世界坐标系、相机坐标系、图像坐标系、像素坐标系之间的转换公式参考:世界坐标系、相机坐标系、图像坐标系、像素坐标系之间的转换
其中图像坐标到世界坐标的转化公式作者讲解的也比较清楚,但是对于Zc的值,作者并没有给出进一步讲解
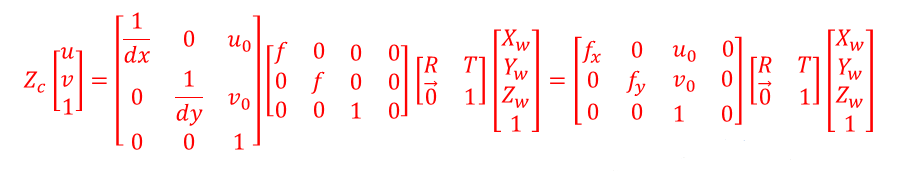
自己项目中有涉及到图像坐标到世界坐标的转化,故这里想写出来供大家参考,如有理解有误,欢迎指正。这里的前提是世界坐标的原点在地面上。
上述公式可以简写为:
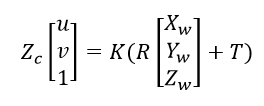
进一步:

其中 R,K,T均为已知值。将上述等式中的变量做以下改写,方便描述:
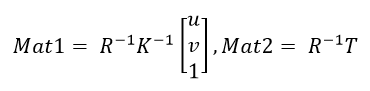
只观察世界坐标计算公式中等式两边的第三项,则:


其中,Mat2(2,0)表示3×1矩阵的第三项。如果像素点在地面则Zw=0;如果像素点有一定高度,则Zw=实际物体高度,求出Zc后即可根据像素坐标求得世界坐标。
