OTSU算法是由日本学者OTSU于1979年提出的一种对图像进行二值化的高效算法。如下是C++实现opencv OTSU阈值化的代码(opencv版本是3.0):
头文件:
#include <stdio.h>
#include <string>
#include "opencv2/highgui/highgui.hpp"
#include "opencv2/opencv.hpp"
using namespace std;
using namespace cv;
大津法函数:
int OTSU(cv::Mat srcImage)
{
int nCols = srcImage.cols;
int nRows = srcImage.rows;
int threshold = 0;
// 初始化统计参数
int nSumPix[256];
float nProDis[256];
for (int i = 0; i < 256; i++)
{
nSumPix[i] = 0;
nProDis[i] = 0;
}
// 统计灰度级中每个像素在整幅图像中的个数
for (int i = 0; i < nCols; i++)
{
for (int j = 0; j < nRows; j++)
{
nSumPix[(int)srcImage.at<uchar>(i, j)]++;
}
}
// 计算每个灰度级占图像中的概率分布
for (int i = 0; i < 256; i++)
{
nProDis[i] = (float)nSumPix[i] / (nCols * nRows);
}
// 遍历灰度级[0,255],计算出最大类间方差下的阈值
float w0, w1, u0_temp, u1_temp, u0, u1, delta_temp;
double delta_max = 0.0;
for (int i = 0; i < 256; i++)
{
// 初始化相关参数
w0 = w1 = u0_temp = u1_temp = u0 = u1 = delta_temp = 0;
for (int j = 0; j < 256; j++)
{
//背景部分
if (j <= i)
{
// 当前i为分割阈值,第一类总的概率
w0 += nProDis[j];
u0_temp += j * nProDis[j];
}
//前景部分
else
{
// 当前i为分割阈值,第一类总的概率
w1 += nProDis[j];
u1_temp += j * nProDis[j];
}
}
// 分别计算各类的平均灰度
u0 = u0_temp / w0;
u1 = u1_temp / w1;
delta_temp = (float)(w0 *w1* pow((u0 - u1), 2));
// 依次找到最大类间方差下的阈值
if (delta_temp > delta_max)
{
delta_max = delta_temp;
threshold = i;
}
}
return threshold;
}
调用大津法函数:
int main()
{
// 图像读取及判断
cv::Mat srcImage = cv::imread("SrcImage.jpg");
if (!srcImage.data)
return 1;
// 灰度转换
cv::Mat srcGray;
cv::cvtColor(srcImage, srcGray, CV_RGB2GRAY);
cv::imshow("srcGray", srcGray);
// 调用OTSU二值化算法得到阈值
int ostuThreshold = OTSU(srcGray);
std::cout << ostuThreshold << std::endl;
// 定义输出结果图像
cv::Mat otsuResultImage =
cv::Mat::zeros(srcGray.rows, srcGray.cols, CV_8UC1);
// 利用得到的阈值实现二值化操作
for (int i = 0; i < srcGray.rows; i++)
{
for (int j = 0; j < srcGray.cols; j++)
{
// 满足大于阈值ostuThreshold置255
if (srcGray.at<uchar>(i, j) > ostuThreshold)
otsuResultImage.at<uchar>(i, j) = 255;
else
otsuResultImage.at<uchar>(i, j) = 0;
}
}
cv::imshow("ResultImage", otsuResultImage);
cv::waitKey(0);
return 0;
}
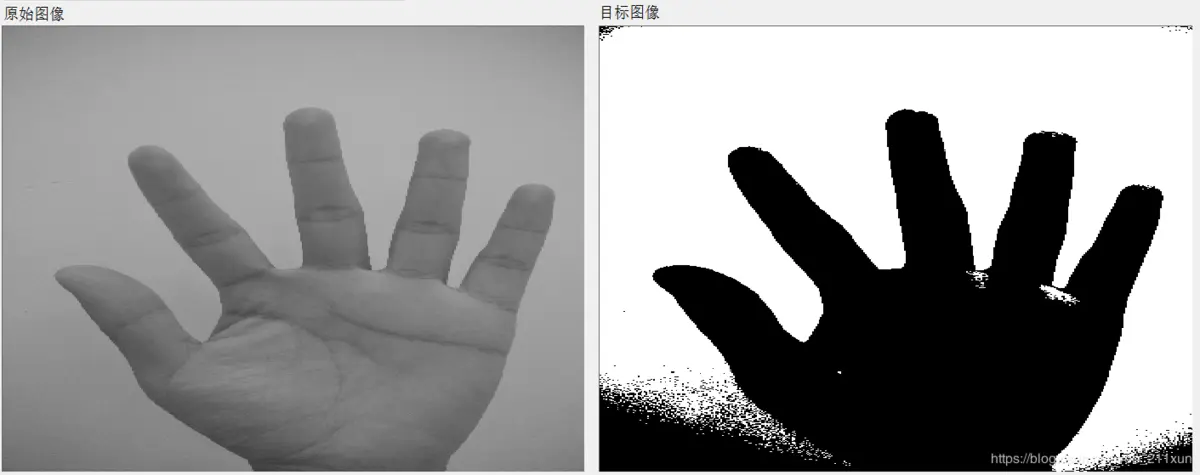
运行结果: