视觉SLAM笔记(53) g2o 操作后端优化
1. BA 数据集
目录下的 common 文件夹是实验的数据集部分
它的布局如图所示
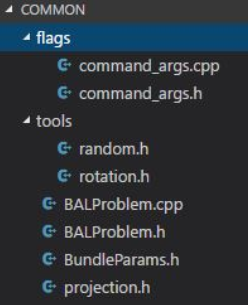
其中, flags 文件夹下的两个文件定义了 CommandArgs 这个类
该类是用来解析用户输入的参数,同时也对程序需要的参数提供默认值以及文档说明
BundleParams 这个类定义了 Bundle Adjustment 使用的所有参数,也调用了 CommandArgs 类型的变量
由于 CommandArgs 这个类的存在,可以直接对程序后面使用 -help 来查看程序
所有的参数含义,使用的方式可以参考该程序中 BundleParams 类型的写法
tools 是一些数学工具函数
相机和路标参数和 视觉SLAM笔记(52) BA 与图优化 提到的代价函数,即保持一致
不过在实验中要把相机内参也当作优化变量考虑进去
用 f, k1, k2 来表示焦距和畸变,三个参数表示平移,三个参数表示旋转(于是相机一共 9 个未知量),路标也使用三维坐标来表示
projection.h 是 投影计算流程图 的代码实现
由于 g2o 和 后续的ceres 都会用到这个投影模型,这个文件也将被两个工程所共享
2. g2o 求解 BA
和以前一样, g2o 使用图模型来描述问题的结构
所以要用节点来表示相机和路标,然后用边来表示它们之间的观测
仍然使用自定义的点和边,只需覆盖一些关键函数即可
针对相机和路标,可以定义如下继承,使用 override 关键字来表示对基类虚函数的覆盖:
#include <Eigen/Core>
#include "ceres/autodiff.h"
#include "g2o/core/base_vertex.h"
#include "g2o/core/base_binary_edge.h"
#include "tools/rotation.h"
#include "common/projection.h"
class VertexCameraBAL : public g2o::BaseVertex<9, Eigen::VectorXd>
{
public:
EIGEN_MAKE_ALIGNED_OPERATOR_NEW;
VertexCameraBAL() {}
virtual bool read(std::istream& /*is*/)
{
return false;
}
virtual bool write(std::ostream& /*os*/) const
{
return false;
}
virtual void setToOriginImpl() {}
virtual void oplusImpl(const double* update) override
{
Eigen::VectorXd::ConstMapType v(update, VertexCameraBAL::Dimension);
_estimate += v;
}
};
class VertexPointBAL : public g2o::BaseVertex<3, Eigen::Vector3d>
{
public:
EIGEN_MAKE_ALIGNED_OPERATOR_NEW;
VertexPointBAL() {}
virtual bool read(std::istream& /*is*/)
{
return false;
}
virtual bool write(std::ostream& /*os*/) const
{
return false;
}
virtual void setToOriginImpl() {}
virtual void oplusImpl(const double* update) override
{
Eigen::Vector3d::ConstMapType v(update);
_estimate += v;
}
};
定义了节点以后,也还需要定义边来表示节点之间的联系
每一条边都对应了一个代价函数
同时为了避免复杂的求导运算,借助 ceres 库当中的 Autodiff(即自动求导) 功能
该功能需要类型将需要求导的公式实现在括号运算符 operator() 里
所以代码写成如下的样子:
class EdgeObservationBAL : public g2o::BaseBinaryEdge<2, Eigen::Vector2d, VertexCameraBAL, VertexPointBAL>
{
public:
EIGEN_MAKE_ALIGNED_OPERATOR_NEW;
EdgeObservationBAL() {}
virtual bool read(std::istream& /*is*/)
{
return false;
}
virtual bool write(std::ostream& /*os*/) const
{
return false;
}
virtual void computeError() override // 覆盖基类函数,使用operator()计算代价函数
{
const VertexCameraBAL* cam = static_cast<const VertexCameraBAL*> (vertex(0));
const VertexPointBAL* point = static_cast<const VertexPointBAL*> (vertex(1));
(*this) (cam->estimate().data(), point->estimate().data(), _error.data());
}
// 为了使用 Ceres 求导功能而定义的函数,让本类成为拟函数类
template<typename T>
bool operator() (const T* camera, const T* point, T* residuals) const
{
T predictions[2];
CamProjectionWithDistortion(camera, point, predictions);
residuals[0] = predictions[0] - T(measurement() (0));
residuals[1] = predictions[1] - T(measurement() (1));
return true;
}
virtual void linearizeOplus() override
{
// 使用数字雅可比矩阵
// BaseBinaryEdge<2, Vector2d, VertexCameraBAL, VertexPointBAL>::linearizeOplus();
// return;
// using autodiff from ceres. Otherwise, the system will use g2o numerical diff for Jacobians
const VertexCameraBAL* cam = static_cast<const VertexCameraBAL*> (vertex(0));
const VertexPointBAL* point = static_cast<const VertexPointBAL*> (vertex(1));
typedef ceres::internal::AutoDiff<EdgeObservationBAL, double, VertexCameraBAL::Dimension, VertexPointBAL::Dimension> BalAutoDiff;
Eigen::Matrix<double, Dimension, VertexCameraBAL::Dimension, Eigen::RowMajor> dError_dCamera;
Eigen::Matrix<double, Dimension, VertexPointBAL::Dimension, Eigen::RowMajor> dError_dPoint;
double *parameters[] = { const_cast<double*> (cam->estimate().data()), const_cast<double*> (point->estimate().data()) };
double *jacobians[] = { dError_dCamera.data(), dError_dPoint.data() };
double value[Dimension];
// Ceres 中的自动求导函数用法,需要提供 operator() 函数成员
bool diffState = BalAutoDiff::Differentiate(*this, parameters, Dimension, value, jacobians);
// copy over the Jacobians (convert row-major -> column-major)
if (diffState)
{
_jacobianOplusXi = dError_dCamera;
_jacobianOplusXj = dError_dPoint;
}
else
{
assert(0 && "Error while differentiating");
_jacobianOplusXi.setZero();
_jacobianOplusXi.setZero();
}
}
};
以上定义了本问题中使用的节点和边
下面就需要根据 BALProblem 类当中的实际数据来生成一些节点和边,交给 g2o 进行优化
值得注意的是,为了充分利用 BA 中的稀疏性,需要在这里将路标中的 setMarginalized 属性设置为 true
下面是代码的主要片段:
void BuildProblem(const BALProblem* bal_problem, g2o::SparseOptimizer* optimizer, const BundleParams& params)
{
const int num_points = bal_problem->num_points();
const int num_cameras = bal_problem->num_cameras();
const int camera_block_size = bal_problem->camera_block_size();
const int point_block_size = bal_problem->point_block_size();
// 添加相机和对应的初始值
const double* raw_cameras = bal_problem->cameras();
for (int i = 0; i < num_cameras; ++i)
{
ConstVectorRef temVecCamera(raw_cameras + camera_block_size * i, camera_block_size);
VertexCameraBAL* pCamera = new VertexCameraBAL();
pCamera->setEstimate(temVecCamera); // 初始值
pCamera->setId(i); // 为每个相机顶点设置id
optimizer->addVertex(pCamera); // 添加顶点优化
}
// 在数据集中设置具有初始值的顶点
const double* raw_points = bal_problem->points();
// const int point_block_size = bal_problem->point_block_size();
for (int j = 0; j < num_points; ++j)
{
ConstVectorRef temVecPoint(raw_points + point_block_size * j, point_block_size);
VertexPointBAL* pPoint = new VertexPointBAL();
pPoint->setEstimate(temVecPoint); // 点云的初始值
pPoint->setId(j + num_cameras); // 为了不和相机冲突,加上相机的 id
// 设置该点在解方程时进行 Schur 消元
pPoint->setMarginalized(true);
optimizer->addVertex(pPoint);
}
// 为图添加边
const int num_observations = bal_problem->num_observations();
const double* observations = bal_problem->observations(); // 第一次观察的指针
for (int i = 0; i < num_observations; ++i)
{
EdgeObservationBAL* bal_edge = new EdgeObservationBAL();
const int camera_id = bal_problem->camera_index()[i]; // 使用前面的 id 获取相机
const int point_id = bal_problem->point_index()[i] + num_cameras; // 使用前面的 id 获得点
// Huber loss 函数
if (params.robustify)
{
g2o::RobustKernelHuber* rk = new g2o::RobustKernelHuber;
rk->setDelta(1.0);
bal_edge->setRobustKernel(rk);
}
// 设置边所对应的两个节点
bal_edge->setVertex(0, dynamic_cast<VertexCameraBAL*>(optimizer->vertex(camera_id)));
bal_edge->setVertex(1, dynamic_cast<VertexPointBAL*>(optimizer->vertex(point_id)));
// 设置其协方差矩阵(在此处为单位矩阵)
bal_edge->setInformation(Eigen::Matrix2d::Identity());
// 设置边所对应的观测值
bal_edge->setMeasurement(Eigen::Vector2d(observations[2 * i + 0], observations[2 * i + 1]));
optimizer->addEdge(bal_edge);
}
}
3. 求解
在使用 g2o 时,求解的设置无非在于这几种:
- 使用何种方法(LM, DogLeg)等来定义非线性优化的下降策略
- 使用哪类线性求解器
注意到这里需要使用到稀疏性,所以必须选用稀疏的求解器
void SetSolverOptionsFromFlags(BALProblem* bal_problem, const BundleParams& params, g2o::SparseOptimizer* optimizer)
{
std::unique_ptr<BalBlockSolver> solver_ptr;
std::unique_ptr<BalBlockSolver::LinearSolverType> linearSolver;
// 使用稠密计算方法
if (params.linear_solver == "dense_schur") {
linearSolver = g2o::make_unique<BalDenseSolver>();
}
// 使用稀疏计算方法
else if (params.linear_solver == "sparse_schur") {
auto cholesky = g2o::make_unique<g2o::LinearSolverCholmod<BalBlockSolver::PoseMatrixType>>();
cholesky->setBlockOrdering(true); // 让 solver 对矩阵进行排序保持稀疏性
linearSolver = std::move(cholesky);
}
// solver_ptr = new BalBlockSolver(linearSolver);
solver_ptr = g2o::make_unique<BalBlockSolver>(std::move(linearSolver));
g2o::OptimizationAlgorithmWithHessian* solver;
if (params.trust_region_strategy == "levenberg_marquardt") {
// solver = new g2o::OptimizationAlgorithmLevenberg(solver_ptr);
solver = new g2o::OptimizationAlgorithmLevenberg(std::move(solver_ptr)); // 使用 LM 下降法
}
else if (params.trust_region_strategy == "dogleg") {
// solver = new g2o::OptimizationAlgorithmDogleg(solver_ptr);
solver = new g2o::OptimizationAlgorithmDogleg(std::move(solver_ptr)); // 使用 DogLeg 下降法
}
else
{
std::cout << "Please check your trust_region_strategy parameter again.." << std::endl;
exit(EXIT_FAILURE);
}
optimizer->setAlgorithm(solver);
}
现在问题基本上搭建好了
通过 BuildProblem 函数完成了对目标函数的构造,也通过 SetSolverOptionsFromFlags 函数通过用户的输入参数来设置优化求解
剩下需要做的就是思考该如何求解这个问题了
有了 g2o 这样的优化库,求解基本上可以一步完成,这点跟前面介绍的 g2o 用法几乎是一样的:
optimizer.initializeOptimization();
optimizer.setVerbose(true);
optimizer.optimize(params.num_iterations);
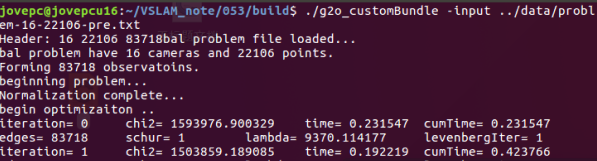
执行优化:
$ ./g2o_customBundle -input ../data/problem-16-22106-pre.txt
接下来,安装meshlab并用它把这两个文件打开:
$ sudo add-apt-repository ppa:zarquon42/meshlab
$ sudo apt-get update
$ sudo apt-get install meshlab
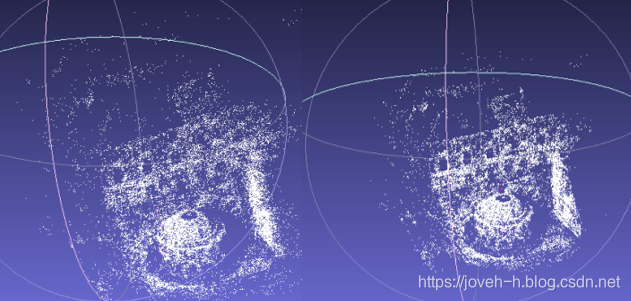
使用 Meshlab 分别打开 g2o 执行文件夹下的 initial.ply 和 final.ply 两个文件
$ meshlab initial.ply
$ meshlab final.ply
优化前后的效果如下图:
g2o 在做 Bundle Adjustment 的优化时必须要将其所有点云全部 Schur 掉,否则会出错!
其原因在于使用了g2o::LinearSolver<BalBlockSolver::PoseMatrixType> 这个类型来指定 linearsolver
其中模板参数当中的 PoseMatrixType 在程序中为相机姿态参数的维度
那么 Bundle Adjustment 当中 Schur 消元后解的线性方程组必须时只含有相机姿态变量
参考:
相关推荐:
视觉SLAM笔记(52) BA 与图优化
视觉SLAM笔记(51) 非线性系统和 EKF
视觉SLAM笔记(50) 线性系统和 KF
视觉SLAM笔记(49) 后端状态估计
视觉SLAM笔记(48) 局部地图
谢谢!
