平台:Windows 10 20H2
Visual Studio 2015
OpenCV 4.5.3
原理
Harris算子是对Moravec算子的改进,包括:
(1)Harris算子用高斯函数代替Moravec算子的二值窗口函数,如下图所示,窗口函数应对离中心点越的像素赋予越大的权重,以减少噪声影响;

图1
对于图像I(x,y),当在点(x,y)处平移(u,v)后的自相似性,可以通过自相关函数给出:

其中,w(x,y)是以点(x,y)为中心的窗口加权函数,它既可是常数(图1左),也可以是高斯加权函数(图1右)。高斯函数的表达式如下:

(2)Moravec算子只考虑每隔45度方向,Harris用Taylor展开去近似任意方向;
利用泰勒级数将I(x+u,y+v)展开得:

则E(u,v)表达式可以更新为:

其中,Ix为x方向的差分(一阶微分近似),Iy为y方向的差分,w(x,y)为高斯函数。通过推导,E(u,v)以矩阵的形式表示为:

矩阵M为实对称矩阵,且

则E(u,v)化简为二次项函数:

二次项函数本质上就是一个椭圆函数。椭圆的扁率和尺寸是由M的特征值\lambda _1,\lambda _2决定的,椭圆的方向是由M的特征向量决定的,如图2所示。

图2
椭圆函数特征值与图像中的角点、直线(边缘)和平面之间的关系如图3所示。共可分为三种情况:
1)图像上的直线。一个特征值比较大,另外一个特征值比较小;自相关函数在某一个方向上大,在另一个方向上小。
2)图像中的平滑区域。两个特征值都小,且近似相等;自相关函数值子各个方向上都小。
3)图像中的角点。两个特征值都比较大,且近似相等,自相关函数在所有方向上都增大。

图3
(3)角点响应函数
根据二次项函数特征值的计算公式,我们可以求M矩阵的特征值。但是Harris给出的角点差别方法并不需要计算具体的特征值,而是计算一个角点响应值R来判断角点。R的计算公式为:

其中,detM为矩阵M的行列式,traceM为矩阵M的迹,k为常数,取值范围为0.04~0.06。事实上,特征是隐含在detM和traceM中,因为
其实,角点量R的计算方式可以自由发挥,只要能反应角点的特征即可。例如,Nobel于1988年提出利用如下公式计算角点的响应值,无需设定参数k的值:
采用上述公式计算角点的CRF值,从而避免的参数k对角点选取的影响,在实际应用中,通常选用这个改进的Harris角点检测算法进行检测:当cim值大于预定的阈值,则该点为角点候选点,通过非极大值抑制挑选出最终的角点。
此外,或如式(1.12)计算R值,也无需考虑参数k。
4)最后设定R的阈值进行角点判断,以及角点的极大值抑制等。
算法步骤
输入:源单通道图像,参数k

输出:角点检测图
具体步骤:
(1)计算图像I(x,y)在X和Y方向的梯度Ix和Iy;
(2)计算梯度方向的乘积;

(3)使用高斯核进行加权,计算矩阵M的元素A,B,C;
(4)计算角点响应函数R,并设定阈值,当R小于阈值时,不是候选角点;

(5)进行局部极大值抑制。
算法结束。
优缺点
Harris角点检测算法有诸多优点,但也有不完善的地方。
(1)Harris角点检测算子具有旋转不变性
Harris角点检测算子使用的是角点附近的区域灰度二阶矩矩阵。而二阶矩矩阵可以表示成一个椭圆,椭圆的长短轴正是二阶矩矩阵特征值平方根的倒数。当特征椭圆转动时,特征值并不发生变化,所以判断角点响应值R也不发生变化,由此说明Harris角点检测算子具有旋转不变性。
(2)Harris角点检测算子对灰度平移和灰度尺度变化不敏感
这是因为在进行Harris角点检测时,使用了微分算子对图像进行微分运算,而微分运算对图像亮度的抬高或下降(I=I+a)、密度的拉升或收缩(I=bI)不敏感。换言之,对亮度和对比度的仿射变换并不改变Harris响应的极值点出现的位置,但是,由于阈值的选择,可能会影响角点检测的数量。
(3)Harris角点检测算子不具有尺度不变性
如图4所示,当图像被缩小时,在检测窗口尺寸不变的前提下,窗口内所包含图像的内容可能是完全不同的。左侧的图像可能被检测为边缘或曲线,而右侧的图像则可能被检测为一个角点。或者说如果图像尺度发生变化,原来是角点的点在新的尺度可能就不是角点了。

注:尺度不变性问题可通过图像金字塔解决,例如,在运算的开始先将图像转化到尺度空间表示,即将原图像进行尺度变换,而尺度变换的方式就是源图像与尺度核函数做卷积运算:

其中,sigma表示尺度。然后使用L代替原图像去进行运算,尺度为运算的参数。
Harris角点本身就不受光照,旋转的影响,现在又使其满足尺度不变性,至此,Harris角点可以成为一个优秀的特征了。
源码
/**********************************************************************************
*函数 Mat detectHarrisCorners(const Mat& imgSrc, double alpha)
*输入:
*imgSrc : 源单通道图像
*alpha : Harris响应函数参数
*输出
*imgDst : 提取到角点的图像
***************************************************************************************/
#include <iostream>
#include "opencv2/opencv.hpp"
using namespace cv;
using namespace std;
Mat detectHarrisCorners(const Mat& imgSrc, double alpha)
{
Mat gray;
gray = imgSrc.clone();
gray.convertTo(gray, CV_64F);
Mat xKernel = (Mat_<double>(1, 3) << -1, 0, 1);//水平方向模板计算Ix
Mat yKernel = xKernel.t();
Mat Ix, Iy;
filter2D(gray, Ix, CV_64F, xKernel);
filter2D(gray, Iy, CV_64F, yKernel);
Mat Ix2, Iy2, Ixy;
Ix2 = Ix.mul(Ix);
Iy2 = Iy.mul(Iy);
Ixy = Ix.mul(Iy);
Mat gaussKernel = getGaussianKernel(5, 1);//获得高斯核size=5,sigma=1
filter2D(Ix2, Ix2, CV_64F, gaussKernel);
filter2D(Iy2, Iy2, CV_64F, gaussKernel);
filter2D(Ixy, Ixy, CV_64F, gaussKernel);
Mat cornerStrength(gray.size(), gray.type());
for (int i = 0; i < gray.rows; i++)
{
for (int j = 0; j < gray.cols; j++)
{
double det_m = Ix2.at<double>(i, j) * Iy2.at<double>(i, j) - Ixy.at<double>(i, j) * Ixy.at<double>(i, j);//行列式
double trace_m = Ix2.at<double>(i, j) + Iy2.at<double>(i, j);//迹
cornerStrength.at<double>(i, j) = det_m - alpha * trace_m *trace_m;//响应函数值R
}
}
double maxStrength;
minMaxLoc(cornerStrength, NULL, &maxStrength, NULL, NULL);
double qualityLevel = 0.1;
double thresh = qualityLevel * maxStrength;// 设置threshold
Mat dilated, localMax;
//默认3 * 3核膨胀,膨胀之后,除了局部最大值点和原来相同,其它非局部最大值点被3*3邻域内的最大值点取代
dilate(cornerStrength, dilated, Mat());
//与原图相比,只剩下和原图值相同的点,这些点都是局部最大值点,保存到localMax
compare(cornerStrength, dilated, localMax, CMP_EQ);
//和局部最大值图与,剩下角点局部最大值图,即:完成非最大值抑制
Mat cornerMap;
cornerMap = cornerStrength > thresh;
bitwise_and(cornerMap, localMax, cornerMap);
vector<Point> points;
for (int y = 0; y < cornerMap.rows; y++)
{
const uchar* rowPtr = cornerMap.ptr <uchar>(y);
for (int x = 0; x < cornerMap.cols; x++)
{
//非零点就是角点
if (rowPtr[x])
points.push_back(Point(x, y));
}
}
//画角点
Mat imgRGB = imgSrc.clone();
cvtColor(imgRGB, imgRGB, COLOR_GRAY2RGB);
vector<Point>::const_iterator it = points.begin();
while (it != points.end())
{
circle(imgRGB, *it, 3, Scalar(0, 0, 255), 1);
++it;
}
return imgRGB;
}
int main()
{
Mat gray = imread("D:\\Work\\OpenCV\\Workplace\\Test_1\\3.jpg", 0);
if (!gray.data)
return -1;
imshow("grayImage", gray);
double time0 = static_cast<double>(getTickCount());
Mat HarrisImage = detectHarrisCorners(gray, 0.05);
time0 = ((double)getTickCount() - time0) / getTickFrequency();
cout << "runtime :" << time0 << "s" << endl;
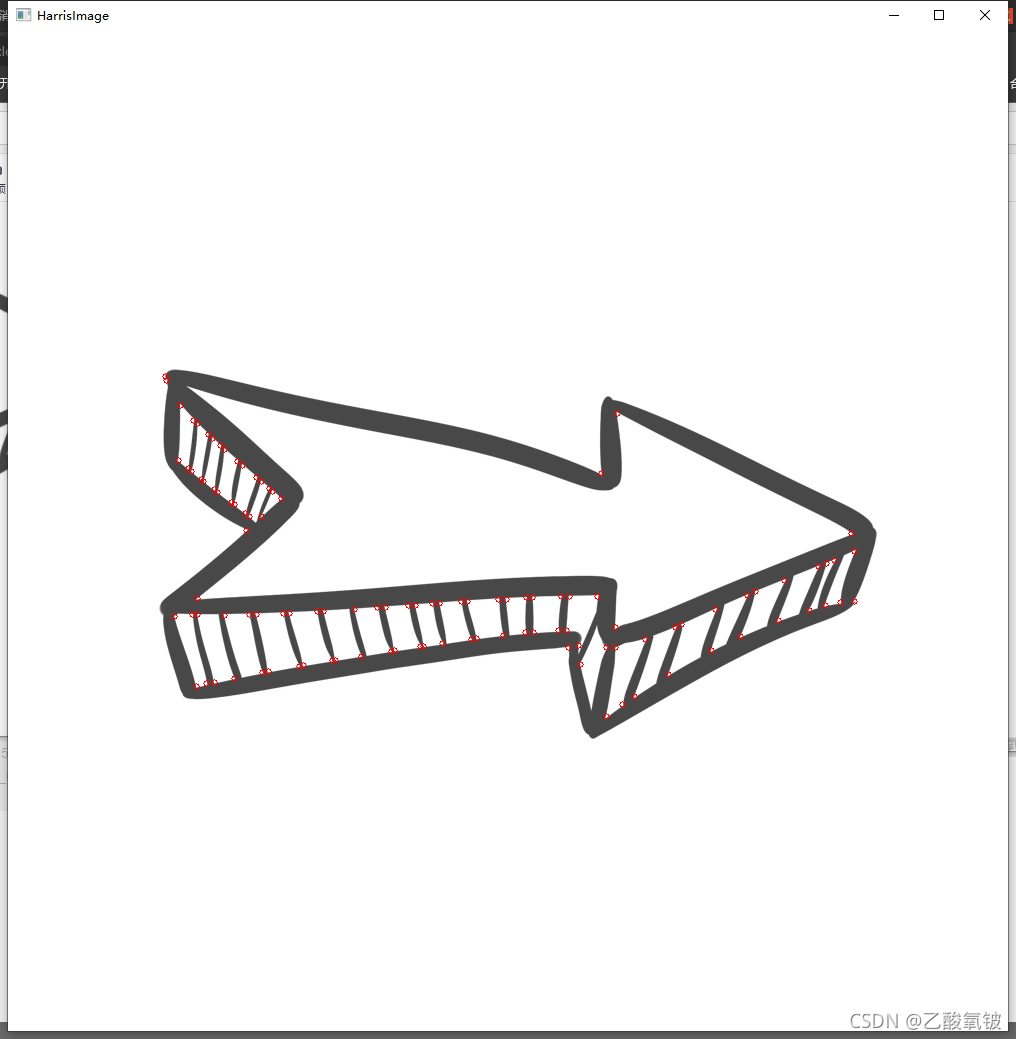
imshow("HarrisImage", HarrisImage);
waitKey(0);
return 0;
}
效果
原图
输出