无人驾驶技术主要技术
1.激光雷达。当被装置到车顶时就会不停的向四周去发射激光束,从而知道周边是什么状况。
2.By-wire system,也就是摆外线控。车是被电脑所控制的。在传统汽车中,方向盘和车轮是通过一系列的齿轮向连接的,那么这样电脑是无法来控制车轮的。而by-wire system中可能方向盘和电机是通过一层电机来连接,方向盘传动到电机上,而通过电机来控制车轮实现转向。这样的话电脑就可以通过控制电机或者控制电流来实现转向的控制。其中,方向盘是给人类来使用的。
3.无人驾驶车辆在路上驾驶,会产生大量的数据。所以就需要处理能力很强的处理器来处理这这些数据。
4.要跟云端相联系,告诉云端车在哪。云端来控制车辆。
需要
1.高精地图,高精地图起码是需要到车道级别的。还需要交通路口,减速带等。可以给无人车很多的预判空间,同时减少无人车的计算量。
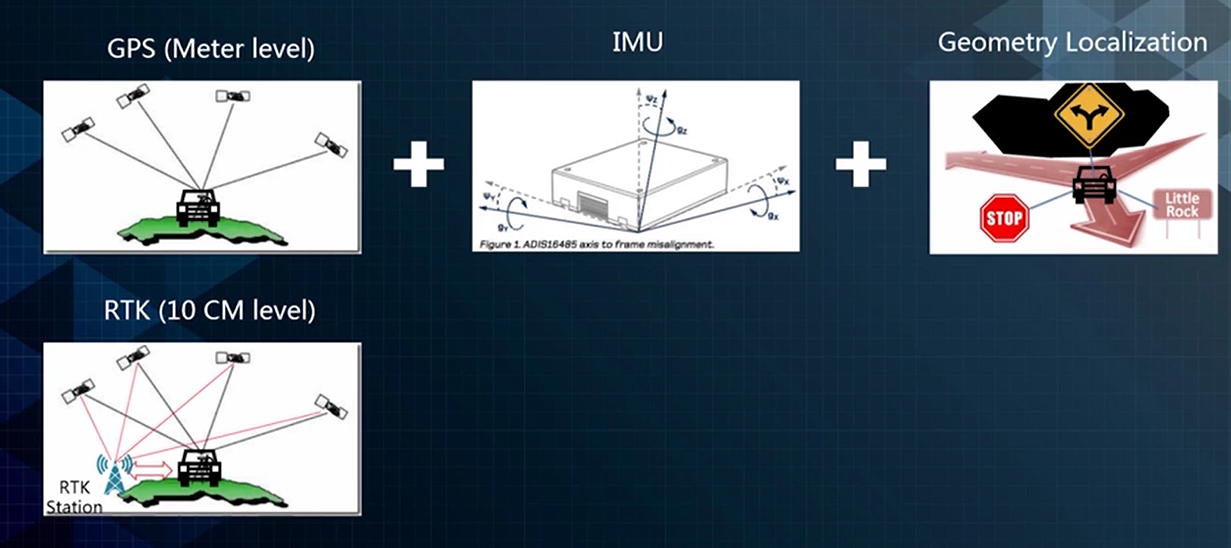
2.定位技术。
在无人驾驶中,车需要知道自己在地图的具体哪个位置。
其实卫星定位都是采用相对定位的方法来实现的。卫星会不断地发射电磁波,当接收器接收到电磁波的信号后就会计算距离卫星的距离,当采集到距离几个卫星的距离之后就可以通过方程来解出位置坐标。而GPS的计算取决于光速和我们接收到信号的时间。但是电磁波在传播过程中信号强度会衰减,并且可能会遇到物体而反射造成误差。所以GPS是有误差的,它的误差是米级的。而对于无人驾驶的车来说,则需要更加精密的定位技术。所以在GPS的基础上又发明了RTK的技术。我们所那的手机,包括车载导航上的定位模块可以称之为移动站,而RTK就是一座静止站,也就是所说的基站。RTK也可以接收到卫星的信号。如果车和RTK基站相隔不太远的话,我们就可以认为RTK和车接收到的信号的衰减和变化是一致的。如果在两者之间做一个差分,那么产生的一些干扰信号就可以在一定程度上被磨平。所以RTK这个技术可以使GPS的定位精度达到10cm左右。这个RTK基站要求车距离基站不能太远,在16公里之内。同时GPS除了精度不够之外还有一个缺点就是计算出来的结果是跳动的,GPS是时时计算距离来通过解方程来进行定位的,并且不会通过历史信息来推断下个位置,而定位信号可能受到反射信号、云层等的影响,所以计算出来的定位信息可能是跳动的。但同时,物理的东西是无法瞬间移动的,我们可以通过imu来把GPS计算出来的跳变磨平。但是imu是用过计算来实现的,所以可能会有计算上的误差。所以GPS和IMU一般是一块来使用的,GPS不停的给IMU一个方向去校准,然后IMU再给GPS一个方向,两者是相互校准的。这也就是所说的卡尔曼滤波。同时,在一些地方是没有GPS信号的,比如隧道,城市中的谷地等,而在这些地方就采用几何定位。通过在周围环境中挑选一些feature,来实现定位。所谓定位就是以上定位技术的融合。但是也有一些以上技术都无法实现定位的地方,比如刚才说到的隧道,就是一条单纯的长直的隧道,无法提取任何feature来实现定位。那么以上的所有定位技术都会失效。但是在隧道中我们可以提取出隧道壁的距离从而实现横向的定位,而通过传感器等实现与前车的定位等。

How does the world look like in the eyes of the Autonomous Vehicle
lider技术是不停的向四周发射激光,也就是说lider是无数的激光点,当激光点照射到物体身上后就会反射回来并通过接收器接收到。通过时间和激光的速度可以计算出每个点的反射物体的距离。所以lider对于距离的判断非常精准。缺点是对于环境的要求很高,lider发射出去的是激光束,激光束是属于纳米级的光波,而波其实是可以绕过一些障碍物的,这些是跟波长相关的。因为是纳米级别的光波,可能会受到很小的颗粒物就会被视为是障碍物。比如车在一片浓雾中可能就会将周围的雾霾视为墙体。lider无法观看出颜色。并且lider的价格很高。
所有的sensor都是有局限性的,我们要把所有传感器的信息融合在一起。最起码的实现时间和空间的同步。从而障碍物是什么。
首先将不同传感器接收到的信号进行融合,以实现不同传感器信号在空间和时间上的同步,将出现在不同传感器内的同一个物体的信号进行同步和融合,大体确定是此物体是什么。其次将这个障碍物用框框起来,接下来采集和分析它运动的方向、轨迹和速度。要有办法去预测。
接下来就是决策,比如是否要避让,停止礼让。
云计算
在百度后台会有巨大的仿真空间,会在这些仿真空间中模拟无数的场景。车辆在行驶的时候可能会遇到一些很值得借鉴的场景,云计算就会把这些场景存储到云数据库中。然后在数据库中将这些场景还原并进行算法上的解决。当更新算法之后,下次遇到这样的场景就可以解决。从而达到不光看到这条路,还要理解这条路。