目录
前言
刚来H时,就有很多课想旁听,但是十一月考试多,差点考废了。
那之后,有幸开始旁听《机器视觉》,能坚持到现在也算是不错。
因为之前看过《数字图像处理》和《计算机视觉》,进度还能跟得上。
课间让老师帮我解决了本科毕设和暑假对于频谱图和Hough变换的部分疑惑,特此记录。
第 1 章 机器视觉概述
美国制造工程师协会(SME)机器视觉分会和美国机器人工业协会 (RIA)自动化分会 : "机器视觉是通过光学装置和非接触式的传感器,自动获取和处理一幅真实物体的图像,以获得所需信息来用于控制机器运动的装置。”
图像处理软件是否先进是机器视觉应用成功的关键 。
第 2 章 图像采集
光学系统设计的成败是决定整个机器视觉 系统成败的首要因素!
光学系统核心器件选型:光源、镜头、相机、采集卡
第 3 章 图像基本操作
灰度变换
直方图规定化:将原始图像的直方图转换为期望的直方图的形状,从而有选择的增强某个灰度值范围内的对比度
几何变换
灰度插值
第 4 章 图像平滑与数学形态学
4.1 空间滤波
正如之前我写的某篇博客链接1的 点、线和边缘检测 个人笔记(含Sobel和Laplace等算子、Marr-Hildreth和Canny实现及Hough变换) 提到的图像卷积,在此再强调一次。
相关:滤波器模版移过图像并计算每个位置乘积之和的处理
一个函数与离散单位冲激相关,在该冲激位置产生这个函数的一个翻转的版本
卷积:滤波器首先旋转180°,再移过图像并计算每个位置乘积之和的处理
一个函数与离散单位冲激卷积,在该冲激位置产生这个函数的一个拷贝的版本
参考链接2的动画,可以帮助大家更好的理解图像卷积这一操作。
反锐化掩蔽:长期以来在出版业中使用的图像锐化是将图像模糊形式从原始图像中去除
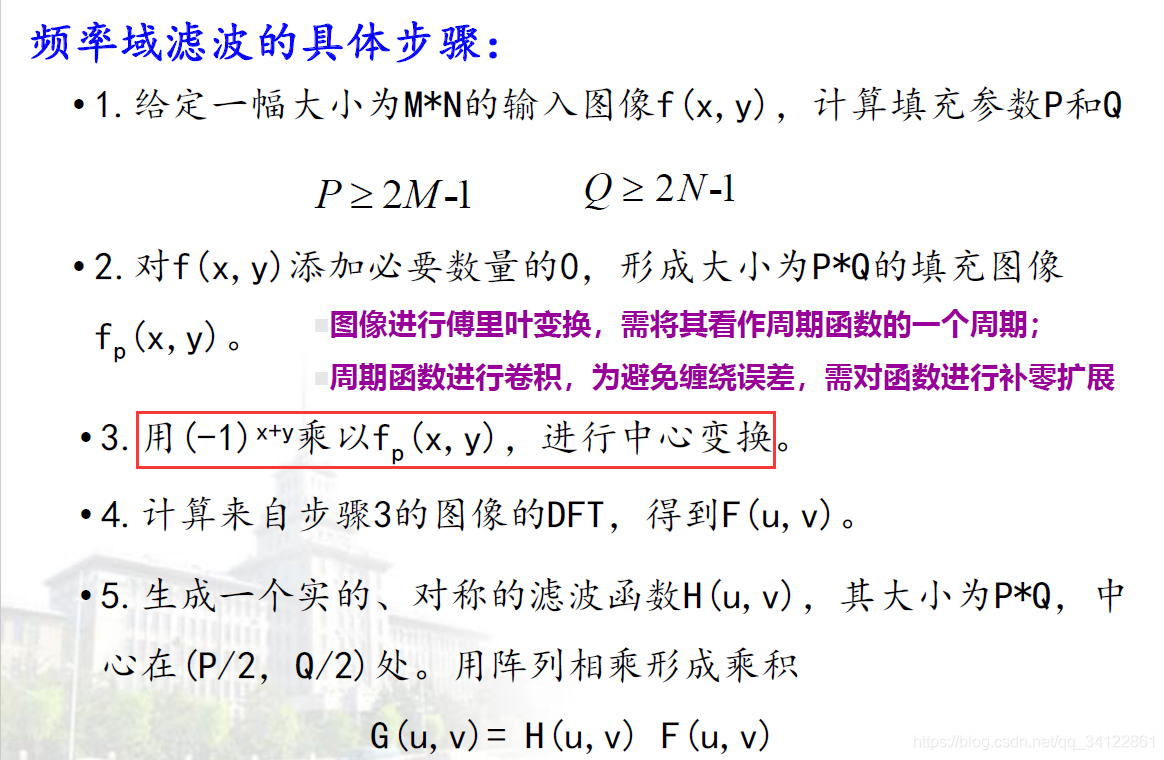
4.2 频率域滤波
图像频率是指单位长度内亮度做周期性变化的次数,它反映了图像的像素灰度在空间中的变化情况 。
可以利用频率成分和图像外表之间的对应关系。一些在空间域表述困难的增强任务,在频率域中变得非常普通。
F(u,v)失去了空间关系,表示的是图像所有点在u,v频率上的分量。
图像经傅里叶变换后,直流分量正比于图像的均值。
因为人的视觉可分辨的灰度有限, 频谱的显示都要取个log :
D(u,v)=log( 1+|F(u,v)| )
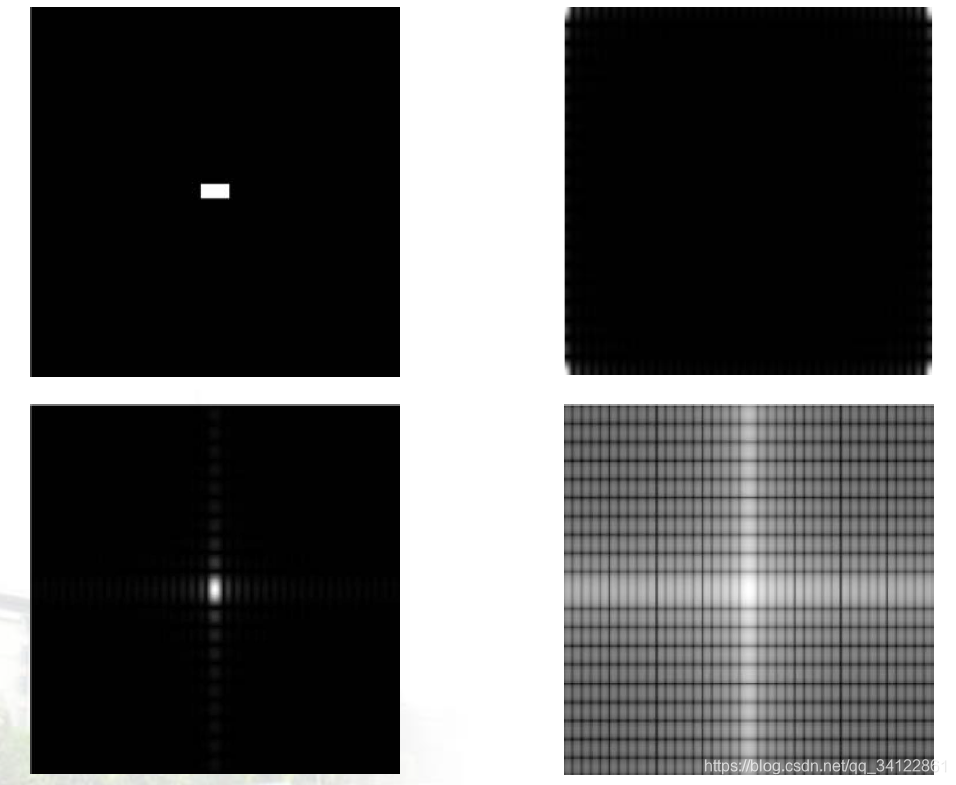
对频谱的进一步理解——频谱移频
通过旁听,我新的理解为:
如上图所示,对图像频率域滤波后,四个角落为低频分量。通过中心变换,低频分量被移动到图像中心。
f(x,y)在空间与一个指数项相乘相当于平移其傅里叶变换。
也多少明白了点参考链接3的这段话:
从频谱图上可以看出,当将频谱移频到原点以后,图像中心比较亮。在频谱图中,一个点的亮暗主要与包含这个频率的数目有关,也就是说在空间域中包含这种频率的点越多,频谱图中对应的频率的位置越亮。而经过频移后,频率为0的部分,也就是傅里叶变换所得到的常量分量在图像中心,由内往外扩散,点所代表的频率越来越高。可以从上面的结果中看出,只取核心的小范围内的低频信号再将其转换回到时域空间,已经能够在一定程度是看到图像的基本轮廓信息,这说明了图像中的“能量”主要集中在低频部分。
4.3 数学形态学
第5章 图像分割技术
图像分割是在图像特征提取之前的工作,其分割结果的好坏直接影响图像分析的结果。
5.1 阈值化处理
-
全局阈值的确定
极小点阈值法
迭代阈值法
最小误差阈值选取法
Otsu 阈值法 -
可变阈值
图像分块
基于局部图像特性的可变阈值处理
5.2 基于区域的分割
四叉树方法思想
5.3 分水岭分割
见我写的某篇博客链接4的 第4章 深度估计与分割(SGBM、GrabCut、分水岭) 个人笔记 分水岭部分。
5.4 彩色图像分割
自学内容
第6章 边缘检测技术
6.1 边缘提取
梯度算子、方向算子、拉普拉斯算子、LOG 算子、Canny 算子
6.2 形状检测
边界追踪、边界提取、区域描述
6.3 几何检测
几何基元:直线、线段、圆、椭圆 、双曲线、抛物线等
方法:Hough变换方法

对Hough变换的进一步理解——坐标系转换
将原先的曲线变成ρ-θ坐标系中的一点。遍历原先曲线上的所有点,得到ρ-θ坐标系中对应的点。通过对ρ-θ坐标系对应的点进行可信度处理,得到对应的(ρ,θ)。
6.4 孤立点检测
拉普拉斯算子
结语
这门课本周五即将结课,由于是旁听,也没有做过实验。
看过实验报告,觉得还是无从下手。实践与理论的差距,真的是天上地下。
第7章 单、双目视觉测量 涉及到标定及坐标系转换,没有听懂
第8章 目标检测 因为听别的报告,并没有去听
第9章 模式识别 部分推导较为繁琐,我比较抵触
所以,最后三章的笔记就不列出了,日后若有机会遇到,再单独另写。
愿自己能坚持住旁听的习惯。
个人水平有限,有问题欢迎各位大神批评指正!
参考链接
- 点、线和边缘检测 个人笔记(含Sobel和Laplace等算子、Marr-Hildreth和Canny实现及Hough变换)
https://blog.csdn.net/qq_34122861/article/details/98471291 - 卷积神经网络CNN(1)——图像卷积与反卷积(后卷积,转置卷积)
https://blog.csdn.net/Fate_fjh/article/details/52882134 - 【图像处理】数字图像傅里叶变换的物理意义及简单应用
https://blog.csdn.net/u013921430/article/details/79934162 - 第4章 深度估计与分割(SGBM、GrabCut、分水岭) 个人笔记
https://blog.csdn.net/qq_34122861/article/details/98721969
