一、ROS的五个特点:
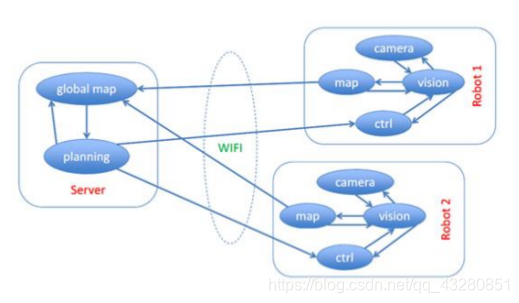
1、点对点设计
点对点的设计通俗的讲就是一个大的工程项目,每个动能相互是独立的,或者耦合比较低。有一个大脑负责总的任务调度,为服务和客户建立连接充当媒介。各个功能之间可以通过无线和有线连接。
2、多语言支持
语言无关的接口定义可以使一个大的项目里可以有很多种语言,便于代码的移植,比如说一个人脸识别的项目,摄像头打开的功能可以使用python编写,而图像处理的功能可以用c++编写,从而提高编程效率。
3、架构精简,集成度高
ROS 集成了很多专业级的功能包,有的时候我们只需要调用相应的API就可以,比如opencv,专门用于图像处理,我们只需要到官网上将相应的包下载到自己的电脑就可以完成自己的功能。

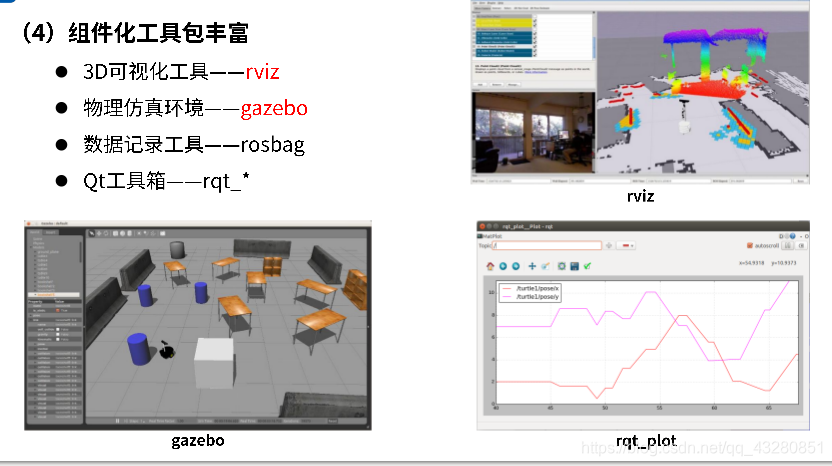
4、工具包丰富
ROS提供了很多有用的可视化工具包,可以有效地帮助我们3D建模,数据分析。
5、免费,开源
ROS提供了很多免费开源的软件包,方便程序开发

