目录:
1、构建公用数据集如MNIST数据集
2、构建自己的数据集
3、读取或者保存模型,进行断点续训练
4、构建网络结构
5、进行训练
6、图形化展示训练结果
1、构建公用数据集如MNIST数据集
def load_dataset(batch_size=10, download=True):
"""
The output of torchvision datasets are PILImage images of range [0, 1].
Transform them to Tensors of normalized range [-1, 1]
"""
transform = transforms.Compose([transforms.ToTensor(),
transforms.Normalize([0.5], [0.5])])
#二维和三维数据的transforms.Normalize()有区别
trainset = torchvision.datasets.MNIST(root='../data', train=True,
download=download,
transform=transform)
trainloader = torch.utils.data.DataLoader(trainset, batch_size=batch_size,
shuffle=True)
testset = torchvision.datasets.MNIST(root='../data', train=False,
download=download,
transform=transform)
testloader = torch.utils.data.DataLoader(testset, batch_size=batch_size,
shuffle=False)
return trainloader, testloader
2、构建自己的数据集
在大多数的实际训练和项目进行中,都是需要根据自己的数据制作数据集进行训练的,使用pytorch制作自己的数据集。
在构建pytorch类型的数据集时,我们有图片、 标签txt文件两种,任务就是使用图片、标签txt文件制作torch.dataset格式数据集:
前提知识:
python的运算符重载:https://blog.csdn.net/zhangshuaijun123/article/details/82149056
1、数据集的制作
import torch
from torch.utils.data import Dataset
from PIL import Image
#以torch.utils.data.Dataset为基类创建MyDataset
class MyDataset(Dataset):
#stpe1:初始化
def __init__(self, txt, transform=None, target_transform=None,):
fh = open(txt, 'r')#打开标签文件
imgs = []#创建列表,装东西
for line in fh:#遍历标签文件每行
line = line.rstrip()#删除字符串末尾的空格
words = line.split()#通过空格分割字符串,变成列表
imgs.append((words[0],int(words[1])))#把图片名words[0],标签int(words[1])放到imgs里
self.imgs = imgs
self.transform = transform
self.target_transform = target_transform
def __getitem__(self, index):#检索函数,相当于[]的符号重载
fn, label = self.imgs[index]#读取文件名、标签
img = Image.open(fn).convert('RGB')#通过PIL.Image读取图片
if self.transform is not None:
img = self.transform(img)
return img,label
def __len__(self):#相当于重载len()
return len(self.imgs)
2、数据集的使用
from torchvision import transforms as transforms
trans_form = transforms.Compose([
transforms.Resize(96), # 缩放到 96 * 96 大小
transforms.ToTensor(),
transforms.Normalize((0.5, 0.5, 0.5), (0.5, 0.5, 0.5)) # 归一化
])
train_data=MyDataset(txt='train.txt', transform=trans_form)
test_data=MyDataset(txt='test.txt', transform=trans_form)
train_loader = DataLoader(dataset=train_data, batch_size=64, shuffle=True)
test_loader = DataLoader(dataset=test_data, batch_size=64)
dataloader是一个可迭代的对象,意味着我们可以像使用迭代器一样使用它
迭代器返回的是一个list[imgs,labels]
imgs是64张图片组成的一个tensor
labels是64个标签的tensor
3、划分训练集、验证集合测试集
train_data=MyDataset(txt='train.txt', transform=transforms.ToTensor())
test_data=MyDataset(txt='test.txt', transform=transforms.ToTensor())
print('train:', len(train_data), 'test:', len(test_data))
train_data, val_data = torch.utils.data.random_split(train_data, [55000, 5000])
print('train:', len(train_data), 'validation:', len(val_data))
>>>('train:', 60000, 'test:', 10000)
>>>('train:', 55000, 'validation:', 5000)
代码参考自:
https://blog.csdn.net/weixin_41680653/article/details/93904480
3、读取或者保存模型,进行断点续训练
1、首先是保存模型,主要需要保存epoch、net和optimizer的信息,将其封装在checkpoint中进行保存。
checkpoint = {
'epoch': epoch,
'model_state_dict': net.state_dict(),
'optimizer_state_dict': optimizer.state_dict(),
}
if not os.path.isdir('checkpoint'):
os.mkdir('checkpoint')
torch.save(checkpoint, CHECKPOINT_FILE)
2、读取模型,读取模型进行断点续训练
使用torch.load()恢复checkpoint。
if resume:
# 恢复上次的训练状态
print("Resume from checkpoint...")
checkpoint = torch.load(CHECKPOINT_FILE)
net.load_state_dict(checkpoint['model_state_dict'])
optimizer.load_state_dict(checkpoint['optimizer_state_dict'])
initepoch = checkpoint['epoch']+1
4、构建网络结构
以GAN网络的判别网络为例(可以看做是对图像进行二分类):
在pytorch的框架下,网络都是通过继承nn.Module来进行搭建的。网络的中的参数都被写在该类的属性中。如self.conv1、self.conv2。然后通过forward()进行网络的连接。
import torch.nn as nn
import torch.nn.functional as F
class DCGAN_Discriminator(nn.Module):
def __init__(self, featmap_dim=512, n_channel=1):
#super().__init__()代表继承父类的属性
super(DCGAN_Discriminator, self).__init__()
self.featmap_dim = featmap_dim
self.conv1 = nn.Conv2d(n_channel, featmap_dim // 4, 5,
stride=2, padding=2)
self.conv2 = nn.Conv2d(featmap_dim // 4, featmap_dim //2, 5,
stride=2, padding=2)
self.BN2 = nn.BatchNorm2d(featmap_dim // 2)
self.conv3 = nn.Conv2d(featmap_dim // 2, featmap_dim, 5,
stride=2, padding=2)
self.BN3 = nn.BatchNorm2d(featmap_dim)
self.fc = nn.Linear(featmap_dim * 4 * 4, 1)
def forward(self, x):
"""
Strided convulation layers,
Batch Normalization after convulation but not at input layer,
LeakyReLU activation function with slope 0.2.
"""
x = F.leaky_relu(self.conv1(x), negative_slope=0.2)
x = F.leaky_relu(self.BN2(self.conv2(x)), negative_slope=0.2)
x = F.leaky_relu(self.BN3(self.conv3(x)), negative_slope=0.2)
x = x.view(-1, self.featmap_dim * 4 * 4)
x = F.sigmoid(self.fc(x))
return x
还有一种简单的方法,使用nn.Sequential来构建网络:
# 具体的使用方法
class Net(nn.Module):
def __init__(self):
super(Net, self).__init__()
self.conv_module = nn.Sequential(
nn.Conv2d(1,20,5),
nn.ReLU(),
nn.Conv2d(20,64,5),
nn.ReLU()
)
def forward(self, input):
out = self.conv_module(input)
return out
5、进行训练
网络搭建好之后,进行训练:
D_featmap_dim=512
n_channel=1
Dis_model = DCGAN_Discriminator(featmap_dim=D_featmap_dim,
n_channel=n_channel)
if use_gpu:
Dis_model = Dis_model.cuda()
# assign loss function and optimizer (Adam) to D and G
D_criterion = torch.nn.BCELoss()
D_optimizer = optim.Adam(Dis_model.parameters(), lr=dis_lr,
betas=(0.5, 0.999))
#进行训练
for epoch in range(n_epoch):
D_running_loss = 0.0
# Discriminator
D_optimizer.zero_grad()
#inputs是类中forward的输入,使用类的__call__()函数隐式地使用了forward()函数
outputs = Dis_model(inputs)#相当于Dis_model.forward(inputs)
D_loss = D_criterion(outputs[:, 0], labels)#labels是标签
#反向传播
D_loss.backward(retain_graph=True)
#参数更新
D_optimizer.step()
以上代码只是表示运行过程,并不能实际运行,因为有很多过程被忽略。下面是可以运行的代码:
DCGAN.py
# -*- coding: utf-8 -*-
"""
Created on Wed Jan 15 10:02:47 2020
@author: liwj128260
"""
# -*- coding: utf-8 -*-
# @Author: aaronlai
import torch.nn as nn
import torch.nn.functional as F
class DCGAN_Discriminator(nn.Module):
def __init__(self, featmap_dim=512, n_channel=1):
#super().__init__()代表继承父类的属性
super(DCGAN_Discriminator, self).__init__()
self.featmap_dim = featmap_dim
self.conv1 = nn.Conv2d(n_channel, featmap_dim // 4, 5,
stride=2, padding=2)
self.conv2 = nn.Conv2d(featmap_dim // 4, featmap_dim //2, 5,
stride=2, padding=2)
self.BN2 = nn.BatchNorm2d(featmap_dim // 2)
self.conv3 = nn.Conv2d(featmap_dim // 2, featmap_dim, 5,
stride=2, padding=2)
self.BN3 = nn.BatchNorm2d(featmap_dim)
self.fc = nn.Linear(featmap_dim * 4 * 4, 1)
def forward(self, x):
"""
Strided convulation layers,
Batch Normalization after convulation but not at input layer,
LeakyReLU activation function with slope 0.2.
"""
x = F.leaky_relu(self.conv1(x), negative_slope=0.2)
x = F.leaky_relu(self.BN2(self.conv2(x)), negative_slope=0.2)
x = F.leaky_relu(self.BN3(self.conv3(x)), negative_slope=0.2)
x = x.view(-1, self.featmap_dim * 4 * 4)
x = F.sigmoid(self.fc(x))
return x
class DCGAN_Generator(nn.Module):
def __init__(self, featmap_dim=1024, n_channel=1, noise_dim=100):
super(DCGAN_Generator, self).__init__()
self.featmap_dim = featmap_dim
self.fc1 = nn.Linear(noise_dim, 4 * 4 * featmap_dim)
self.conv1 = nn.ConvTranspose2d(featmap_dim, (featmap_dim // 2), 5,
stride=2, padding=2)
self.BN1 = nn.BatchNorm2d(featmap_dim // 2)
self.conv2 = nn.ConvTranspose2d(featmap_dim // 2, featmap_dim // 4, 6,
stride=2, padding=2)
self.BN2 = nn.BatchNorm2d(featmap_dim // 4)
self.conv3 = nn.ConvTranspose2d(featmap_dim // 4, n_channel, 6,
stride=2, padding=2)
def forward(self, x):
"""
Project noise to featureMap * width * height,
Batch Normalization after convulation but not at output layer,
ReLU activation function.
"""
x = self.fc1(x)
x = x.view(-1, self.featmap_dim, 4, 4)
x = F.relu(self.BN1(self.conv1(x)))
x = F.relu(self.BN2(self.conv2(x)))
x = F.tanh(self.conv3(x))
return x
run_DCGAN.py
# -*- coding: utf-8 -*-
"""
Created on Wed Jan 15 10:04:04 2020
@author: liwj128260
"""
# -*- coding: utf-8 -*-
# @Author: aaronlai
import torch
import torch.optim as optim
import torchvision
import torchvision.transforms as transforms
import numpy as np
from torch.autograd import Variable
from DCGAN import DCGAN_Discriminator, DCGAN_Generator
def load_dataset(batch_size=10, download=True):
"""
The output of torchvision datasets are PILImage images of range [0, 1].
Transform them to Tensors of normalized range [-1, 1]
"""
transform = transforms.Compose([transforms.ToTensor(),
transforms.Normalize([0.5], [0.5])])
trainset = torchvision.datasets.MNIST(root='../data', train=True,
download=download,
transform=transform)
trainloader = torch.utils.data.DataLoader(trainset, batch_size=batch_size,
shuffle=True)
testset = torchvision.datasets.MNIST(root='../data', train=False,
download=download,
transform=transform)
testloader = torch.utils.data.DataLoader(testset, batch_size=batch_size,
shuffle=False)
return trainloader, testloader
def gen_noise(n_instance, n_dim=2):
"""generate n-dim uniform random noise"""
return torch.Tensor(np.random.uniform(low=-1.0, high=1.0,
size=(n_instance, n_dim)))
def train_DCGAN(Dis_model, Gen_model, D_criterion, G_criterion, D_optimizer,
G_optimizer, trainloader, n_epoch, batch_size, noise_dim,
n_update_dis=1, n_update_gen=1, use_gpu=False, print_every=10,
update_max=None):
"""train DCGAN and print out the losses for D and G"""
for epoch in range(n_epoch):
D_running_loss = 0.0
G_running_loss = 0.0
for i, data in enumerate(trainloader, 0):
# get the inputs from true distribution
true_inputs, _ = data
if use_gpu:
true_inputs = true_inputs.cuda()
true_inputs = Variable(true_inputs)
# get the inputs from the generator
noises = gen_noise(batch_size, n_dim=noise_dim)
if use_gpu:
noises = noises.cuda()
fake_inputs = Gen_model(Variable(noises))
inputs = torch.cat([true_inputs, fake_inputs])
# get the labels
labels = np.zeros(2 * batch_size)
labels[:batch_size] = 1
labels = torch.from_numpy(labels.astype(np.float32))
if use_gpu:
labels = labels.cuda()
labels = Variable(labels)
# Discriminator
D_optimizer.zero_grad()
outputs = Dis_model(inputs)#使用类的__call__()显示使用forward()函数
D_loss = D_criterion(outputs[:, 0], labels)
if i % n_update_dis == 0:
D_loss.backward(retain_graph=True)
D_optimizer.step()
# Generator
if i % n_update_gen == 0:
G_optimizer.zero_grad()
G_loss = G_criterion(outputs[batch_size:, 0],
labels[:batch_size])
G_loss.backward()
G_optimizer.step()
# print statistics
D_running_loss += D_loss.item()
G_running_loss += G_loss.item()
if i % print_every == (print_every - 1):
print('[%d, %5d] D loss: %.3f ; G loss: %.3f' %
(epoch+1, i+1, D_running_loss / print_every,
G_running_loss / print_every))
D_running_loss = 0.0
G_running_loss = 0.0
if update_max and i > update_max:
break
print('Finished Training')
def run_DCGAN(n_epoch=2, batch_size=50, use_gpu=False, dis_lr=1e-5,
gen_lr=1e-4, n_update_dis=1, n_update_gen=1, noise_dim=10,
D_featmap_dim=512, G_featmap_dim=1024, n_channel=1,
update_max=None):
# loading data
trainloader, testloader = load_dataset(batch_size=batch_size)
# initialize models
Dis_model = DCGAN_Discriminator(featmap_dim=D_featmap_dim,
n_channel=n_channel)
Gen_model = DCGAN_Generator(featmap_dim=G_featmap_dim, n_channel=n_channel,
noise_dim=noise_dim)
if use_gpu:
Dis_model = Dis_model.cuda()
Gen_model = Gen_model.cuda()
# assign loss function and optimizer (Adam) to D and G
D_criterion = torch.nn.BCELoss()
D_optimizer = optim.Adam(Dis_model.parameters(), lr=dis_lr,
betas=(0.5, 0.999))
G_criterion = torch.nn.BCELoss()
G_optimizer = optim.Adam(Gen_model.parameters(), lr=gen_lr,
betas=(0.5, 0.999))
train_DCGAN(Dis_model, Gen_model, D_criterion, G_criterion, D_optimizer,
G_optimizer, trainloader, n_epoch, batch_size, noise_dim,
n_update_dis, n_update_gen, update_max=update_max)
if __name__ == '__main__':
run_DCGAN(D_featmap_dim=64, G_featmap_dim=128)
6、图形化展示训练结果
在pytorch中可以使用visdom工具做可视化:
1、在命令行输入:python -m visdom.server,开启web服务,出现
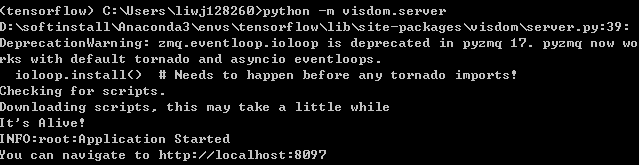
然后将网址输入到浏览器,打开界面
2、在python中(可以是编译器spyder中),输入测试程序
import torch
import visdom
vis = visdom.Visdom(env='test1')
x = torch.arange(1,30,0.01)
y = torch.sin(x)
vis.line(X=x,Y=y,win='sinx',opts={'title':'y=sin(x)'})
Environment选择test1,显示出如下所示的正旋波形图

代码参考自
:https://blog.csdn.net/nanxiaoting/article/details/81395579
