本文主要以一个带权有向图为例,讲解图相关的一些算法实现(Go语言),包括图的顶点和边的插入与删除操作,还有图的深度优先遍历和广度优先遍历,以及图的一些引申应用:最小生成树、从源点到其余各点的最短路径、拓扑排序。
一、图的概念
图是由顶点集合及顶点间的关系(边)集合组成的一种数据结构。
关于图的更多基本术语的概念可以参考:https://www.jianshu.com/p/d9ca383e2bd8
二、图的存储表示
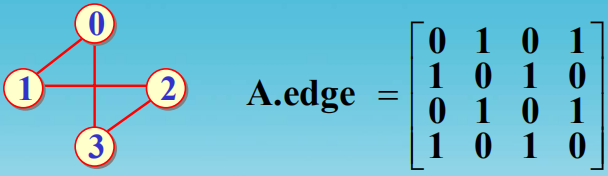
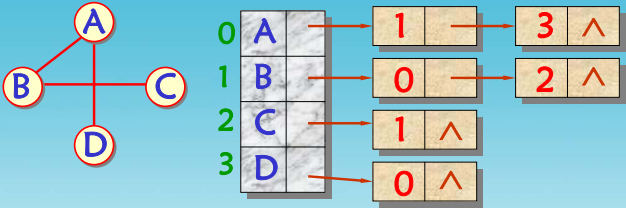
图的存储表示形式有两种:邻接矩阵、邻接表,下面分别是这两种存储表示形式的示例。
一个无向图的邻接矩阵表示示例如下:
一个无向图的邻接表表示示例如下:
本文主要以一个带权有向图为例,使用邻接表进行存储表示,代码实现如下:
/**
* 带权有向图顶点数组节点结构
**/
type VertexArrayNode struct {
data byte //顶点数据
link *EdgeListNode //出边链表
}
/**
* 带权有向图出边链表节点结构
**/
type EdgeListNode struct {
vertexArrayIndex int //顶点数组索引
weight int //权重值
next *EdgeListNode //下一个指向节点
}
/**
* 带权有向图结构
**/
type ListGraph struct {
slice []*VertexArrayNode //顶点数组
size int //顶点数量
}
/**
* 创建空带权有向图
**/
func NewListGraph() *ListGraph {
return &ListGraph{
slice: make([]*VertexArrayNode, 10),
size: 0,
}
}
/**
* 打印
**/
func (lg *ListGraph) Print() {
for i := 0; i < lg.size; i++ {
fmt.Print(string(lg.slice[i].data), ": (")
ptr := lg.slice[i].link
for ptr != nil {
fmt.Print("index:", ptr.vertexArrayIndex, ",weight:", ptr.weight, " ")
ptr = ptr.next
}
fmt.Println(")")
}
}
三、图的顶点和边的插入与删除
/**
* 插入顶点
**/
func (lg *ListGraph) InsertVertex(data byte) error {
if lg.VertexIndex(data) != -1 {
return errors.New("节点已存在")
}
vertex := &VertexArrayNode{data: data}
lg.size++
if lg.size <= len(lg.slice) {
lg.slice[lg.size-1] = vertex
} else {
lg.slice = append(lg.slice, vertex)
}
return nil
}
/**
* 删除顶点
**/
func (lg *ListGraph) RemoveVertex(data byte) error {
index := lg.VertexIndex(data)
if index == -1 {
return errors.New("节点不存在")
}
for i := index + 1; i < lg.size; i++ {
lg.slice[i-1] = lg.slice[i]
}
lg.size--
return nil
}
/**
* 插入边
**/
func (lg *ListGraph) InsertEdge(from byte, to byte, weight int) error {
fromIndex := lg.VertexIndex(from)
toIndex := lg.VertexIndex(to)
if fromIndex == -1 || toIndex == -1 {
return errors.New("边节点不存在")
}
ptr := lg.slice[fromIndex].link
for ptr != nil {
if ptr.vertexArrayIndex == toIndex {
return errors.New("边已存在")
}
ptr = ptr.next
}
elNode := &EdgeListNode{
vertexArrayIndex: toIndex,
weight: weight,
next: lg.slice[fromIndex].link,
}
lg.slice[fromIndex].link = elNode
return nil
}
/**
* 删除边
**/
func (lg *ListGraph) RemoveEdge(from byte, to byte) error {
fromIndex := lg.VertexIndex(from)
toIndex := lg.VertexIndex(to)
if fromIndex == -1 || toIndex == -1 {
return errors.New("边节点不存在")
}
ptr := lg.slice[fromIndex].link
parent := lg.slice[fromIndex].link
for ptr != nil {
if ptr.vertexArrayIndex == toIndex {
if parent == ptr {
lg.slice[fromIndex].link = ptr.next
} else {
parent.next = ptr.next
}
}
parent = ptr
ptr = ptr.next
}
return errors.New("边不存在")
}
/**
* 返回某个节点的索引
**/
func (lg *ListGraph) VertexIndex(data byte) int {
for i := 0; i < lg.size; i++ {
if lg.slice[i].data == data {
return i
}
}
return -1
}
四、图的遍历
1. 深度优先遍历
算法描述:
(1)在访问图中某一起始顶点V后,由V出发,访问它的任一邻接顶点W1;再从W1出发,访问与W1邻接但还没有访问过的顶点W2;然后再从W2出发,进行类似的访问操作,一直执行下去,直到到达所有邻接顶点都已被访问过的顶点U为止。
(2)接着,往回退一步,退到前一次刚访问过的顶点,看看是否还有其它没有被访问过的邻接顶点。如果有,则访问此顶点,然后以此顶点为起始顶点进行(1)操作;如果没有,就再往回退一步进行搜索。
(3)重复(1)和(2),直到连通图中所有顶点都被访问过为止。
此过程为递归过程。
代码实现:
/**
* 深度优先遍历
**/
func (lg *ListGraph) Dfs(start byte) {
index := lg.VertexIndex(start)
if index == -1 {
fmt.Println("节点不存在:", string(start))
}
visited := make([]int, lg.size) //访问标记
lg._dfs(index, visited)
fmt.Println()
}
/**
* 深度优先遍历(递归,Dfs方法调用)
**/
func (lg *ListGraph) _dfs(startIndex int, visited []int) {
if visited[startIndex] == 1 { //避免重复访问
return
}
fmt.Print(string(lg.slice[startIndex].data), " ")
visited[startIndex] = 1
ptr := lg.slice[startIndex].link
for ptr != nil {
lg._dfs(ptr.vertexArrayIndex, visited)
ptr = ptr.next
}
}
2. 广度优先遍历
算法描述:
在访问了起始顶点V之后,由V出发,依次访问V的各个未被访问过的邻接顶点W1,W2,...,然后再顺序访问W1,W2,...的所有还未被访问过的邻接顶点。再从这些访问过的顶点出发,访问它们的所有还未被访问过的邻接顶点,...一直执行,直到图中所有顶点都被访问过为止。
此过程是一种分层的搜索过程,不是递归过程,每向前走一步可能访问多个顶点,所以需要使用一个队列来存放依次访问的顶点。
代码实现:
/**
* 广度优先遍历
**/
func (lg *ListGraph) Bfs(start byte) {
index := lg.VertexIndex(start)
if index == -1 {
fmt.Println("节点不存在:", string(start))
}
visited := make([]int, lg.size) //访问标记
lq := listQueue.NewListQueue() //链表队列
lq.Push(index)
for !lq.IsEmpty() {
index, _ := lq.Pop()
if visited[index] == 1 { //已经访问过
continue
}
fmt.Print(string(lg.slice[index].data), " ")
visited[index] = 1
ptr := lg.slice[index].link
for ptr != nil {
lq.Push(ptr.vertexArrayIndex)
ptr = ptr.next
}
}
fmt.Println()
}
上面代码中使用的链表队列在我的另一篇博文有讲解:https://www.cnblogs.com/wujuntian/p/12263763.html,这里直接使用这个包。
五、最小生成树
在有n个顶点的带权值的网结构图中,选取n-1条边,使得将图中所有顶点连接起来的权值和最低。把构造连通网的最小代价生成树称为最小生成树。最小生成树的实现有两种经典算法。
1. 普里姆算法
基本思想:
从顶点入手找边
算法描述:
(1)将所有顶点分组,出发点为第一组,其余所有节点为第二组。
(2)在一端属于第一组,另一端属于第二组的边中选择一条权值最小的。
(3)把这条边中原属于第二组的节点放入第一组中。
(4)重复(2)和(3),直到第二组节点为空为止。
代码实现:
/**
* 最小生成树(普里姆算法)
**/
func (lg *ListGraph) MinSpanTree_Prim(start byte) {
index := lg.VertexIndex(start)
if index == -1 {
fmt.Println("节点不存在:", string(start))
}
visited := make([]int, lg.size) //访问标记
visited[index] = 1
count := 0 //已找到的边数
var minIndex int
var minFrom, minTo byte
type fromTo struct {
from byte
to byte
weight int
}
edges := make([]fromTo, lg.size-1) //最小生成树的所有边
for count < lg.size-1 { //需要找到lg.size-1条边
minWeight := 32767
for i := 0; i < lg.size; i++ { //从已访问过的节点找到通向未访问过的节点的最小权值路径
if visited[i] == 0 {
continue
}
ptr := lg.slice[i].link
for ptr != nil {
if visited[ptr.vertexArrayIndex] == 0 && ptr.weight < minWeight {
minWeight = ptr.weight
minIndex = ptr.vertexArrayIndex
minFrom = lg.slice[i].data
minTo = lg.slice[ptr.vertexArrayIndex].data
}
ptr = ptr.next
}
}
visited[minIndex] = 1
edges[count] = fromTo{
from: minFrom,
to: minTo,
weight: minWeight,
}
count++
}
sumWeight := 0
fmt.Println("最小生成树所有边:")
for i := 0; i < count; i++ {
fmt.Println("from:", string(edges[i].from), ", to:", string(edges[i].to), ", weight:", edges[i].weight)
sumWeight += edges[i].weight
}
fmt.Println("最小生成树路径权值和:", sumWeight)
}
2. 克鲁斯卡尔算法
基本思想:
从边入手找顶点
算法描述:
(1)先构造一个只有n个顶点的子图SG。
(2)然后从权值最小的边开始,若它的加入不使SG中产生回路,则在SG上加上这条边。
(3)反复执行第二步,直至加上n-1条边为止。
六、从源点到其余各点的最短路径
1. 问题描述
给定一个带权有向图D与源点V,求从V到D中其它顶点的最短路径。
2. 算法描述
(1)将从V到其所有邻接顶点的边的权值作为从V到其所有邻接节点的路径值,不邻接的顶点的路径值暂时初始化为正无穷大。
(2)从(1)中得到的所有路径值中选取一个最小值min,设其对应的顶点为W,则V到W的最短路径已确定。
(3)从W出发,遍历其邻接的顶点W1,W2,...,若min+W到W1的边的权值<V到W1路径值,则更新V到W1的路径值为min+W到W1的边的权值。
(4)重复(2)和(3),直至V到其它所有顶点的最短路径都已确定。
3. 代码实现
/**
* 从源点到其余各点的最短路径
**/
func (lg *ListGraph) ShortestPath(start byte) {
index := lg.VertexIndex(start)
if index == -1 {
fmt.Println("节点不存在:", string(start))
}
weights := make([]int, lg.size) //源点到其余各点的路径长度
//初始化
for i := 0; i < lg.size; i++ {
weights[i] = 32767
}
weights[index] = 0
ptr := lg.slice[index].link
for ptr != nil {
weights[ptr.vertexArrayIndex] = ptr.weight
ptr = ptr.next
}
visited := make([]int, lg.size) //已确定最短路径的节点
visited[index] = 1
count := 1
var minIndex int
for count < lg.size { //需要确定lg.size个节点的最短路径
minWeight := 32767
for i := 0; i < lg.size; i++ { //找出源点通向节点的最短路径
if weights[i] < minWeight && visited[i] == 0 {
minWeight = weights[i]
minIndex = i
}
}
visited[minIndex] = 1 //确定节点最短路径
count++
ptr = lg.slice[minIndex].link
for ptr != nil { //以此最短路径节点为起点,更新其可以到达的各个节点的最短路径
if minWeight+ptr.weight < weights[ptr.vertexArrayIndex] && visited[ptr.vertexArrayIndex] == 0 {
weights[ptr.vertexArrayIndex] = minWeight + ptr.weight
}
ptr = ptr.next
}
}
for i := 0; i < lg.size; i++ {
fmt.Println(string(lg.slice[i].data), ": ", weights[i])
}
}
七、拓扑排序
1. 问题描述
需要完成多个任务,而任务与任务之间存在一定依赖关系,被依赖的任务需要先完成才能执行其它任务,求输出这些任务的一种符合要求的完成顺序。
2. 算法描述
(1)将这些任务作为顶点,任务之间的依赖关系作为有向边,被依赖者指向依赖者,构建一个有向图。
(2)遍历有向图的所有顶点,计算所有顶点的入度,并将入度为0的顶点入栈(这里也可以使用队列)。
(3)出栈一个入度为0的顶点,输出之。
(4)遍历这个顶点的所有邻接顶点,将其邻接顶点的入度都减1,若入度已减为0,则将顶点入栈。
(5)重复(3)和(4),直到出现以下情况之一:
全部顶点都已输出,则拓扑排序完成。
图中还有未输出的顶点,但已没有入度为0的节点,说明有向图中存在环,拓扑排序无法完成。
3. 代码实现
/**
* 拓扑排序
**/
func (lg *ListGraph) Topological() {
pene := make([]int, lg.size) //各个节点的入度
for i := 0; i < lg.size; i++ { //各个节点的入度初始化
ptr := lg.slice[i].link
for ptr != nil {
pene[ptr.vertexArrayIndex]++
ptr = ptr.next
}
}
as := arrayStack.NewArrayStack() //数组栈
for i := 0; i < lg.size; i++ { //入度为0的节点索引入栈
if pene[i] == 0 {
as.Push(i)
}
}
var topoData []byte //拓扑排序序列
for !as.IsEmpty() {
index, _ := as.Pop()
topoData = append(topoData, lg.slice[index].data)
ptr := lg.slice[index].link
for ptr != nil { //更新所有到达节点的入度
index = ptr.vertexArrayIndex
pene[index]--
if pene[index] == 0 {
as.Push(index)
}
ptr = ptr.next
}
}
if len(topoData) < lg.size {
fmt.Println("有向图中存在回路,拓扑排序失败")
} else {
for i := 0; i < lg.size; i++ {
fmt.Print(string(topoData[i]), " ")
}
}
}
上面代码中使用的数组栈在我的另一篇博文有讲解:https://www.cnblogs.com/wujuntian/p/12263652.html,这里直接使用这个包。