线性滤波:
1.方框滤波:模糊图像
2.均值滤波:模糊图像
3.高斯滤波:信号的平滑处理,去除符合正太分布的噪声
非线性滤波
1.中值滤波:去除椒盐噪声
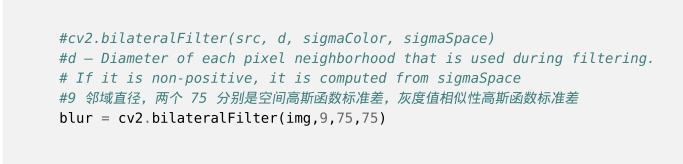
2.双边滤波:保边去噪
参考文章:https://blog.csdn.net/qq_30815237/article/details/86690190
2D卷积(线性滤波)
理解可以参考:https://blog.csdn.net/zouxy09/article/details/49080029
线性滤波可以说是图像处理最基本的方法,它可以允许我们对图像进行处理,产生很多不同的效果。做法很简单。首先,我们有一个二维的滤波器矩阵(有个高大上的名字叫卷积核)和一个要处理的二维图像。然后,对于图像的每一个像素点,计算它的邻域像素和滤波器矩阵的对应元素的乘积,然后加起来,作为该像素位置的值。这样就完成了滤波过程。
dst=cv.filter2D(src, ddepth, kernel[, dst[, anchor[, delta[, borderType]]]])
src 原图像
dst 目标图像,与原图像尺寸和通过数相同
ddepth 目标图像的所需深度
kernel 卷积核(或相当于相关核),单通道浮点矩阵;如果要将不同的内核应用于不同的通道,请使用拆分将图像拆分为单独的颜色平面,然后单独处理它们。
anchor 内核的锚点,指示内核中过滤点的相对位置;锚应位于内核中;默认值(-1,-1)表示锚位于内核中心。
detal 在将它们存储在dst中之前,将可选值添加到已过滤的像素中。类似于偏置。
borderType 像素外推法,参见BorderTypes
下面是一个 5x5 的平均滤波器核
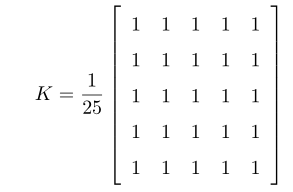
操作如下?将核放在图像的一个像素 A 上?求与核对应的图像上 25?5x5?
个像素的和?在取平均数?用?个平均数替代像素 A 的值。(均值滤波)
kernel 卷积核要求
1)滤波器的大小应该是奇数,这样它才有一个中心,例如3x3,5x5或者7x7。有中心了,也有了半径的称呼,例如5x5大小的核的半径就是2。
2)滤波器矩阵所有的元素之和应该要等于1,这是为了保证滤波前后图像的亮度保持不变。当然了,这不是硬性要求了。
3)如果滤波器矩阵所有元素之和大于1,那么滤波后的图像就会比原图像更亮,反之,如果小于1,那么得到的图像就会变暗。如果和为0,图像不会变黑,但也会非常暗。
4)对于滤波后的结构,可能会出现负数或者大于255的数值。对这种情况,我们将他们直接截断到0和255之间即可。对于负数,也可以取绝对值。

中值滤波(归一化卷积框)
在一连串数字{1,4,6,8,9}中,数字6就是这串数字的中值。由此我们可以应用到图像处理中。依然我们在图像中去3*3的矩阵,里面有9个像素点,我们将9个像素进行排序,最后将这个矩阵的中心点赋值为这九个像素的中值。

均值滤波——blur函数
图片中一个方块区域(一般为3*3)内,中心点的像素为全部点像素值的平均值。
均值滤波是最简单的一种滤波操作,输出图像的每一个像素是核窗口内输入图像对应像素的像素的平均值( 所有像素加权系数相等),其实说白了它就是归一化后的方框滤波。blur函数内部中其实就是调用了一boxFilter。
均值滤波是典型的线性滤波算法,主要方法为邻域平均法,即用一片图像区域的各个像素的均值来代替原图像中的各个像素值。一般需要在图像上对目标像素给出一个模板(内核),该模板包括了其周围的临近像素(比如以目标像素为中心的周围8(3x3-1)个像素,构成一个滤波模板,即去掉目标像素本身)。再用模板中的全体像素的平均值来代替原来像素值。即对待处理的当前像素点(x,y),选择一个模板,该模板由其近邻的若干像素组成,求模板中所有像素的均值,再把该均值赋予当前像素点(x,y),作为处理后图像在该点上的灰度g(x,y),即g(x,y)=1/m ∑f(x,y) ,其中m为该模板中包含当前像素在内的像素总个数。
均值滤波的缺陷:
均值滤波本身存在着固有的缺陷,即它不能很好地保护图像细节,在图像去噪的同时也破坏了图像的细节部分,从而使图像变得模糊,不能很好地去除噪声点。
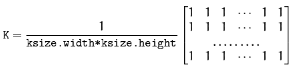
boxFilter()函数的介绍。如果均衡化(即normalize==ture,这也是默认值),则其本质是均值滤波

blur函数文档中,给出的其核是这样的:
均值滤波——blur函数
(调用blur()等效于调用将normalize=true的boxFilter())

均值滤波是最简单的一种滤波操作,输出图像的每一个像素是核窗口内输入图像对应像素的像素的平均值( 所有像素加权系数相等),其实说白了它就是归一化后的方框滤波。blur函数内部中其实就是调用了一boxFilter。
均值滤波是典型的线性滤波算法,主要方法为邻域平均法,即用一片图像区域的各个像素的均值来代替原图像中的各个像素值。一般需要在图像上对目标像素给出一个模板(内核),该模板包括了其周围的临近像素(比如以目标像素为中心的周围8(3x3-1)个像素,构成一个滤波模板,即去掉目标像素本身)。再用模板中的全体像素的平均值来代替原来像素值。即对待处理的当前像素点(x,y),选择一个模板,该模板由其近邻的若干像素组成,求模板中所有像素的均值,再把该均值赋予当前像素点(x,y),作为处理后图像在该点上的灰度g(x,y),即g(x,y)=1/m ∑f(x,y) ,其中m为该模板中包含当前像素在内的像素总个数。
均值滤波的缺陷:
均值滤波本身存在着固有的缺陷,即它不能很好地保护图像细节,在图像去噪的同时也破坏了图像的细节部分,从而使图像变得模糊,不能很好地去除噪声点。
blur函数文档中,给出的其核是这样的:
高斯滤波——GaussianBlur函数
高斯滤波是一种线性平滑滤波,适用于消除高斯噪声,广泛应用于图像处理的减噪过程。通俗的讲,高斯滤波就是对整幅图像进行加权平均的过程,每一个像素点的值,都由其本身和邻域内的其他像素值经过加权平均后得到。高斯滤波的具体操作是:用一个模板(或称卷积、掩模)扫描图像中的每一个像素,用模板确定的邻域内像素的加权平均灰度值去替代模板中心像素点的值。高斯滤波最有用的滤波操作,虽然效率往往不是最高的。需要注意的是opencv中的GaussianBlur()是高斯低通滤波器,用来模糊减噪,所以叫高斯模糊。
高斯模糊技术生成的图像,其视觉效果就像是经过一个半透明屏幕在观察图像,这与镜头焦外成像效果散景以及普通照明阴影中的效果都明显不同。高斯平滑也用于计算机视觉算法中的预先处理阶段,以增强图像在不同比例大小下的图像效果(参见尺度空间表示以及尺度空间实现)。从数学的角度来看,图像的高斯模糊过程就是图像与正态分布做卷积。由于正态分布又叫作高斯分布,所以这项技术就叫作高斯模糊。
图像与圆形方框模糊做卷积将会生成更加精确的焦外成像效果。由于高斯函数的傅立叶变换是另外一个高斯函数,所以高斯模糊对于图像来说就是一个低通滤波操作。高斯滤波器是一类根据高斯函数的形状来选择权值的线性平滑滤波器。高斯平滑滤波器对于抑制服从正态分布的噪声非常有效。对于图像处理来说,常用二维零均值离散高斯函数作平滑滤波器。
一维零均值高斯函数和二维高斯函数为:
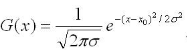

其中,高斯分布参数Sigma决定了高斯函数的宽度。sigma的取值决定了高斯函数窗口的大小。在实际中经常看到sigma取值0.8或者1。正常情况下我们由高斯函数计算得到的模板是浮点型数,即double,但是有些情况我们为了加快计算需要将模板处理成整数
https://blog.csdn.net/yansmile1/article/details/46275791
GaussianBlur函数的作用是用高斯滤波器来模糊一张图片,对输入的图像src进行高斯滤波后用dst输出。它将源图像和指定的高斯核函数做卷积运算,并且支持就地过滤(In-placefiltering)。
https://blog.csdn.net/poem_qianmo/article/details/23184547

双边滤波