角点检测概述
- 角点和直线一样,在自然中重要的一类特征,角点的应用比直线要多一些
- 在
221维视觉和三维视觉中广泛应用,包括日常中的全景拼接都是以角点检测作为基础的
Harris算子原理
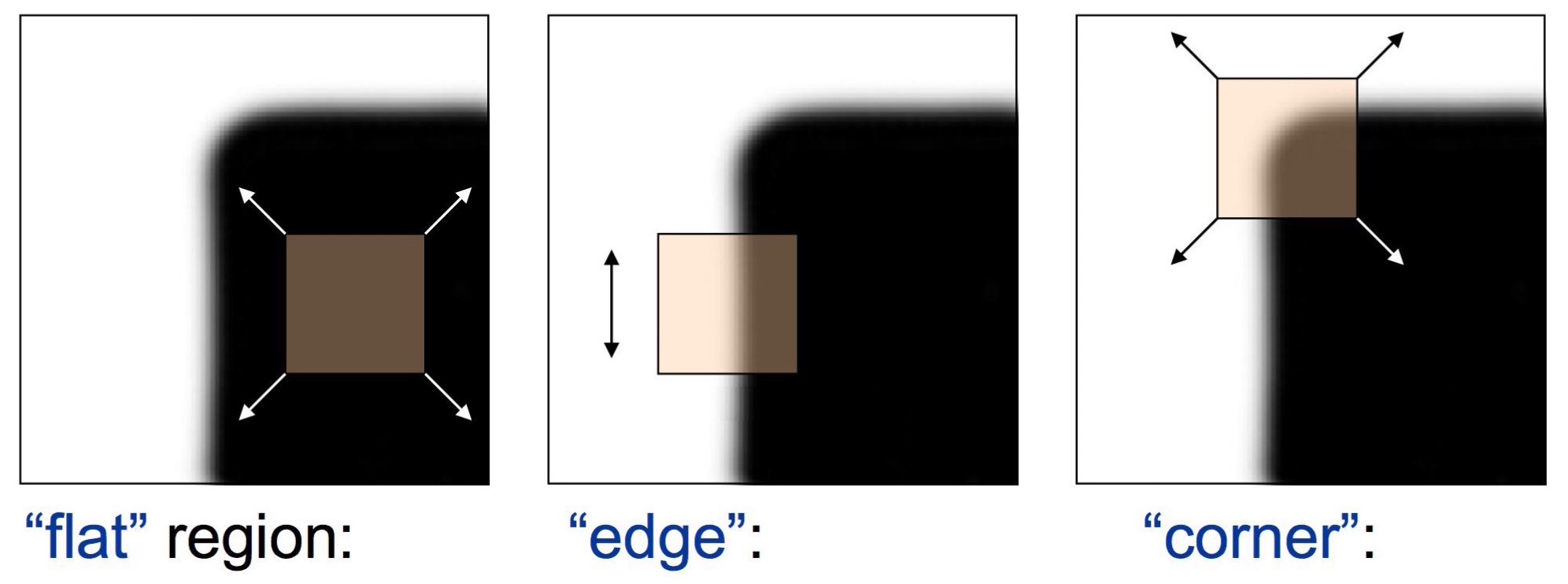
- 通过小方块的所在区域和移动来描述
- 在灰度变化平缓区域,窗口内像素灰度积分(灰度累加值)近似保持不变
- 在边缘区域,上下移动(边缘方向移动)灰度积分近似不变,其余任意方向剧烈变化
- 在角点处,任意方向移动,灰度积分值均剧烈变化
- 定义灰度积分变化
-
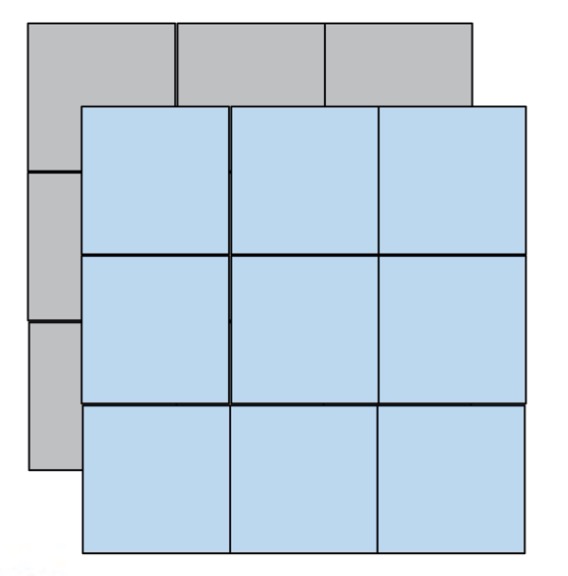
I(x,y) 对应灰色图像
-
I(x+u,y+v) 对应蓝色图像
- u,v对应在x,y方向上平移的分量
- 将蓝色和灰色图像示例代表的灰度值相减
- 加个平方是为了不区分正负, 便于计算
- 然后对这些差值进行累加计算
- w(x,y)是权值
E(u,v)=x,y∑w(x,y)[I(x+u,y+v)−I(x,y)]2
∑[I(x+u,y+v)−I(x,y)]2
≈∑[I(x,y)+uIx+vIy−I(x,y)]2
=∑u2Ix2+2uvIxIy+v2Iy2
=∑[uv][Ix2IxIyIxIyIy2][uv]
=[uv](∑[Ix2IxIyIxIyIy2])[uv]
E(u,v)≅[u,v]M[uv]
M=x,y∑w(x,y)[Ix2IxIyIxIyIy2]
-
权值的作用:在前面举例用到的窗口是3 * 3规格的,在计算角点的时候,我们往往考虑3 * 3窗口的中心点是不是我们最终要检测的角点, 这样越往边上对我们中心点的影响就越小, 这里
w(x,y)是权重的系数,它标志着我们检测角点时,计算的方格内的灰度累加值,越往边上它的贡献值越小
-
只有灰度积分在任意方向变化比较剧烈时,我们才认为它是一个角点,我们接下来要度量,怎么知道
E(u,v)沿着任意的方向变化都比较剧烈
-
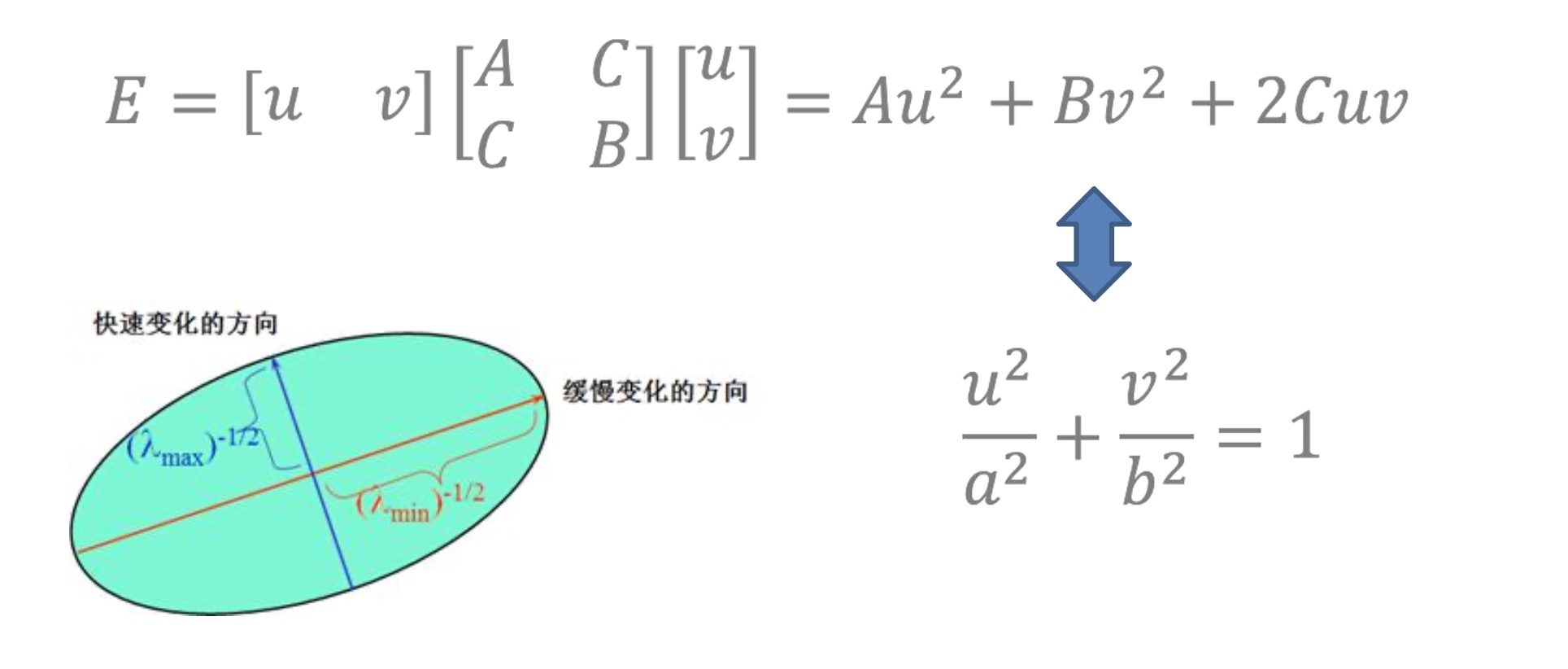
E是一个二次型,即
-
上图
Au2+Bv2+2Cuv是一个对应椭圆的方程, 忽略参数
2Cuv和下面的方程可以相互转换
-
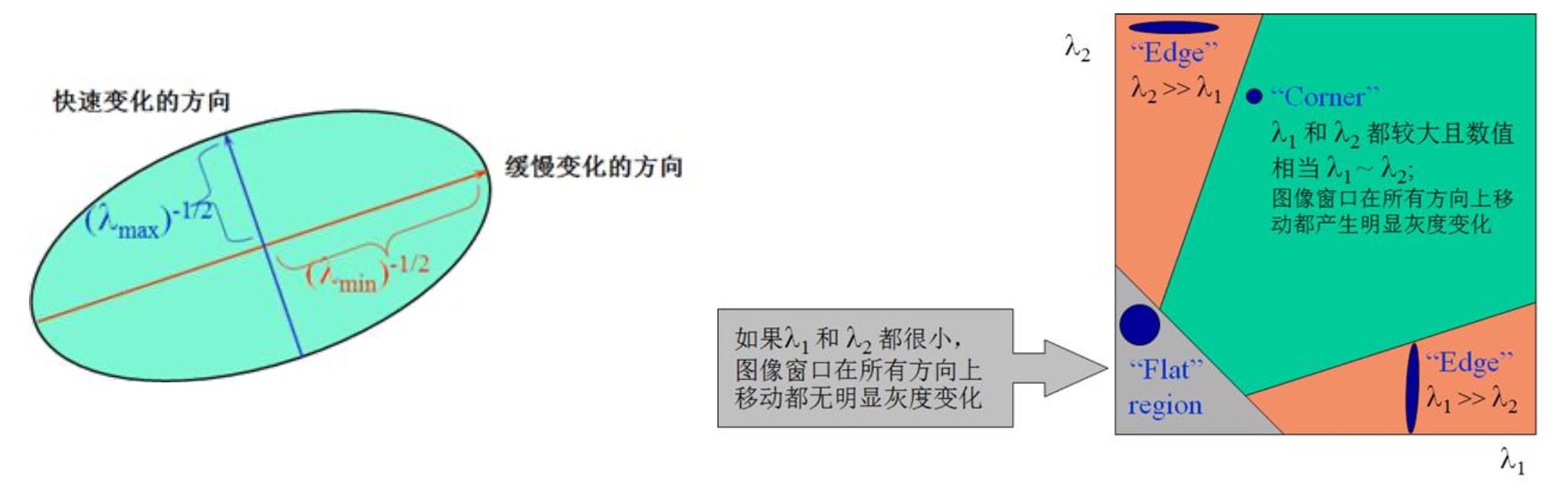
A越大, a越小,形成反比例的关系
-
椭圆图上的橙色和蓝色的两个轴对应的是a和b, 比如轴a越短,对应的A越大,说明E变化的越快速, 所以蓝色轴短代表它对应快速变化的方向
-
2Cuv是u和v的耦合项,对应了坐标旋转,导致了椭圆的歪
-
从2 * 2的矩阵M中分离出A和B, 分离的方式是采用特征值分解, 进一步可以证明对应2 * 2的矩阵M 有两个特征值
λ1、
λ2
-
λ1−1/2 和
λ2−1/2 是椭圆的长短轴
- 当
λ1,λ2都比较小时, 点
(x,y) 处于灰度变化平缓区域
- 当
λ1>>λ2 或者
λ1<<λ2时,说明一个方向变化剧烈,点
(x,y)为边界像素
- 当
λ1,λ2都比较大,且近似相等时,有个比较小的u,v, E值就会产生比较大的变化, 点
(x,y)为角点
-
在实际应用中
λ1 和
λ2 的小和大比较抽象, 在实际计算时,就会出现问题, 不同场景中有不同的结果, 我们希望一个智能自动的算法,Harris提出了一个角点响应函数的概念
R=detM−k(traceM)2
traceM=λ1+λ2
detM=λ1λ2
- 当R接近于零时,处于灰度变化平缓区域
- 当R<0时,点为边界像素
- 当R>0时,点为角点
- k是一个经验性的系数,通常取值0.04~0.45
OpenCV实现
-
c++版本
void cornerHarris(InputArray src, OutputArray dst,
int blockSize, int ksize, double k, int borderType=BORDER_DEFAULT );
src,输入图像,即源图像,填Mat类的对象即可,且需为单通道8位或者浮点型图像dst,函数调用后的运算结果存在这里,即这个参数用于存放Harris角点检测的输出结果,和源图片有一样的尺寸和类型blockSize,表示邻域的大小,更多的详细信息在cornerEigenValsAndVecs中有讲到ksize,表示Sobel()算子的孔径大小- k,Harris参数
borderType,图像像素的边界模式,注意它有默认值BORDER_DEFAULT。更详细的解释,参考borderInterpolate函数
-
python版本
dst = cv.cornerHarris( src, blockSize, ksize, k[, dst[, borderType]] )
示例
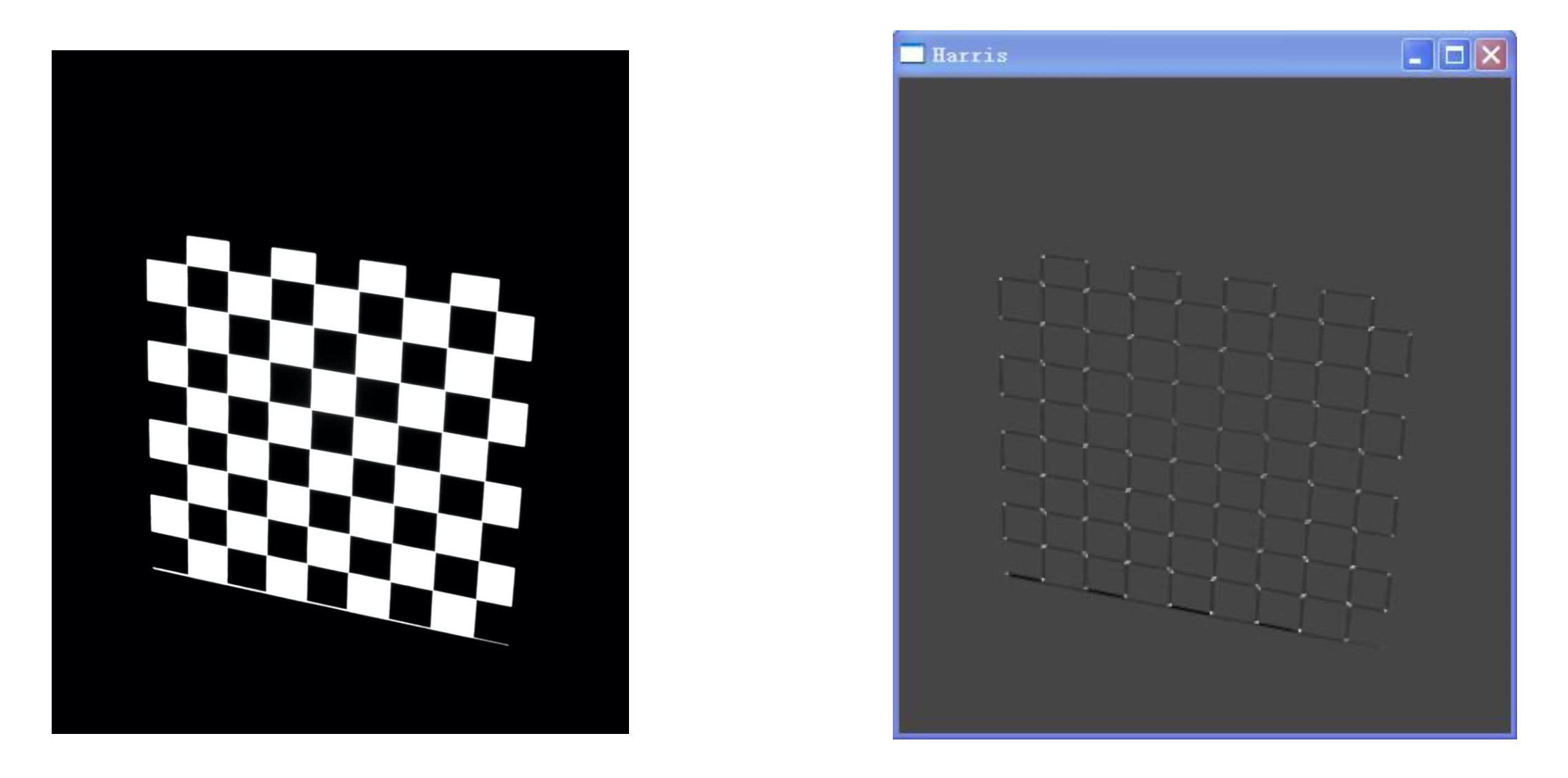
1 ) 棋盘格
- 棋盘格是一类比较好的测试角点检测的测试图像
- 它的角点是非常的清晰,角点检测算子应该对棋盘格得到一个比较准确的结果
- 在右边每个对应的白点就是检测的结果,没有漏检和误检
2 ) 房屋
- 右图每个红圈对应我们的角点检测结果
- 左侧图的角点在右边基本都能够检测出来
- 在石头的位置出现了误检
- 在窗户上有一些漏检
- 所以对于真实场景,Harris角点检测有进一步提高的地方
总结
- Harris角点检测算子的角点定义是在角点位置通过一个小窗口,在小窗口内部的灰度积分在任意方向的变化都比较剧烈
- 进一步检测灰度变化是否剧烈, 采用了对矩阵M计算特征值的方法
- 使用角点响应函数计算当前点是否是角点