Min/Max Edge Detection
Min/Max 边缘检测算法的主要思路:
- 图像去噪。本文算法中所使用的是中值滤波算法进行图像去噪处理
- 计算邻域内最大最小值。图像去噪之后,计算邻域内最大最小值
- 把最大最小值之差赋值给当前模板的中心像素
中值滤波算法主要代码为:
#include"Sharp.h"
int Sort(T_U8 *bArray,int size)
{
int i;
int j,k;
int bTemp;
// 用冒泡法对数组进行排序
for (j = 0; j < size; j ++)
{
for (i = 0; i < size- j; i ++)
{
if (bArray[i] > bArray[i + 1])
{
// 互换
bTemp = bArray[i];
bArray[i] = bArray[i + 1];
bArray[i + 1] = bTemp;
}
}
}
}
T_U8 MedianFilter(T_U8 *src_img,DWORD width,DWORD height,T_U8 filterSize)
{
int i,j,m,n,k,medianIndex,neighbourCount,filteroffset,index,neighbour,medianFilterPos;
T_U8 *medianFilterResult,*Neighbours,*dst;
T_U32 Gray_line_byte = (width*8/8+3)/4*4;
neighbourCount = filterSize*filterSize;
medianIndex = neighbourCount/2;
filteroffset = (filterSize-1)/2;
Neighbours = (T_U8*)malloc(neighbourCount);
if(Neighbours == NULL)
{
printf("can't malloc\r\n" );
return 0;
}
memset(Neighbours,0,neighbourCount);
dst = src_img + 54 + 256*sizeof(RGBQUAD);
for(i = filteroffset;i < height-filteroffset;i++)
{
for(j = filteroffset;j < width-filteroffset;j++)
{
index = i*Gray_line_byte+j;
for(m = -filteroffset,neighbour = 0;m <= filteroffset;m++)
{
for(n = -filteroffset;n <= filteroffset;n++,neighbour++)
{
medianFilterPos = index+m*Gray_line_byte+n;
Neighbours[neighbour] = dst[medianFilterPos];
}
}
Sort(Neighbours,neighbourCount);
dst[index] = Neighbours[medianIndex];
}
}
return 0;
}最大最小值边缘检测算法代码如下:
#include"Sharp.h"
T_U8* MinMaxEdgeDetection(T_U8 *src_img,DWORD width,DWORD height,T_U8 filterSize)
{
int i,j,m,n,k,medianIndex,neighbourCount,filteroffset,index,neighbour,medianFilterPos,MinPix = 0,MaxPix = 0;
T_U8 *MinMaxEdgeDecter,*Neighbours,*dst;
T_U32 Gray_line_byte = (width*8/8+3)/4*4;
neighbourCount = filterSize*filterSize;
medianIndex = neighbourCount/2;
filteroffset = (filterSize-1)/2;
MinMaxEdgeDecter = (T_U8*)malloc(height*Gray_line_byte);
Neighbours = (T_U8*)malloc(neighbourCount);
if(Neighbours == NULL)
{
printf("can't malloc\r\n" );
return 0;
}
memset(Neighbours,0,neighbourCount);
memset(MinMaxEdgeDecter,0,height*Gray_line_byte);
dst = src_img + 54 + 256*sizeof(RGBQUAD);
for(i = filteroffset;i < height-filteroffset;i++)
{
for(j = filteroffset;j < width-filteroffset;j++)
{
index = i*Gray_line_byte+j;
MinPix = 99999;
MaxPix = -99999;
for(m = -filteroffset,neighbour = 0;m <= filteroffset;m++)
{
for(n = -filteroffset;n <= filteroffset;n++,neighbour++)
{
medianFilterPos = index+m*Gray_line_byte+n;
Neighbours[neighbour] = dst[medianFilterPos];
}
}
Sort(Neighbours,neighbourCount);
MinPix = Neighbours[0];
MaxPix = Neighbours[neighbourCount-1];
MinMaxEdgeDecter[index] = CLIP255((int)((MaxPix-MinPix)));
}
}
return MinMaxEdgeDecter;
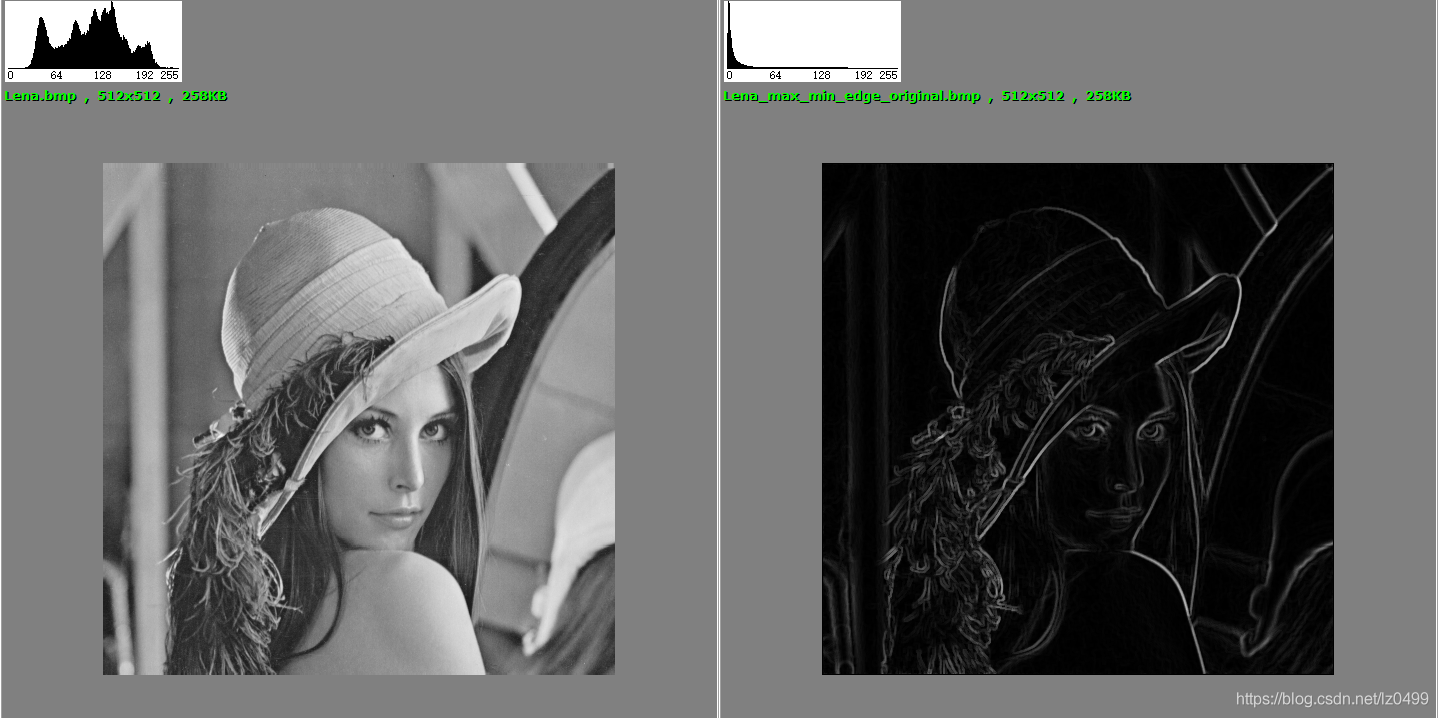
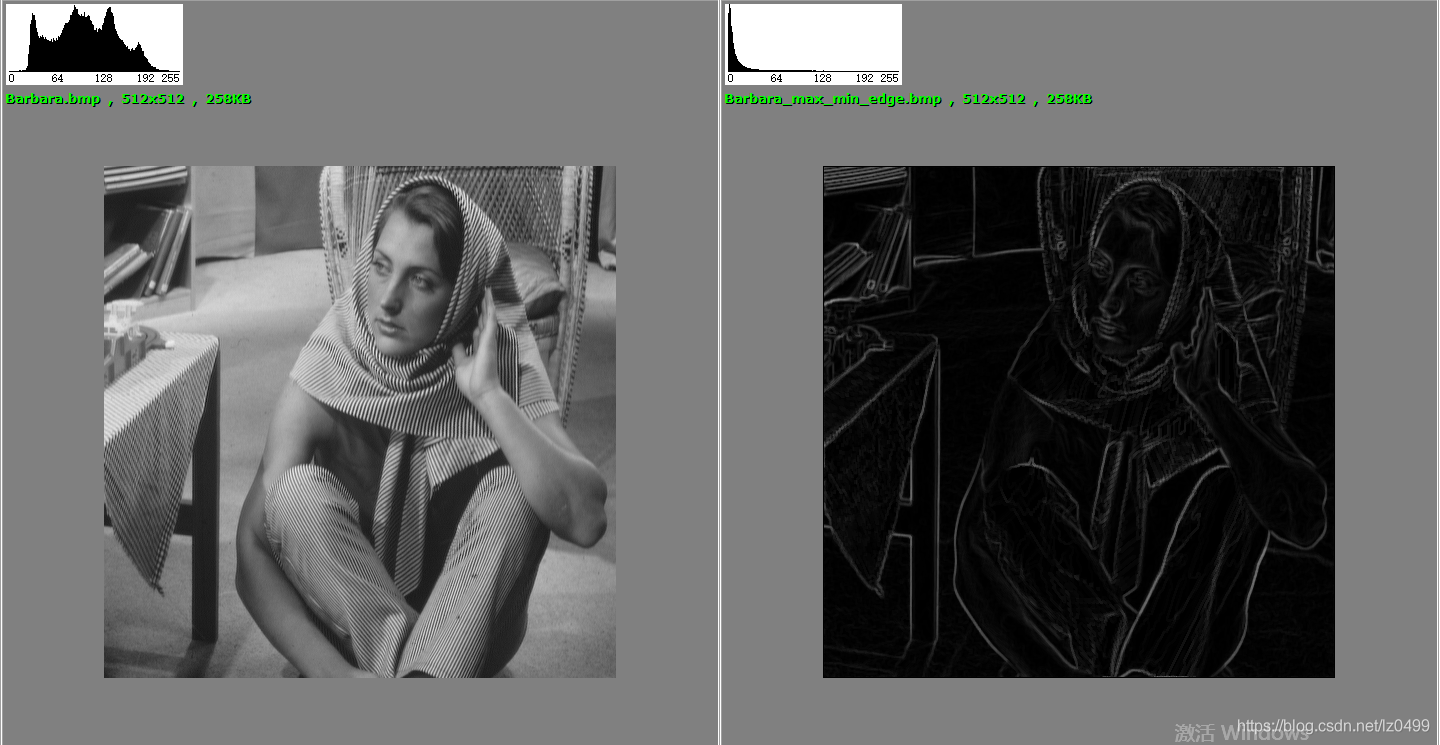
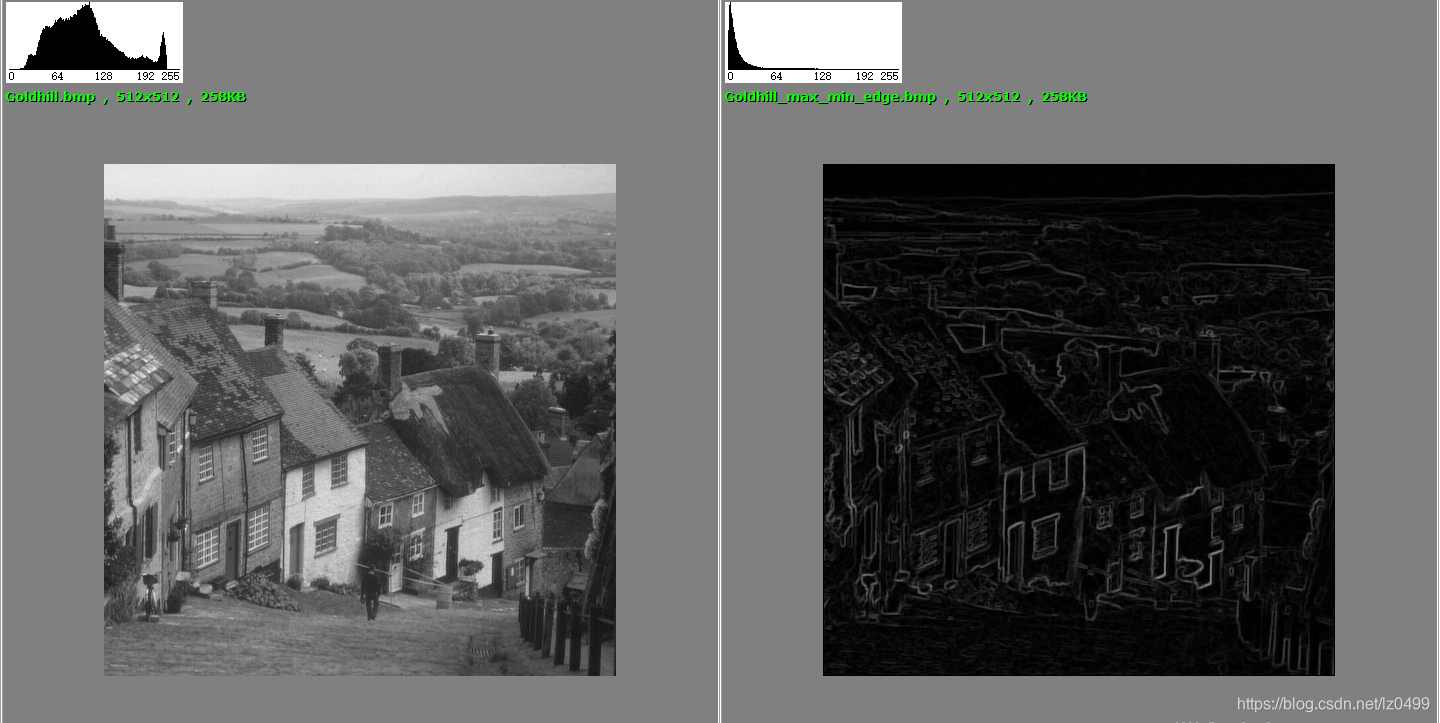
}最大最小值边缘检测结果为: