1. Canny算法介绍
- Canny是边缘检测算法,在1986年提出的。
- 是一个很好的边缘检测器
- 很常用也很实用的图像处理方法
1.1 Canny算法包括
- 高斯模糊
- 灰度转换
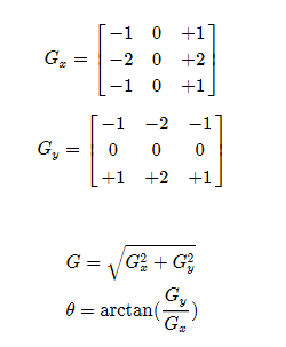
- 计算梯度
- 非最大信号抑制
- 高低阈值输出二值图像
1.1.1 非最大信号抑制

1.1.2 高低阈值输出二值图像
- T1, T2为阈值,凡是高于T2的都保留,凡是小于T1都丢弃,从高于T2的像素出发,凡是大于T1而且相互连接的,都保留。最终得到一个输出二值图像。
- 推荐的高低阈值比值为 T2: T1 = 3:1/2:1其中T2为高阈值,T1为低阈值
2. cv::Canny() API
Canny(
InputArray src, // 8-bit的输入图像
OutputArray edges,// 输出边缘图像, 一般都是二值图像,背景是黑色
double threshold1,// 低阈值,常取高阈值的1/2或者1/3
double threshold2,// 高阈值, 设为threshold1*2即可
int aptertureSize,// Soble算子的size,通常3x3,取值3
bool L2gradient // 选择 true表示是L2来归一化(即使用准确公式计算,效率较低),否则用L1归一化(即使用近似公式计算,效率较高)
)
其中关于最后一个参数:


默认情况一般选择是L1,参数设置为false。

3. 例程
#include<opencv2/opencv.hpp>
#include<iostream>
using namespace cv;
Mat src, dst;
int threshold1 = 50;
void Canny_Demo(int, void*);
Mat blur_image;
int main() {
src = imread("D:/resource/images/face.jpg");
if (!src.data) {
printf("the image couldn't be loaded...");
return -1;
}
imshow("input image", src);
namedWindow("output image");
GaussianBlur(src, blur_image, Size(3,3),0);
createTrackbar("threshold1", "output image", &threshold1, 255, Canny_Demo);
Canny_Demo(0, 0);
waitKey(0);
return 1;
}
void Canny_Demo(int, void*) {
Canny(blur_image, dst, threshold1, threshold1 * 2);
imshow("output image", dst);
}
