convergence speed and position accuracy. Empowerment, the PPP-RTK launched based on the existing high-density ground service, has a much faster convergence speed than similar products of location service providers with less ground density.
three. Can low-orbit satellites improve positioning accuracy?
Some time ago, Geely's Shikong Daoyu launched nine low-orbit satellites, which are said to be mainly used for high-precision positioning of intelligent driving and other functions. At the same time, Tesla's "Starlink" also uses low-orbit satellites to cover the world. So, can low-orbit satellites really improve positioning accuracy?
On this issue, the feedback from experts is relatively consistent, that is, low-orbit satellites mainly play a role in communication, and have no real effect on improving positioning accuracy.
However, although low-orbit satellites cannot improve positioning accuracy, they can indeed enhance the coverage of satellite signals, especially in semi-occluded areas.
A senior practitioner believes that in addition to broadcasting enhanced signals, low-orbit satellites can also use the global satellite navigation system to broadcast carrier information, thereby increasing the number of satellites found by GNSS receivers in a certain area. In some semi-occluded areas, such as under elevated roads, or near windows in buildings, it was impossible to locate or the positioning accuracy was not accurate because there were not enough navigation satellites found. After adding low-orbit satellites, enough satellites can be found , thereby enhancing the usability and reliability of satellite navigation.
Four. Key Specifications and Accuracy Requirements of IMU
As the core device of integrated navigation, IMU can provide higher frequency high-precision signals (generally up to 200Hz), and can be used for high-precision dead reckoning when GNSS signals are invalid or update intervals (GNSS signal frequency is 10Hz). .
The IMU is divided into two parts, the gyroscope and the accelerometer. The gyroscope outputs the roll, pitch and heading angle of the vehicle, and the accelerometer outputs the acceleration in three directions.
The cost of the IMU has risen linearly with the improvement of accuracy, after all, "you get what you pay for."
When you choose an IMU, the most common question is: How high-precision IMU can you choose to meet the requirements? This involves the key performance indicators of the IMU.
IMU has many device indicators, such as zero bias error, scale factor error, nonlinear error, etc. See the figure below for specific indicators and descriptions.
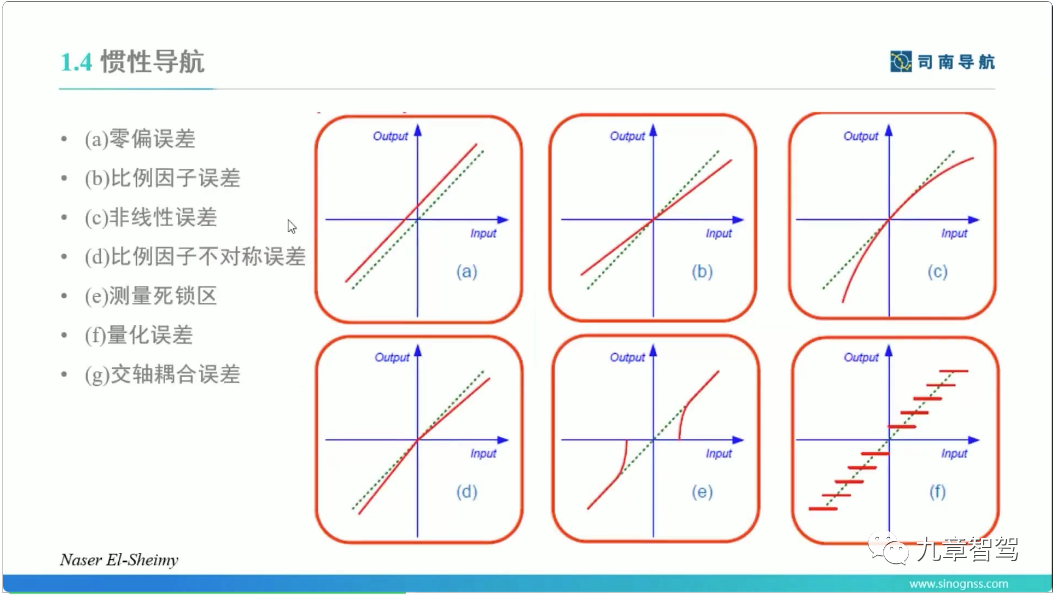
△IMU error index description (quoted from the online sharing of Sinan navigation algorithm engineer)
There are two most critical indicators: 1. Zero bias error; 2. Temperature zero bias.
Zero bias error , that is, there will be a constant error during use, because the error will accumulate over time, so the error needs to be controlled within a certain range. Generally, the zero bias error of the gyroscope is controlled at 2-3 degrees/hour, and the zero bias error of the accelerometer The deviation error is controlled within 0.003g (3mg).
Temperature zero bias is used to measure the sensitivity of the sensor to temperature. The characteristics at different temperatures are different. Generally, the characteristic curve of the sensor is measured and compensated before leaving the factory to reduce the temperature zero bias.
It is understood that the consistency of temperature compensation will change with the length of use, that is, there may be differences between the compensation curve after several years of use and the compensation curve just calibrated.
Habitually, you may be more accustomed to using algorithm indicators to measure IMU, that is, the deviation between the measured value and the true value after the vehicle travels 1000 meters when the GNSS signal is completely lost in the tunnel. The more common index in the industry is about one thousandth to five thousandths (1 sigma).
five. Evolution Trend of GNSS+IMU Coupling Mode
From the perspective of the underlying algorithm, the integrated navigation algorithm can be divided into three types: loose coupling, tight coupling and deep coupling, and the difficulty of algorithm implementation increases in order.
The introduction of several coupling methods is shown in the figure below. For details, please refer to the article "Loose, Tight, and Deep Coupling in High-precision Integrated Navigation" in the previous nine chapters Zhijia.
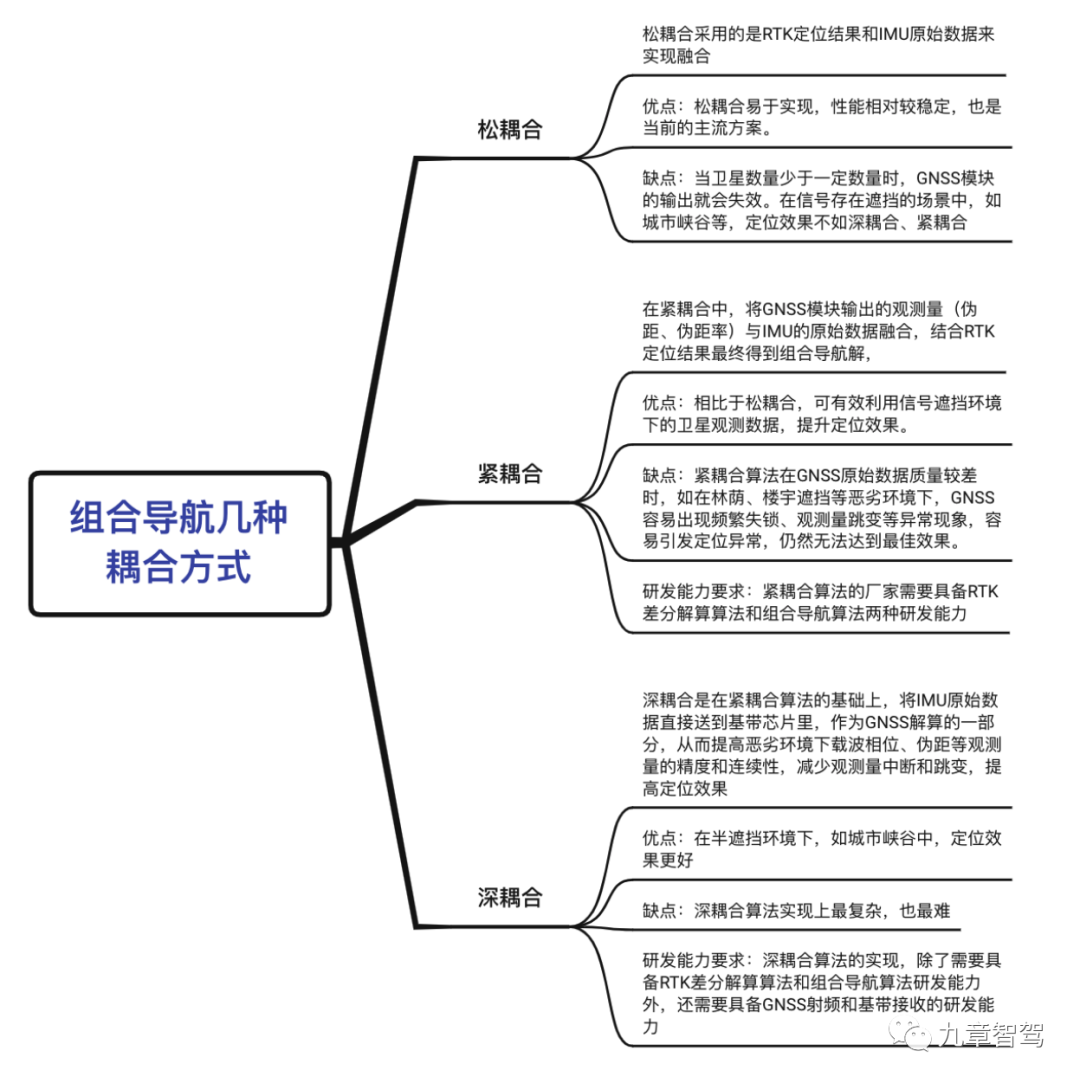
△Several coupling methods of combined navigation
Source of information: Jiuzhang Zhijia compiled based on public information and expert interview information
In semi-occluded scenes, such as urban canyons, deep coupling performs best, followed by tight coupling, and loose coupling is the worst; in fully open and fully occluded scenes, the three coupling methods perform the same. See the figure below for details.
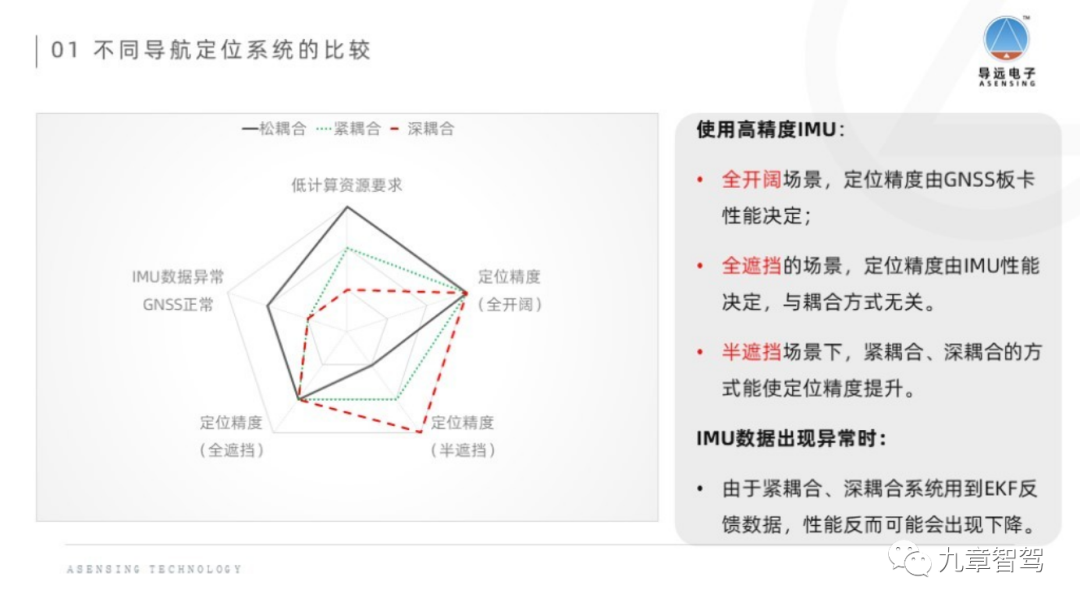
△Comparison of positioning effects of different coupling algorithms
(The picture is quoted from the official website of Guidance Electronics)
When the focus of mass production of pre-installed passenger cars gradually shifts from high-speed NOA to urban NOA, the advantages of deep coupling are reflected at this time.
When communicating with experts in the industry, everyone agrees that deep coupling is better in technical performance, so will deep coupling become a mainstream trend in the future?
There are different voices in the industry, and many experts believe that deep coupling will become a mainstream trend.
However, Li Qingjian, vice president of space-time research and development of China Automobile University, believes that from the perspective of the development trend of autonomous driving domain control, the game between OEMs and suppliers, and the integration of domain control models, the integrated navigation algorithm will be based on the domain control algorithm. Morphology exists.
In the deep coupling mode, it is more difficult to realize the domain control form, and tight combination will become a currently feasible algorithm. In the future, the centralized positioning of satellite navigation, inertial navigation and integrated navigation algorithms may become a thing of the past. If OEMs do not have sufficient development capabilities for deeply coupled algorithm know-how, they will dominate the algorithm and integrate multiple sources such as maps and perception. As a point.
six. Integration Trend of Combined Navigation
Although some car companies are developing their own integrated navigation algorithms, more OEMs will choose an integrator to provide satellite navigation, inertial navigation and integrated navigation algorithms together, which is commonly known as "P-Box" (positioning box) ), and some will also integrate high-precision maps into it, called "map box" (HD MAP BOX).
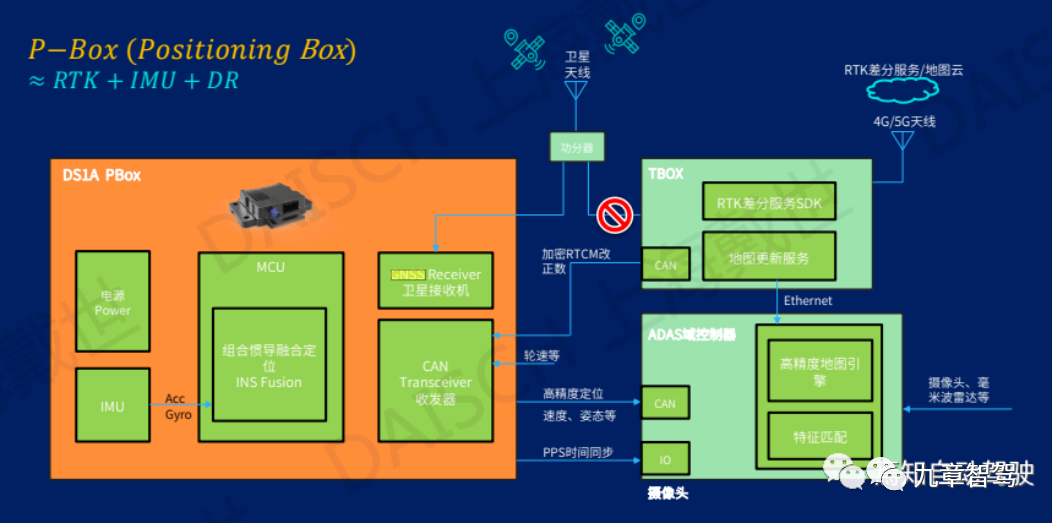
△Daishi Intelligent P-Box Technical Architecture
(Photo source: Yanzhi)
It is generally believed in the industry that the positioning box and the map box are only transitional products. With the gradual maturity of domain controller technology and the evolution of the central integrated architecture, the integration of integrated navigation modules in domain controllers will become the mainstream trend, that is, the integration of integrated navigation algorithms. , GNSS and IMU modules are integrated into the domain controller, or integrated with other devices.
Integration has many advantages.
1. Reduce costs . At present, the common practice of positioning box suppliers is to purchase GNSS modules and IMU modules, put the integrated navigation algorithm in an independent MCU, and integrate them all into the positioning box; in contrast, integrate the integrated navigation algorithm into the In the domain controller, an independent MCU can be saved.
Second, improve the efficiency of data exchange. Integrating the integrated navigation algorithm into the domain controller can reduce the delay of data exchange between the positioning module and other algorithm modules.
Three, convenient layout. With the increasing integration, GNSS and IMU have gradually evolved from the device level to the board level and chip level. Compared with independent positioning boxes, they are integrated in other devices, which is more convenient in layout and has fewer connecting wires.
So, will the integrated navigation integrated in the domain controller become the mainstream trend in the future?
After communicating with many industry experts, the author found that although many car companies have chosen to integrate the IMU and GNSS modules in the domain controller, there are still many engineering challenges in this approach.
The biggest challenge comes from the extremely high requirements of the IMU on the installation location and environment.
First, the IMU has high requirements for the installation location. Because when using the IMU, the automatic driving system defaults that the pose and acceleration of the IMU represent the state of the entire vehicle, so the best installation position of the IMU is the center of the rear wheel axis. Therefore, some industry experts pointed out that whether to integrate the IMU in the domain controller depends on the location of the domain controller. If the location is not suitable, it is not appropriate to integrate the IMU in the domain controller.
In actual operation, if the position is not suitable, the installation position can be calibrated with the ideal position, and then it can be used after coordinate conversion. However, this conversion process will cause the loss of some device accuracy.
Second, the IMU is very sensitive to temperature changes, so the temperature change at the installation site should not be too large. However, due to the high-power SoC inside the domain controller, the temperature changes greatly, which may affect the measurement accuracy of the IMU. In actual operation, although the temperature compensation curve will be calibrated before leaving the factory, it is mentioned above that the temperature compensation curve will change with time, which may increase the error. (Of course, there is also expert feedback. According to feedback from projects that have already been mass-produced, the impact of this error is not great.)
Third, the IMU has high requirements on the flatness and rigidity of the mounting surface. However, due to the large PCB area and insufficient rigidity of the domain controller, the bending deformation during processing will also affect the performance of the IMU, and the vibration in the domain controller will also cause additional noise. This can be optimized by adjusting the mounting position and locally increasing the stiffness.
The installation location of the GNSS module also needs to consider the convenience of layout and integration. For example, some will integrate the GNSS module with V2X and T-Box.
An industry expert believes that after GNSS is modularized, it is small enough to be attached anywhere. Generally, for the convenience of layout, it will be placed closer to the GNSS antenna. Because the GNSS antenna is related to satellite positioning and star search, it will be placed outside. Generally, it is selected to be integrated with 4G antenna, radio antenna (shark fin), etc. If the GNSS module is arranged in the domain controller regardless of the location, the GNSS antenna needs to be connected to the domain controller, and the connection line will be relatively long, which may affect the timing accuracy.
Seven . Independent boxes and integrated trends may coexist for a long time
Corresponding to the trend of integration of positioning boxes, positioning box suppliers hope to continue to maintain the form of independent boxes, which can access more signals and continue to improve positioning accuracy.
For example, the map box launched by Daoyuan not only integrates GNSS, IMU, wheel speed and high-precision maps, but also further integrates ADAS cameras, so that it can further improve positioning accuracy and reliability through visual fusion positioning. At a 95% confidence level, the lateral error is less than 0.2 meters and the longitudinal error is less than 2 meters.
However, an engineer responsible for positioning at a new force car company said that it is completely "unacceptable" for them to entrust the visual fusion positioning to the positioning box supplier. The reason is that, on the one hand, this "is related to who integrates whom", and the responsibility is not easy to distinguish. "If something goes wrong, whether it is a problem with the sensor, a problem with the positioning box, or a problem with the fusion algorithm, it is not easy to judge." ; On the other hand, they do not recognize the image processing capability of the positioning box supplier, and this also involves the waste of computing power caused by the image being processed twice.
Regarding this kind of behavior, an executive of a certain integrated navigation supplier believes that at this stage, traditional car companies or car companies with weak R&D capabilities, when mass-producing high-end intelligent driving, want to more conveniently control costs and improve reliability. Providers can provide overall solutions for positioning, such as integrated satellite navigation, inertial navigation, high-precision maps, and even visual fusion positioning.
The solution of integrating integrated navigation into the domain control, on the one hand, has high requirements on the research and development capabilities of car manufacturers, and on the other hand, it also has high requirements on algorithms such as perception and decision-making. Therefore, if these two requirements cannot be met, handing over the positioning to a third-party supplier is a solution that can achieve rapid mass production with relatively high integration and reliability.
Looking at it, although the integration of positioning modules is a trend in the long run, positioning boxes will still exist for a long time.
Eight . Doing a good job in fusion positioning algorithm can reduce the requirements for key components of integrated navigation
The integrated navigation mentioned above is actually a part of the automatic driving positioning system, and the final system is based on the fusion of various data.
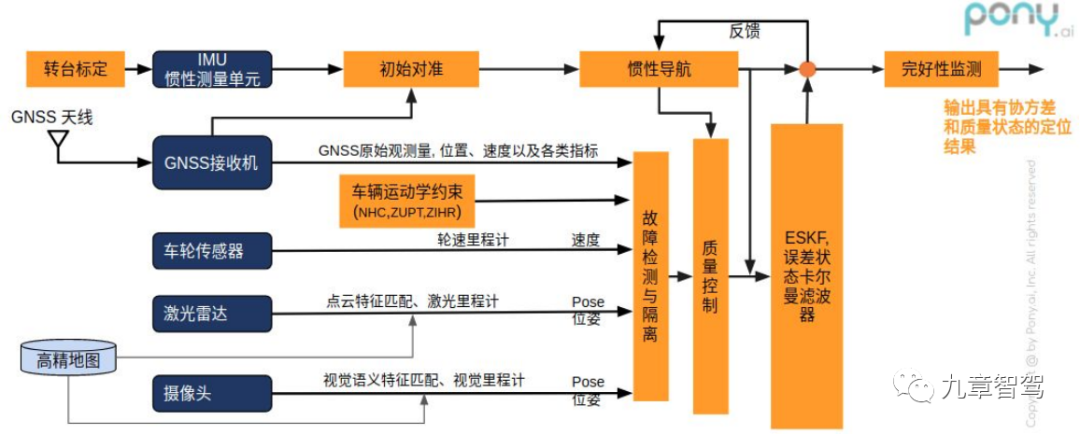
△Pony.ai integrated positioning framework
(Source: Pony.ai account Zhihu article)
Generally, the data used in fusion positioning includes GNSS, IMU, RTK (or PPP-RTK), high-precision maps, wheel speed sensors, lidar, cameras, etc. The final positioning accuracy depends on the positioning accuracy after fusion.
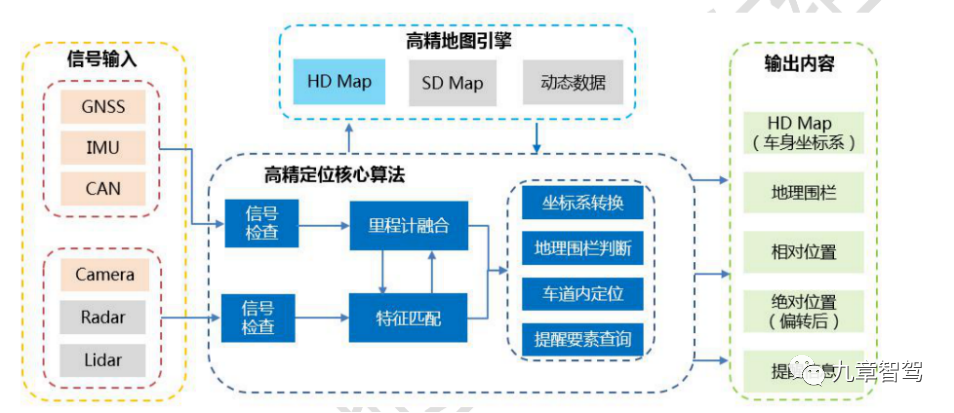
△Apollo integrates high positioning software architecture
(Data source: Apollo official)
It is worth mentioning that in addition to GNSS-based absolute positioning, lateral relative positioning can also be achieved based on the position of the lane line observed by the camera, as well as the surrounding key points observed by using lidar, camera, millimeter-wave radar, etc. Features (such as signs, traffic lights, etc.) are matched with high-precision maps to achieve longitudinal relative positioning (SLAM).
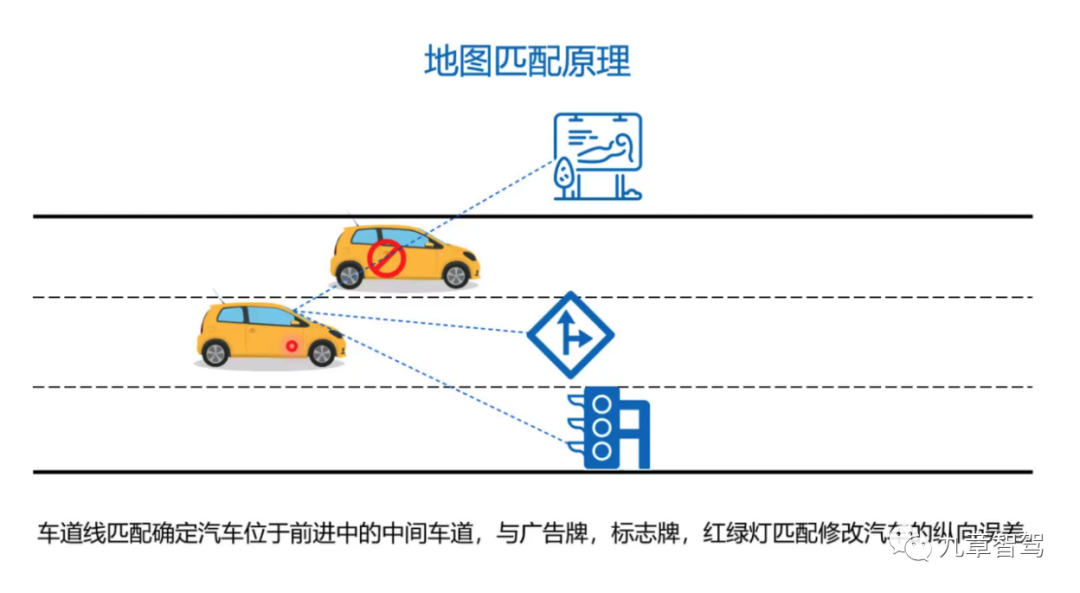
△Relative positioning matching principle
(Source: Liufen Technology's online sharing)
In fact, if the fusion positioning algorithm is done well enough, it can reduce the requirements for key components of integrated navigation (such as IMU accuracy, etc.).
Many experts have said that the high precision of the IMU is mainly to deal with some positioning degradation scenarios - such as tunnels. In the tunnel scenario, only the GNSS values at both ends can be relied on for absolute positioning, and the middle of the tunnel can only rely on the IMU for dead reckoning.
But it is not impossible. An expert from Baidu Apollo mentioned in a sharing: On the one hand, the absolute accuracy requirements in the tunnel are not high, and the curvature of the road will not change too much; on the other hand, more Many features, such as textures, are used to help localization.
Some experts also mentioned that vision and millimeter-wave radar can be used to achieve horizontal positioning in tunnels. As for the accuracy of vertical positioning, "it's actually not that important."
Nine. Can fusion positioning get rid of the dependence on high-precision maps?
In addition to reducing the requirements for integrated navigation, a company that has entered pre-installed mass production of L4 also revealed that it is exploring a solution that does not rely on RTK to realize high-speed NOA functions.
In fact, high-precision positioning is used with high-precision maps. If RTK is unnecessary, is high-precision maps still needed?
Many people in the industry believe that in automatic driving, high-precision maps are a "crutch". The high-precision map is not affected by the environment and is not limited by distance. It can assist perception as input for beyond-horizon perception and effectively compensate for sensors. If you throw away the "crutches" now, there may still be some problems. For example, in real-world roads, you often encounter problems such as large vehicles blocking the road and blurred lane lines. Sensors are often limited by distance and environmental influences.
According to feedback from some industry experts, it is difficult to achieve lane-level positioning due to the lack of high-precision maps (only relying on navigation maps), because there is a lack of lane information in roads on navigation maps, and relative positioning can only be performed through lane information recognized by vision. When encountering street signs and lane line occlusions at intersections, it is difficult to identify the road topology and prone to decision-making and planning errors.
In addition, when driving on a ramp with small curvature, because the navigation map lacks curvature information, the vehicle's horizontal and vertical control will be difficult, and it is easy to have a jagged feel.
From these aspects, a certain degree of "high-definition map" is still needed, but this so-called "high-definition map" may not be as high-precision and complete as the elements provided by current map vendors. It may be used for navigation maps. It is covered with a road semantic map, which can be called "Navigation Map Plus".
In this regard, memory parking provides a good paradigm. Before the memory parking function is turned on, it is necessary to build a map and memorize the route, and then make positioning decision planning based on the built map.
Therefore, referring to memory parking, some solution providers have proposed memory driving function. For urban commuting routes, map construction and route memory are completed after repeated driving several times, that is, a layer of locally constructed semantic map "Navigation Map Plus" is overlaid on the navigation map, and then positioning decisions and planning are made based on this map to realize Point-to-point navigation assistance that does not rely on high-precision maps.
This can achieve a "stand-alone" version of the map to a certain extent. What if we go a step further and share the locally built map to the cloud? Wouldn't that be a crowdsourced map?
In fact, Xiaopeng Motors said that it already supports the parking lot memory parking map sharing function. Users can choose to share the route after learning the route. , you can also use the parking routes uploaded by other users or officially recommended. To a certain extent, this is already a de facto "crowdsourced" map of the parking lot.
Driving and parking, although the functional logic is different, may lead to the same goal in the direction of solving the map problem.
References
1. White Paper on HD Maps for Intelligent Connected Vehicles
2. Pony Tech | Pony.ai Maps and Positioning Series Articles: The Importance of Integrated Navigation in Autonomous Driving Positioning Technology
https://zhuanlan.zhihu.com/p/512611484
3. Special research on the navigation industry: integrated navigation ushers in the era of autonomous driving https://mp.weixin.qq.com/s/juYXHF8JR2EeSPDBjFbFbw
4. Frontline of Sinan Navigation Technology: Live Playback | Integrated Navigation and Intelligent Driving https://mp.weixin.qq.com/s/TwK0A4M35zvVuCg_z2dtyA
5. Beiyun Technology launched a car-level integrated navigation unit to help mass-produced models of autonomous driving
https://mp.weixin.qq.com/s/cmNQ2FiZCUDhJ3fJzYkBIg
6. Guiyuan Electronics: What kind of IMU is needed for automatic driving tight coupling positioning https://zhuanlan.zhihu.com/p/411435503
7. Organization No. 11: GNSS (1), the "umbrella" of the autonomous driving positioning team
https://mp.weixin.qq.com/s/bWbP5prPGDEVfhnbwwN4PQ
8. Organization No. 11: GNSS (2), the "umbrella" of the autonomous driving positioning team
https://mp.weixin.qq.com/s/QOzQ-U6DTii3Fnholo1wmQ
9. Academic Exchange丨From RTK, PPP to PPP-RTK
https://www.sohu.com/a/447492212_120381558
10. Instructions for using the new function of memory parking route sharing - Xiaopeng Community https://bbs.xiaoopeng.com/article/915831
write at the end
communicate with the author
If you want to communicate directly with the author of the article, you can directly scan the QR code on the right and add the author's own WeChat.

Note: Be sure to note your real name, company, and current position when adding WeChat
And the information about the position of interest, thank you!
About Contribution
If you are interested in contributing to "Nine Chapters Smart Driving" ("knowledge accumulation and sorting" type articles), please scan the QR code on the right and add staff WeChat.

Note: Be sure to note your real name, company, and current position when adding WeChat
And the information about the position of interest, thank you!
Quality requirements for "knowledge accumulation" manuscripts:
A: The information density is higher than most reports of most brokerages, and not lower than the average level of "Nine Chapters Smart Driving";
B: Information needs to be highly scarce, and more than 80% of the information needs to be invisible on other media. If it is based on public information, it needs to have a particularly powerful and exclusive point of view. Thank you for your understanding and support.
Recommended reading:
◆ Nine chapters - a collection of articles in 2022
◆ Dedicated to "the first city of autonomous driving" - a "moving the capital"
◆ The 4D millimeter-wave radar is clearly explained in the long text of 4D
◆ Application of deep learning algorithm in automatic driving regulation and control
◆ Challenges and dawn of wire control shifting to mass production and commercial use