HashMap多线程会导致HashMap的Entry链表形成环形数据结构,一旦形成环形数据结构,Entry的next节点永远不为空,就会产生死循环获取Entry。
HashTable使用synchronized来保证线程安全,但在线程竞争激烈的情况下HashTable的效率非常低下。因为当一个线程访问HashTable的同步方法,其他线程也访问HashTable的同步方法时,会进入阻塞或轮询状态。如线程1使用put进行元素添加,线程2不但不能使用put方法添加元素,也不能使用get方法来获取元素,所以竞争越激烈效率越低。
putIfAbsent() :没有这个值则放入map,有这个值则返回key本来对应的值。
一、预备知识
1、Hash算法:
散列,哈希:把任意长度的输入通过一种算法(散列),变换成为固定长度的输出,这个输出值就是散列值。属于压缩映射,容易产生哈希冲突。Hash算法有直接取余法等。
产生哈希冲突时解决办法:
- 开放寻址
- 再散列
- 链地址法(相同hash值的元素用链表串起来)
ConcurrentHashMap在发生hash冲突时采用了链地址法。md4,md5,sha-hash算法也属于hash算法,又称摘要算法。
常用hash算法的介绍:
(1) MD4 (2) MD5它对输入仍以512位分组,其输出是4个32位字的级联(3) SHA-1及其他。
2、位运算:
int类型的位

2的0次方 = 1,2的1次方=2…….,以上表格代表数字 (2的5次方+2的3次方)= 40
由上面的表格可以看出,数字类型在数字渐渐变大时,是由低位慢慢向高位扩展的。
Java实际保存int型时 正数 第31位 =0 负数:第31位=1
常用位运算有:
- 位与 & (1&1=1 1&0=0 0&0=0)
- 位或 | (1|1=1 1|0=1 0|0=0)
- 位非 ~( ~1=0 ~0=1)
- 位异或 ^ (1^1=0 1^0=1 0^0=0)
- <<有符号左移 >>有符号的右移 >>>无符号右移 例如:8 << 2 = 32 8>>2 = 2
取模的操作 a % (Math.pow(2,n)) 等价于 a&( Math.pow(2,n)-1)
有趣的取模性质:取模a % (2^n) 等价于 a & (2^n - 1),所以在map里的数组个数一定是2的乘方数,计算key值在哪个元素中的时候,就用位运算来快速定位。
3、位运算运用场景
Java中的类修饰符、成员变量修饰符、方法修饰符,比如Class类中
Java容器中的HashMap和ConcurrentHashMap的实现
权限控制或者商品属性
简单可逆加密,比如异或运算(1^1=0 ; 0^1=1 )
实战:权限控制,com.chj.thread.capt05.bitconvert.Permission
使用位运算的优劣势:
节省很多代码量、效率高、属性变动影响小、不直观

二、线程不安全的HashMap
HashMap 里面是一个数组,然后数组中每个元素是一个单向链表,因为多线程环境下,使用Hashmap进行put操作会引起死循环,导致CPU利用率接近100%,所以在并发情况下不能使用HashMap。
Java1.7的HashMap结构:
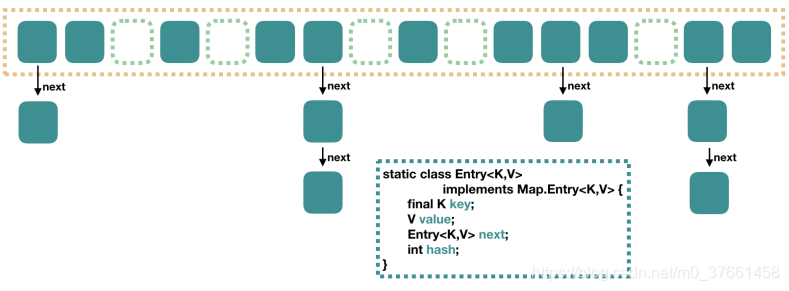
上图中,每个绿色的实体是嵌套类 Entry 的实例,Entry 包含四个属性:key, value, hash 值和用于单向链表的 next。
- capacity:当前数组容量,始终保持 2^n,可以扩容,扩容后数组大小为当前的 2 倍。
- loadFactor:负载因子,默认为 0.75。
- threshold:扩容的阈值,等于 capacity * loadFactor
1.术语定义
哈希算法hash algorithm:
是一种将任意内容的输入转换成相同长度输出的加密方式,其输出被称为哈希值。
哈希表hash table:
根据设定的哈希函数H(key)和处理冲突方法将一组关键字映象到一个有限的地址区间上,并以关键字在地址区间中的象作为记录在表中的存储位置,这种表称为哈希表或散列,所得存储位置称为哈希地址或散列地址。
2.put过程分析:
2.1源码分析:
public V put(K key, V value) {
// 当插入第一个元素的时候,需要先初始化数组大小
if (table == EMPTY_TABLE) {
inflateTable(threshold); //capacity * loadFactor
}
// 如果 key 为 null,感兴趣的可以往里看,最终会将这个 entry 放到 table[0] 中
if (key == null)
return putForNullKey(value);
// 1. 求 key 的 hash 值
int hash = hash(key);
// 2. 找到对应的数组下标
int i = indexFor(hash, table.length);
// 3. 遍历一下对应下标处的链表,看是否有重复的 key 已经存在,
// 如果有,直接覆盖,put 方法返回旧值就结束了
for (Entry<K,V> e = table[i]; e != null; e = e.next) {
Object k;
if (e.hash == hash && ((k = e.key) == key || key.equals(k))) {
V oldValue = e.value;
e.value = value;
e.recordAccess(this);
return oldValue;
}
}
modCount++;
// 4. 不存在重复的 key,将此 entry 添加到链表中,细节后面说
addEntry(hash, key, value, i);
return null;
}
2.2 数组初始化:
在第一个元素插入 HashMap 的时候做一次数组的初始化,就是先确定初始的数组大小,并计算数组扩容的阈值
private void inflateTable(int toSize) {
// 保证数组大小一定是 2 的 n 次方。
// 比如这样初始化:new HashMap(20),那么处理成初始数组大小是 32
int capacity = roundUpToPowerOf2(toSize);
// 计算扩容阈值:capacity * loadFactor
threshold = (int) Math.min(capacity * loadFactor, MAXIMUM_CAPACITY + 1);
// 算是初始化数组吧
table = new Entry[capacity];
initHashSeedAsNeeded(capacity); //ignore
}
2.3 添加节点到链表中:
找到数组下标后,会先进行 key 判重,如果没有重复,就准备将新值放入到链表的表头。
void addEntry(int hash, K key, V value, int bucketIndex) {
// 如果当前 HashMap 大小已经达到了阈值,并且新值要插入的数组位置已经有元素了,那么要扩容
if ((size >= threshold) && (null != table[bucketIndex])) {
// 扩容,后面会介绍一下
resize(2 * table.length);
// 扩容以后,重新计算 hash 值
hash = (null != key) ? hash(key) : 0;
// 重新计算扩容后的新的下标
bucketIndex = indexFor(hash, table.length);
}
// 往下看
createEntry(hash, key, value, bucketIndex);
}
// 这个很简单,其实就是将新值放到链表的表头,然后 size++
void createEntry(int hash, K key, V value, int bucketIndex) {
Entry<K,V> e = table[bucketIndex];
table[bucketIndex] = new Entry<>(hash, key, value, e);
size++;
}
3.get 过程分析
相对于 put 过程,get 过程是非常简单的。
1)根据 key 计算 hash 值。
2)找到相应的数组下标:hash & (length – 1)。
3)遍历该数组位置处的链表,直到找到相等(==或equals)的 key。
public V get(Object key) {
// 之前说过,key 为 null 的话,会被放到 table[0],所以只要遍历下 table[0] 处的链表就可以了
if (key == null)
return getForNullKey();
Entry<K,V> entry = getEntry(key);
return null == entry ? null : entry.getValue();
}
final Entry<K,V> getEntry(Object key) {
if (size == 0) { return null;}
int hash = (key == null) ? 0 : hash(key);
// 确定数组下标,然后从头开始遍历链表,直到找到为止
for (Entry<K,V> e = table[indexFor(hash, table.length)]; e != null; e = e.next) {
Object k;
if (e.hash == hash && ((k = e.key) == key || (key != null && key.equals(k))))
return e;
}
return null;
}
4.效率低下的HashTable容器
HashTable容器使用synchronized来保证线程安全,但在线程竞争激烈的情况下HashTable的效率非常低下。因为当一个线程访问HashTable的同步方法时,其他线程访问HashTable的同步方法时,可能会进入阻塞或轮询状态。如线程1使用put进行添加元素,线程2不但不能使用put方法添加元素,并且也不能使用get方法来获取元素,所以竞争越激烈效率越低。
三、JDK1.7中原理和实现
1、分段锁机制
Hashtable之所以效率低下主要是因为其实现使用了synchronized关键字对put等操作进行加锁,而synchronized关键字加锁是对整个对象进行加锁,也就是说在进行put等修改Hash表的操作时,锁住了整个Hash表,从而使得其表现的效率低下;因此,在JDK1.5~1.7版本,Java使用了分段锁机制实现ConcurrentHashMap。
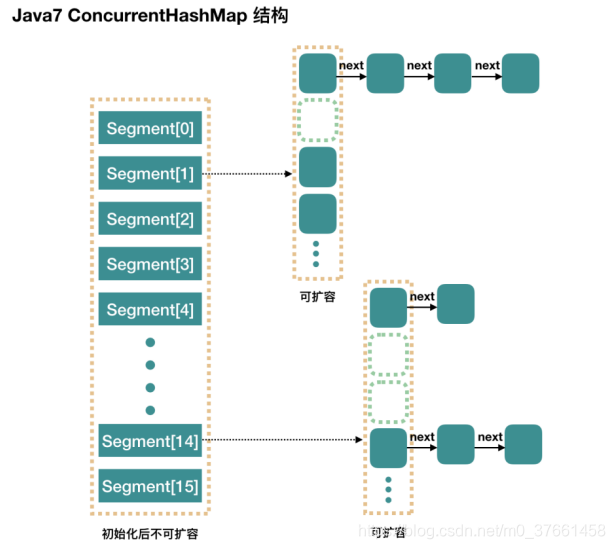
简而言之,ConcurrentHashMap在对象中保存了一个Segment数组,即将整个Hash表划分为多个分段;而每个Segment元素,即每个分段则类似于一个Hashtable;这样在执行put操作时首先根据hash算法定位到元素属于哪个Segment,然后对该Segment加锁即可。因此,ConcurrentHashMap在多线程并发编程中可是实现多线程put操作。接下来,本文将详细分析JDK1.7版本中ConcurrentHashMap的实现原理。
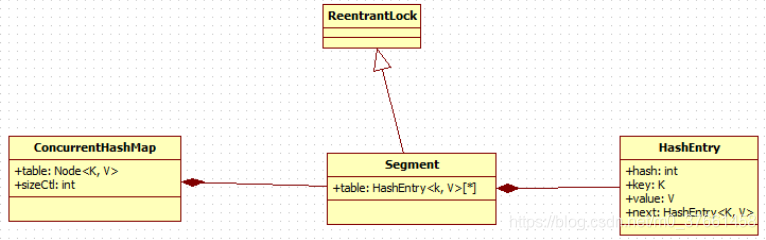
2、ConcurrentHashMap中的数据结构
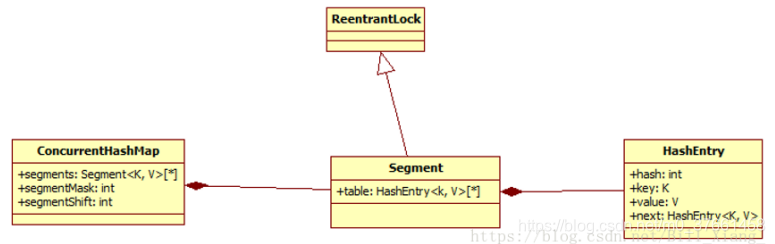
ConcurrentHashMap是由Segment<K, V>[]数组结构和HashEntry数组结构组成。Segment实际继承自可重入ReentrantLock,在ConcurrentHashMap里扮演锁的角色;HashEntry则用于存储键值对数据。一个ConcurrentHashMap里包含一个Segment数组,每个Segment里包含一个HashEntry数组,我们称之为table,每个HashEntry是一个链表结构的元素。
面试常问:
ConcurrentHashMap实现原理是怎么样的或者问ConcurrentHashMap如何在保证高并发下线程安全的同时实现了性能提升?
答:ConcurrentHashMap允许多个修改操作并发进行,其关键在于使用了锁分离技术。它使用了多个锁来控制对hash表的不同部分进行的修改。内部使用段(Segment)来表示这些不同的部分,每个段其实就是一个小的hash table,只要多个修改操作发生在不同的段上,它们就可以并发进行。
3、ConcurrentHashMap初始化
JDK1.7的ConcurrentHashMap的初始化主要分为两个部分:一是初始化ConcurrentHashMap,即初始化segments数组、segmentShift段偏移量和segmentMask段掩码等;然后则是初始化每个segment分段。
ConcurrentHashMap包含多个构造函数,而所有的构造函数最终都调用了如下的构造函数:
public ConcurrentHashMap(int initialCapacity, float loadFactor, int concurrencyLevel) {
if (!(loadFactor > 0) || initialCapacity < 0 || concurrencyLevel <= 0)
throw new IllegalArgumentException();
if (concurrencyLevel > MAX_SEGMENTS)
concurrencyLevel = MAX_SEGMENTS;
int sshift = 0;
int ssize = 1;
// 计算并行级别 ssize,因为要保持并行级别是 2 的 n 次方
while (ssize < concurrencyLevel) {
++sshift;
ssize <<= 1;
}
// 我们这里先不要那么烧脑,用默认值,concurrencyLevel 为 16,sshift 为 4
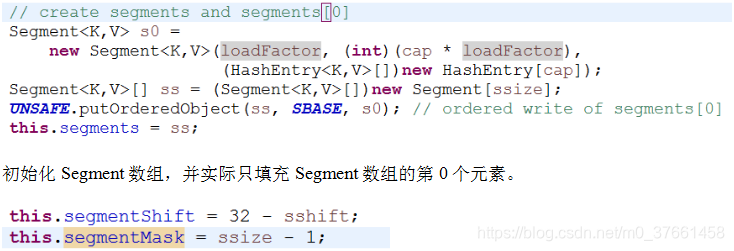
// 那么计算出 segmentShift 为 28,segmentMask 为 15,后面会用到这两个值
this.segmentShift = 32 - sshift;
this.segmentMask = ssize - 1;
if (initialCapacity > MAXIMUM_CAPACITY)
initialCapacity = MAXIMUM_CAPACITY;
// initialCapacity 是设置整个 map 初始的大小,
// 这里根据 initialCapacity 计算 Segment 数组中每个位置可以分到的大小
// 如 initialCapacity 为 64,那么每个 Segment 或称之为"槽"可以分到 4 个
int c = initialCapacity / ssize;
if (c * ssize < initialCapacity)
++c;
// 默认 MIN_SEGMENT_TABLE_CAPACITY 是 2,这个值也是有讲究的,因为这样的话,对于具体的槽上,
// 插入一个元素不至于扩容,插入第二个的时候才会扩容
int cap = MIN_SEGMENT_TABLE_CAPACITY;
while (cap < c)
cap <<= 1;
// 创建 Segment 数组,并创建数组的第一个元素 segment[0]
Segment<K,V> s0 = new Segment<K,V>(loadFactor, (int)(cap * loadFactor),
(HashEntry<K,V>[])new HashEntry[cap]);
Segment<K,V>[] ss = (Segment<K,V>[])new Segment[ssize];
// 往数组写入 segment[0]
UNSAFE.putOrderedObject(ss, SBASE, s0); // ordered write of segments[0]
this.segments = ss;
}
由代码可知,该构造函数需要传入三个参数:initialCapacity、loadFactor、concurrencyLevel,其中,concurrencyLevel主要用来初始化segments、segmentShift和segmentMask等;而initialCapacity和loadFactor则主要用来初始化每个Segment分段。
名词解释:
- initialCapacity:初始容量大小 ,默认16。
- loadFactor:扩容因子,默认0.75,当一个Segment存储的元素数量大于initialCapacity*
- loadFactor时,该Segment会进行一次扩容。 concurrencyLevel 并发度,默认16。
并发度可以理解为程序运行时能够同时更新ConccurentHashMap且不产生锁竞争的最大线程数,实际上就是ConcurrentHashMap中的分段锁个数,即Segment[]的数组长度。如果并发度设置的过小,会带来严重的锁竞争问题;如果并发度设置的过大,原本位于同一个Segment内的访问会扩散到不同的Segment中,CPU cache命中率会下降,从而引起程序性能下降。
3.1 初始化ConcurrentHashMap
根据ConcurrentHashMap的构造方法可知,在初始化时创建了两个中间变量ssize和sshift,它们都是通过concurrencyLevel计算得到的。其中ssize表示了segments数组的长度,为了能通过按位与的散列算法来定位segments数组的索引,必须保证segments数组的长度是2的N次方,所以在初始化时通过循环计算出一个大于或等于concurrencyLevel的最小的2的N次方值来作为数组的长度;而sshift表示了计算ssize时进行移位操作的次数。
segmentShift用于定位参与散列运算的位数,其等于32减去sshift,使用32是因为ConcurrentHashMap的hash()方法返回的最大数是32位的;segmentMask是散列运算的掩码,等于ssize减去1,所以掩码的二进制各位都为1。因为ssize的最大长度为65536,所以segmentShift最大值为16,segmentMask最大值为65535. 由于segmentShift和segmentMask与散列运算相关,因此之后还会对此进行分析。
构造方法中部分代码解惑:

保证Segment数组的大小,一定为2的幂,例如用户设置并发度为17,则实际Segment数组大小则为32

保证每个Segment中tabel数组的大小,一定为2的幂,初始化的三个参数取默认值时,table数组大小为2
用于定位元素所在segment。segmentShift表示偏移位数,通过前面的int类型的位的描述我们可以得知,int类型的数字在变大的过程中,低位总是比高位先填满的,为保证元素在segment级别分布的尽量均匀,计算元素所在segment时,总是取hash值的高位进行计算。segmentMask作用就是为了利用位运算中取模的操作:a % (Math.pow(2,n)) 等价于 a&( Math.pow(2,n)-1)
3.2 初始化Segment分段
ConcurrentHashMap通过initialCapacity和loadFactor来初始化每个Segment. 在初始化Segment时,也定义了一个中间变量cap,其等于initialCapacity除以ssize的倍数c,如果c大于1,则取大于等于c的2的N次方,cap表示Segment中HashEntry数组的长度;loadFactor表示了Segment的加载因子,通过cap*loadFactor获得每个Segment的阈值threshold.
默认情况下,initialCapacity等于16,loadFactor等于0.75,concurrencyLevel等于16.
3.3 定位Segment
由于采用了Segment分段锁机制实现一个高效的同步,那么首先则需要通过hash散列算法计算key的hash值,从而定位其所在的Segment. 因此,首先需要了解ConcurrentHashMap中hash()函数的实现。
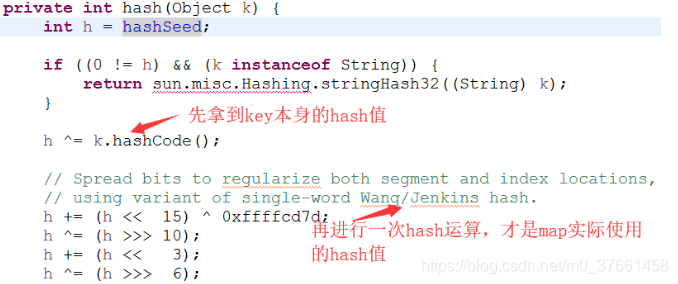
通过hash()函数可知,首先通过计算一个随机的hashSeed减少String类型的key值的hash冲突;然后利用Wang/Jenkins hash算法对key的hash值进行再hash计算。通过这两种方式都是为了减少散列冲突,从而提高效率。因为如果散列的质量太差,元素分布不均,那么使用Segment分段加锁也就没有意义了。

4、ConcurrentHashMap的操作
在介绍ConcurrentHashMap的操作之前,首先需要介绍一下Unsafe类,因为在JDK1.7新版本中是通过Unsafe类的方法实现锁操作的。Unsafe类是一个保护类,一般应用程序很少用到,但其在一些框架中经常用到,如JDK、Netty、Spring等框架。Unsafe类提供了一些硬件级别的原子操作,其在JDK1.7和JDK1.8中的ConcurrentHashMap都有用到,但其用法却不同,在此只介绍在JDK1.7中用到的几个方法:
- arrayBaseOffset(Class class):获取数组第一个元素的偏移地址。
- arrayIndexScale(Class class):获取数组中元素的增量地址。
- getObjectVolatile(Object obj, long offset):获取obj对象中offset偏移地址对应的Object型field属性值,支持Volatile读内存语义。
对于某个元素而言,一定是放在某个segment元素的某个table元素中的,所以在定位上,定位segment:取得key的hashcode值进行一次再散列(通过Wang/Jenkins算法),拿到再散列值后,以再散列值的高位进行取模得到当前元素在哪个segment上。

定位table:同样是取得key的再散列值以后,用再散列值的全部和table的长度进行取模,得到当前元素在table的哪个元素上。
4.1、Get() 方法:
JDK1.7的ConcurrentHashMap的get操作是不加锁的,因为在每个Segment中定义的HashEntry数组和在每个HashEntry中定义的value和next HashEntry节点都是volatile类型的,volatile类型的变量可以保证其在多线程之间的可见性,因此可以被多个线程同时读,从而不用加锁。而其get操作步骤也比较简单,定位Segment –> 定位HashEntry –> 通过getObjectVolatile()方法获取指定偏移量上的HashEntry –> 通过循环遍历链表获取对应值。
- 定位Segment:(((h >>> segmentShift) & segmentMask) << SSHIFT) + SBASE
- 定位HashEntry:(((tab.length - 1) & h)) << TSHIFT) + TBASE

定位segment和定位table后,依次扫描这个table元素下的的链表,要么找到元素,要么返回null。
在高并发下的情况下如何保证取得的元素是最新的?
答:用于存储键值对数据的HashEntry,在设计上它的成员变量value等都是volatile类型的,这样就保证别的线程对value值的修改,get方法可以马上看到。

4.2、put() 方法
ConcurrentHashMap的put方法就要比get方法复杂的多,其实现源码如下:
public V put(K key, V value) {
Segment<K,V> s;
if (value == null) throw new NullPointerException();
// 1. 计算 key 的 hash 值
int hash = hash(key);
// 2. 根据 hash 值找到 Segment 数组中的位置 j
// hash 是 32 位,无符号右移 segmentShift(28) 位,剩下低 4 位,
// 然后和 segmentMask(15) 做一次与操作,也就是说 j 是 hash 值的最后 4 位,也就是槽的数组下标
int j = (hash >>> segmentShift) & segmentMask;
// 刚刚说了,初始化的时候初始化了 segment[0],但是其他位置还是 null,
// ensureSegment(j) 对 segment[j] 进行初始化
if ((s = (Segment<K,V>)UNSAFE.getObject(
segments, (j << SSHIFT) + SBASE)) == null) // in ensureSegment
s = ensureSegment(j);
// 3. 插入新值到 槽 s 中
return s.put(key, hash, value, false);
}
第一层皮很简单,根据 hash 值很快就能找到相应的 Segment,之后就是 Segment 内部的 put 操作了。
Segment 内部是由 数组+链表 组成的:
final V put(K key, int hash, V value, boolean onlyIfAbsent) {
// 在往该 segment 写入前,需要先获取该 segment 的独占锁
// 先看主流程,后面还会具体介绍这部分内容
HashEntry<K,V> node = tryLock() ? null : scanAndLockForPut(key, hash, value);
V oldValue;
try {
HashEntry<K,V>[] tab = table; // 这个是 segment 内部的数组
int index = (tab.length - 1) & hash; // 再利用 hash 值,求应该放置的数组下标
HashEntry<K,V> first = entryAt(tab, index); // first 是数组该位置处的链表的表头
// 下面这串 for 循环虽然很长,不过也很好理解,想想该位置没有任何元素和已经存在一个链表这两种情况
for (HashEntry<K,V> e = first;;) {
if (e != null) {
K k;
if ((k = e.key) == key || (e.hash == hash && key.equals(k))) {
oldValue = e.value;
if (!onlyIfAbsent) {
e.value = value; // 覆盖旧值
++modCount;
}
break;
}
e = e.next; // 继续顺着链表走
}
else {
// node 到底是不是 null,这个要看获取锁的过程,不过和这里都没有关系。
// 如果不为 null,那就直接将它设置为链表表头;如果是null,初始化并设置为链表表头。
if (node != null)
node.setNext(first);
else
node = new HashEntry<K,V>(hash, key, value, first);
int c = count + 1;
// 如果超过了该 segment 的阈值,这个 segment 需要扩容
if (c > threshold && tab.length < MAXIMUM_CAPACITY)
rehash(node); // 扩容后面也会具体分析
else
// 没有达到阈值,将node放到数组tab的index位置,其实就是将新的节点设置成原链表的表头
setEntryAt(tab, index, node);
++modCount;
count = c;
oldValue = null;
break;
}
}
} finally {
unlock();
}
return oldValue;
}
同样的,put方法首先也会通过hash算法定位到对应的Segment,此时,如果获取到的Segment为空,则调用ensureSegment()方法;否则,直接调用查询到的Segment的put方法插入值,注意此处并没有用getObjectVolatile()方法读,而是在ensureSegment()中再用volatile读操作,这样可以在查询segments不为空的时候避免使用volatile读,提高效率。在ensureSegment()方法中,首先使用getObjectVolatile()读取对应Segment,如果还是为空,则以segments[0]为原型创建一个Segment对象,并将这个对象设置为对应的Segment值并返回。
private Segment<K,V> ensureSegment(int k) {
final Segment<K,V>[] ss = this.segments;
long u = (k << SSHIFT) + SBASE; // raw offset
Segment<K,V> seg;
if ((seg = (Segment<K,V>)UNSAFE.getObjectVolatile(ss, u)) == null) {
// 这里看到为什么之前要初始化 segment[0] 了,使用当前 segment[0] 处的数组长度和负载因子
// 来初始化 segment[k]为什么要用“当前”,因为 segment[0] 可能早就扩容过了
Segment<K,V> proto = ss[0];
int cap = proto.table.length;
float lf = proto.loadFactor;
int threshold = (int)(cap * lf);
// 初始化 segment[k] 内部的数组
HashEntry<K,V>[] tab = (HashEntry<K,V>[])new HashEntry[cap];
// 再次检查一遍该槽是否被其他线程初始化了。
if ((seg = (Segment<K,V>)UNSAFE.getObjectVolatile(ss, u)) == null) {
Segment<K,V> s = new Segment<K,V>(lf, threshold, tab);
// 使用 while 循环,内部用 CAS,当前线程成功设值或其他线程成功设值后,退出
while ((seg = (Segment<K,V>)UNSAFE.getObjectVolatile(ss, u)) == null) {
if (UNSAFE.compareAndSwapObject(ss, u, null, seg = s))
break;
}
}
}
return seg;
}
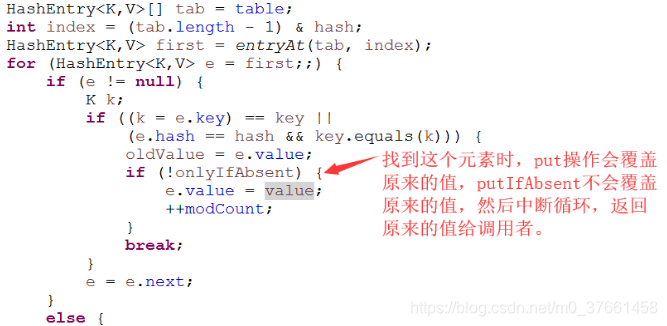
在Segment的put方法中,首先需要调用tryLock()方法获取锁,然后通过hash算法定位到对应的HashEntry,然后遍历整个链表,如果查到key值,则直接插入元素即可;而如果没有查询到对应的key,则需要调用rehash()方法对Segment中保存的table进行扩容,扩容为原来的2倍,并在扩容之后插入对应的元素。插入一个key/value对后,需要将统计Segment中元素个数的count属性加1。最后,插入成功之后,需要使用unLock()释放锁。
对Segment 加锁:

定位所在的table元素,并扫描table下的链表,找到时:
没有找到时:
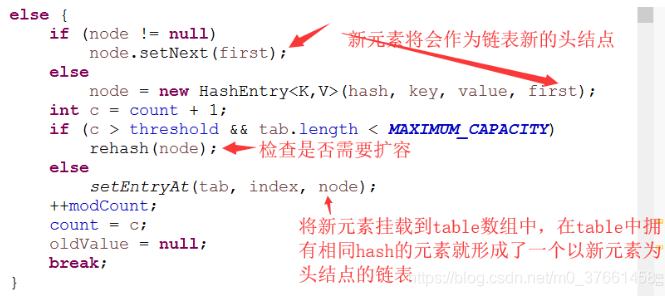
4.3扩容操作
Segment 不扩容,扩容下面的table数组,每次都是将数组翻倍

带来的好处:假设原来table长度为4,那么元素在table中的分布是这样的:
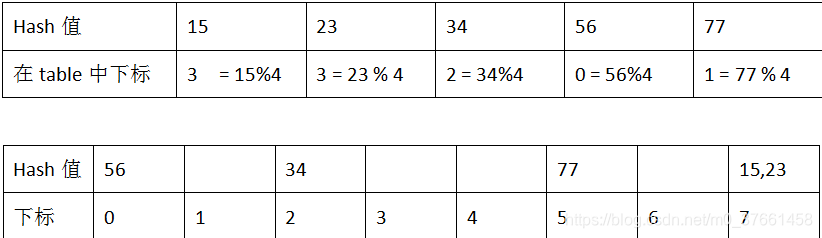
扩容后table长度变为8,那么元素在table中的分布变成:
可以看见 hash值为34和56的下标保持不变,而15,23,77的下标都是在原来下标的基础上+4即可,可以快速定位和减少重排次数。
4.4 size方法:
ConcurrentHashMap的size操作的实现方法也非常巧妙,一开始并不对Segment加锁,而是直接尝试将所有的Segment元素中的count相加,这样执行两次,然后将两次的结果对比,如果两次结果相等则直接返回;而如果两次结果不同,则再将所有Segment加锁,然后再执行统计得到对应的size值
弱一致性:
get方法和containsKey方法都是通过对链表遍历判断是否存在key相同的节点以及获得该节点的value。但由于遍历过程中其他线程可能对链表结构做了调整,因此get和containsKey返回的可能是过时的数据,这一点是ConcurrentHashMap在弱一致性上的体现。
四、JDK1.8中原理和实现
在JDK1.7之前,ConcurrentHashMap是通过分段锁机制来实现的,所以其最大并发度受Segment的个数限制。因此,在JDK1.8中,ConcurrentHashMap的实现原理摒弃了这种设计,而是选择了与HashMap类似的数组+链表+红黑树的方式实现,而加锁则采用CAS和synchronized实现。
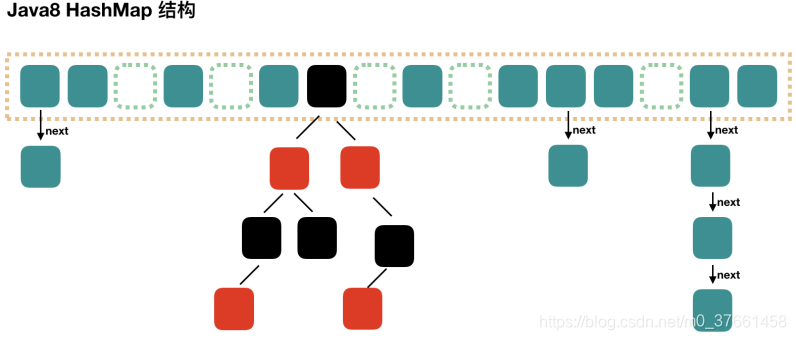
1、ConcurrentHashMap的数据结构
JDK1.8的ConcurrentHashMap数据结构比JDK1.7之前的要简单的多,其使用的是HashMap一样的数据结构:数组+链表+红黑树。ConcurrentHashMap中包含一个table数组,其类型是一个Node数组;而Node是一个继承自Map.Entry<K, V>的链表,而当这个链表结构中的数据大于8,则将数据结构升级为TreeBin类型的红黑树结构。
另外,JDK1.8中的ConcurrentHashMap中还包含一个重要属性sizeCtl,其是一个控制标识符,不同的值代表不同的意思:其为0时,表示hash表还未初始化,而为正数时这个数值表示初始化或下一次扩容的大小,相当于一个阈值;即如果hash表的实际大小>=sizeCtl,则进行扩容,默认情况下其是当前ConcurrentHashMap容量的0.75倍;而如果sizeCtl为-1,表示正在进行初始化操作;而为-N时,则表示有N-1个线程正在进行扩容。
JDK1.8的ConcurrentHashMap的初始化过程也比较简单,所有的构造方法最终都会调用如下这个构造方法。
public ConcurrentHashMap(int initialCapacity,float loadFactor, int concurrencyLevel) {
if (!(loadFactor > 0.0f) || initialCapacity < 0 || concurrencyLevel <= 0)
throw new IllegalArgumentException();
if (initialCapacity < concurrencyLevel) // Use at least as many bins
initialCapacity = concurrencyLevel; // as estimated threads
long size = (long)(1.0 + (long)initialCapacity / loadFactor);
int cap = (size >= (long)MAXIMUM_CAPACITY) ? MAXIMUM_CAPACITY : tableSizeFor((int)size);
this.sizeCtl = cap;
}
该初始化过程通过指定的初始容量initialCapacity,加载因子loadFactor和预估并发度concurrencyLevel三个参数计算table数组的初始大小sizeCtl的值。
可以看到,在构造ConcurrentHashMap时,并不会对hash表(Node<K, V>[] table)进行初始化,hash表的初始化是在插入第一个元素时进行的。在put操作时,如果检测到table为空或其长度为0时,则会调用initTable()方法对table进行初始化操作。
private final Node<K,V>[] initTable() {
Node<K,V>[] tab; int sc;
while ((tab = table) == null || tab.length == 0) {
if ((sc = sizeCtl) < 0)
Thread.yield(); // lost initialization race; just spin
else if (U.compareAndSwapInt(this, SIZECTL, sc, -1)) {
try {
if ((tab = table) == null || tab.length == 0) {
int n = (sc > 0) ? sc : DEFAULT_CAPACITY;
@SuppressWarnings("unchecked")
Node<K,V>[] nt = (Node<K,V>[])new Node<?,?>[n];
table = tab = nt;
sc = n - (n >>> 2);
}
} finally {
sizeCtl = sc;
}
break;
}
}
return tab;
}
可以看到,该方法使用一个循环实现table的初始化;在循环中,首先会判断sizeCtl的值,如果其小于0,则说明其正在进行初始化或扩容操作,则不执行任何操作,调用yield()方法使当前线程返回等待状态;而如果sizeCtl大于等于0,则使用CAS操作比较sizeCtl的值是否是-1,如果是-1则进行初始化。初始化时,如果sizeCtl的值为0,则创建默认容量的table;否则创建大小为sizeCtl的table;然后重置sizeCtl的值为0.75n,即当前table容量的0.75倍,并返回创建的table,此时初始化hash表完成。
3、Node链表和红黑树结构转换
上文中说到,一个table元素会根据其包含的Node节点数在链表和红黑树两种结构之间切换,因此我们本节先介绍Node节点的结构转换的实现。
首先,在table中添加一个元素时,如果添加元素的链表节点个数超过8,则会触发链表向红黑树结构转换。具体的实现方法如下:
/**
* Replaces all linked nodes in bin at given index unless table is
* too small, in which case resizes instead.
*/
private final void treeifyBin(Node<K,V>[] tab, int index) {
Node<K,V> b; int n, sc;
if (tab != null) {
if ((n = tab.length) < MIN_TREEIFY_CAPACITY)
tryPresize(n << 1);
else if ((b = tabAt(tab, index)) != null && b.hash >= 0) {
synchronized (b) {
if (tabAt(tab, index) == b) {
TreeNode<K,V> hd = null, tl = null;
for (Node<K,V> e = b; e != null; e = e.next) {
TreeNode<K,V> p =
new TreeNode<K,V>(e.hash, e.key, e.val,
null, null);
if ((p.prev = tl) == null)
hd = p;
else
tl.next = p;
tl = p;
}
setTabAt(tab, index, new TreeBin<K,V>(hd));
}
}
}
}
}
该方法首先会检查hash表的大小是否大于等于MIN_TREEIFY_CAPACITY,默认值为64,如果小于该值,则表示不需要转化为红黑树结构,直接将hash表扩容即可。
如果当前table的长度大于64,则使用CAS获取指定的Node节点,然后对该节点通过synchronized加锁,由于只对一个Node节点加锁,因此该操作并不影响其他Node节点的操作,因此极大的提高了ConcurrentHashMap的并发效率。加锁之后便是将这个Node节点所在的链表转换为TreeBin结构的红黑树。
然后,在table中删除元素时,如果元素所在的红黑树节点个数小于6,则会触发红黑树向链表结构转换。具体实现如下:
/**
* Returns a list on non-TreeNodes replacing those in given list.
*/
static <K,V> Node<K,V> untreeify(Node<K,V> b) {
Node<K,V> hd = null, tl = null;
for (Node<K,V> q = b; q != null; q = q.next) {
Node<K,V> p = new Node<K,V>(q.hash, q.key, q.val, null);
if (tl == null)
hd = p;
else
tl.next = p;
tl = p;
}
return hd;
}
4、ConcurrentHashMap的操作
4.1、get方法
通过get获取hash表中的值时,首先需要获取key值的hash值。而在JDK1.8的ConcurrentHashMap中通过spreed()方法获取。
static final int spread(int h) {
return (h ^ (h >>> 16)) & HASH_BITS;
}
speed()方法将key的hash值进行再hash,让hash值的高位也参与hash运算,从而减少哈希冲突。然后再查询对应的value值。
/**
* Returns the value to which the specified key is mapped,
* or {@code null} if this map contains no mapping for the key.
* /
public V get(Object key) {
Node<K,V>[] tab; Node<K,V> e, p; int n, eh; K ek;
int h = spread(key.hashCode());
if ((tab = table) != null && (n = tab.length) > 0 &&
(e = tabAt(tab, (n - 1) & h)) != null) {
if ((eh = e.hash) == h) {
if ((ek = e.key) == key || (ek != null && key.equals(ek)))
return e.val;
}
else if (eh < 0)
return (p = e.find(h, key)) != null ? p.val : null;
while ((e = e.next) != null) {
if (e.hash == h &&
((ek = e.key) == key || (ek != null && key.equals(ek))))
return e.val;
}
}
return null;
}
查询时,首先通过tabAt()方法找到key对应的Node链表或红黑树,然后遍历该结构便可以获取key对应的value值。其中,tabAt()方法主要通过Unsafe类的getObjectVolatile()方法获取value值,通过volatile读获取value值,可以保证value值的可见性,从而保证其是当前最新的值。
4.2、put方法
JDK1.8的ConcurrentHashMap的put操作实现主要定义在putVal(K key, V value, boolean onlyIfAbsent)中。
public V put(K key, V value) {
return putVal(key, value, false);
}
/** Implementation for put and putIfAbsent */
final V putVal(K key, V value, boolean onlyIfAbsent) {
if (key == null || value == null) throw new NullPointerException();
int hash = spread(key.hashCode());
int binCount = 0;
for (Node<K,V>[] tab = table;;) {
Node<K,V> f; int n, i, fh;
if (tab == null || (n = tab.length) == 0)
tab = initTable();
else if ((f = tabAt(tab, i = (n - 1) & hash)) == null) {
if (casTabAt(tab, i, null,
new Node<K,V>(hash, key, value, null)))
break; // no lock when adding to empty bin
}
else if ((fh = f.hash) == MOVED)
tab = helpTransfer(tab, f);
else {
V oldVal = null;
synchronized (f) {
if (tabAt(tab, i) == f) {
if (fh >= 0) {
binCount = 1;
for (Node<K,V> e = f;; ++binCount) {
K ek;
if (e.hash == hash &&
((ek = e.key) == key ||
(ek != null && key.equals(ek)))) {
oldVal = e.val;
if (!onlyIfAbsent)
e.val = value;
break;
}
Node<K,V> pred = e;
if ((e = e.next) == null) {
pred.next = new Node<K,V>(hash, key,
value, null);
break;
}
}
}
else if (f instanceof TreeBin) {
Node<K,V> p;
binCount = 2;
if ((p = ((TreeBin<K,V>)f).putTreeVal(hash, key,
value)) != null) {
oldVal = p.val;
if (!onlyIfAbsent)
p.val = value;
}
}
}
}
if (binCount != 0) {
if (binCount >= TREEIFY_THRESHOLD)
treeifyBin(tab, i);
if (oldVal != null)
return oldVal;
break;
}
}
}
addCount(1L, binCount);
return null;
}
put操作大致可分为以下几个步骤:
计算key的hash值,即调用speed()方法计算hash值;获取hash值对应的Node节点位置,此时通过一个循环实现。有以下几种情况:
- 如果table表为空,则首先进行初始化操作,初始化之后再次进入循环获取Node节点的位置。
- 如果table不为空,但没有找到key对应的Node节点,则直接调用casTabAt()方法插入一个新节点,此时不用加锁。
- 如果table不为空,且key对应的Node节点也不为空,但Node头结点的hash值为MOVED(-1),则表示需要扩容,此时调用helpTransfer()方法进行扩容。
- 其他情况下,则直接向Node中插入一个新Node节点,此时需要对这个Node链表或红黑树通过synchronized加锁。
- 插入元素后,判断对应的Node结构是否需要改变结构,如果需要则调用treeifyBin()方法将Node链表升级为红黑树结构;
- 最后,调用addCount()方法记录table中元素的数量。
4.3、size方法
JDK1.8的ConcurrentHashMap中保存元素的个数的记录方法也有不同,首先在添加和删除元素时,会通过CAS操作更新ConcurrentHashMap的baseCount属性值来统计元素个数。但是CAS操作可能会失败,因此,ConcurrentHashMap又定义了一个CounterCell数组来记录CAS操作失败时的元素个数。因此,ConcurrentHashMap中元素的个数则通过如下方式获得:
元素总数 = baseCount + sum(CounterCell)
final long sumCount() {
CounterCell[] as = counterCells; CounterCell a;
long sum = baseCount;
if (as != null) {
for (int i = 0; i < as.length; ++i) {
if ((a = as[i]) != null)
sum += a.value;
}
}
return sum;
}
而JDK1.8中提供了两种方法获取ConcurrentHashMap中的元素个数:
public long mappingCount() {
long n = sumCount();
return (n < 0L) ? 0L : n; // ignore transient negative values
}
public final int size() {
return map.size();
}
如代码所示,size只能获取int范围内的ConcurrentHashMap元素个数;而如果hash表中的数据过多,超过了int类型的最大值,则推荐使用mappingCount()方法获取其元素个数。
5、JDK1.8实现与1.7相比的重大变化
- 取消了segment数组,直接用table保存数据,锁的粒度更小,减少并发冲突的概率。
- 存储数据时采用了链表+红黑树的形式,纯链表的形式时间复杂度为O(n),红黑树则为O(logn),性能提升很大。什么时候链表转红黑树?当key值相等的元素形成的链表中元素个数超过8个的时候。
- 主要数据结构和关键变量:Node类存放实际的key和value值。
- sizeCtl: ·负数:表示进行初始化或者扩容,-1表示正在初始化,-N,表示有N-1个线程正在进行扩容 ·正数:0 表示还没有被初始化,>0的数,初始化或者是下一次进行扩容的阈值
- TreeNode 用在红黑树,表示树的节点, TreeBin是实际放在table数组中的,代表了这个红黑树的根。
- 扩容操作
- transfer()方法进行实际的扩容操作,table大小也是翻倍的形式,有一个并发扩容的机制。
- size方法:估计的大概数量,不是精确数量
- 一致性:弱一致