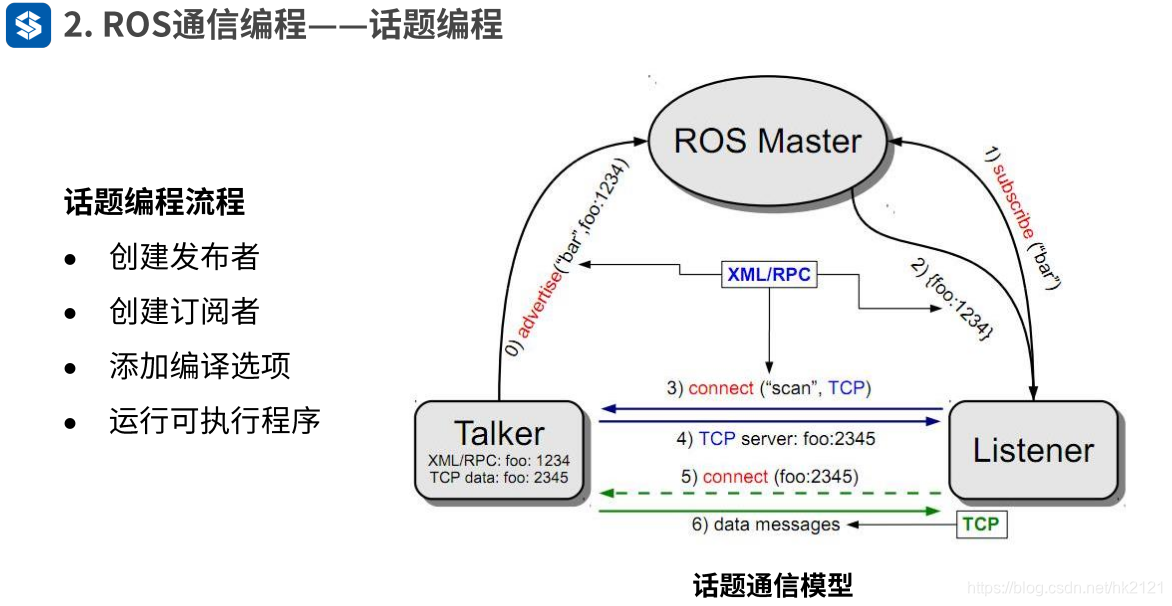
ROS Publisher c++ 与 Python 实现
C++
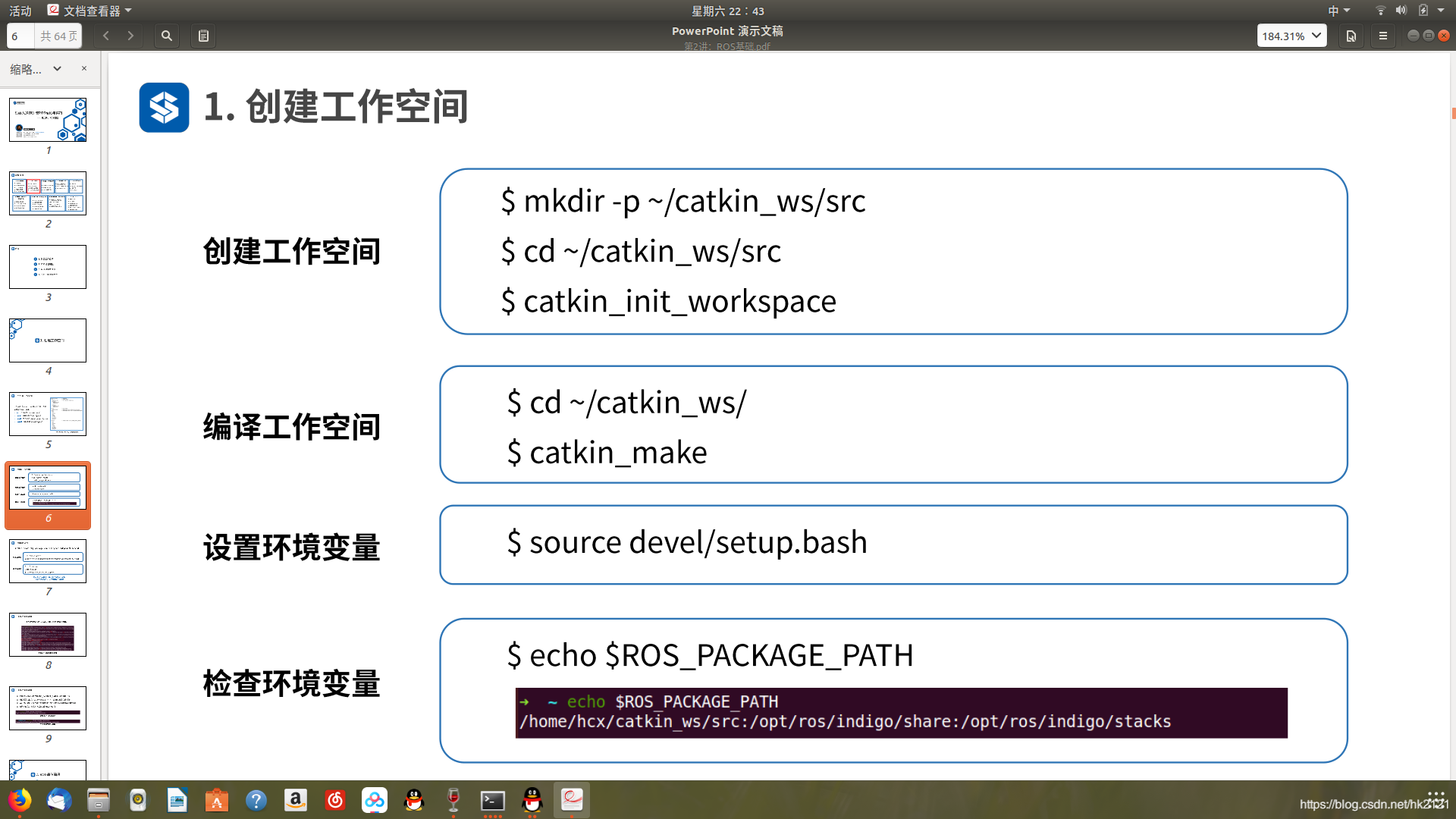
创建完工作空间后
 功能包根据需要什么创建(rospy geometry_msgs )
功能包根据需要什么创建(rospy geometry_msgs )
把C++文件放到src
catkin_make
改
创建包/src/包名/Cmakelist.txt
add_executable(velocity_publisher src/velocity_publisher.cpp)//文件velocity_publisher 为rosrun 后的指令
target_link_libraries(velocity_publisher ${catkin_LIBRARIES})//依赖
#######
#install#
#######
回到catkin_ws catkin_make
最后 source devel/setup.bash
运行 rosrun 包名 velocity_publisher(cpp名)
Python
在源文件(catkin_ws)内创建scripts,把 .py 文件放到里面
直接在终端里打开scripts 运行 python --.py(py文件)
