 版权声明:署名,允许他人基于本文进行创作,且必须基于与原先许可协议相同的许可协议分发本文 (Creative Commons)
版权声明:署名,允许他人基于本文进行创作,且必须基于与原先许可协议相同的许可协议分发本文 (Creative Commons)
opencv实战从0到N (9)—— 霍夫变换,直线与圆检测
霍夫线变换,圆变换
1,霍夫线变换是检测直线的一种方法,主要方法是判断多个点通过了同一条直线,首先使用极坐标表述一个点可能通过的所有直线,
则极坐标方程就是一条正弦曲线,通过比较多个点的正弦曲线知否交汇在同一点,即可判断它们是否通过同一条直线。
2,霍夫圆变换同霍夫线变换类似,在极坐标中使用圆心和坐标来表述一个圆,得到描述过一点所有圆的曲线,同样如果多个点交汇,
则说明这几个点在同一个圆上。
3,opencv函数:
(1)标准霍夫线变换
在OpenCV 中通过函数 HoughLines 来实现,得到一些极坐标参数
(2)统计概率霍夫线变换
在OpenCV 中它通过函数 HoughLinesP 来实现,得到直线的端点
(3)霍夫圆变换 HoughCircles( src_gray, circles, CV_HOUGH_GRADIENT, 1, src_gray.rows/8, 200, 100, 0, 0 );
函数带有以下自变量:
src_gray: 输入图像 (灰度图)
circles: 存储下面三个参数: 集合的容器来表示每个检测到的圆.
CV_HOUGH_GRADIENT: 指定检测方法. 现在OpenCV中只有霍夫梯度法
dp = 1: 累加器图像的反比分辨率
min_dist = src_gray.rows/8: 检测到圆心之间的最小距离
param_1 = 200: Canny边缘函数的高阈值
param_2 = 100: 圆心检测阈值.
min_radius = 0: 能检测到的最小圆半径, 默认为0.
max_radius = 0: 能检测到的最大圆半径, 默认为0
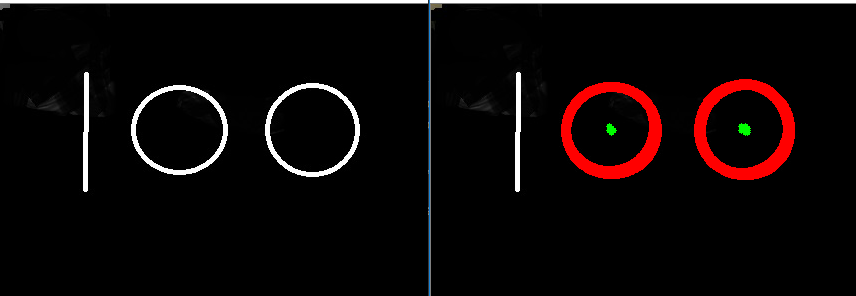
4,程序测试:
void main()
{
Mat src, dst,gray;
/// 装载图像
src = imread("5.jpg");
cvtColor(src, gray,CV_BGR2GRAY);
imshow("src", gray);
GaussianBlur(gray, gray, Size(3, 3), 1, 2);
vector<Vec4i> lines;
vector<Vec3f> circles;
//HoughLinesP(gray, lines, 1, CV_PI / 20, 200, 20, 10);
HoughCircles(gray, circles, CV_HOUGH_GRADIENT, 1, 1, 200, 60, 0, 2000);
//for (size_t i = 0; i < lines.size(); i++)
//{
// Vec4i l = lines[i];
// line(src, Point(l[0], l[1]), Point(l[2], l[3]), Scalar(0, 0, 255), 3, CV_AA);
//}
for (size_t i = 0; i < circles.size(); i++)
{
Point center(cvRound(circles[i][0]), cvRound(circles[i][1]));
int radius = cvRound(circles[i][2]);
// circle center
circle(src, center, 3, Scalar(0, 255, 0), -1, 8, 0);
// circle outline
circle(src, center, radius, Scalar(0, 0, 255), 3, 8, 0);
}
imshow("dst", src);
waitKey(0);
}
更多内容关注微信公众号:ML_Study