今天刚发布完小觅双目摄像头深度版系列新成员——Mobile版,第二个好消息就马不停蹄得来了!——小觅双目摄像头深度版(MYNT EYE D)固件全新升级啦!
升级后,小觅双目摄像头深度版的点云效果和室外深度图效果都得到了极大优化。

升级效果详情:
固件升级后的小觅双目摄像头深度版,室外实测时的深度图十分精准平滑。主要是因为,这次D版双目的最新固件平衡了距离和深度图质量,加强了深度置信度,降低了误匹配的点的数量。

固件升级后的D版双目室外深度图实测效果
此外,此次升级还大幅优化了点云效果,调整了深度可测距离。加强去除飞点的强度,能有效减少flying pixel noise,侧面看地面的点云跳动幅度减少了一倍以上。
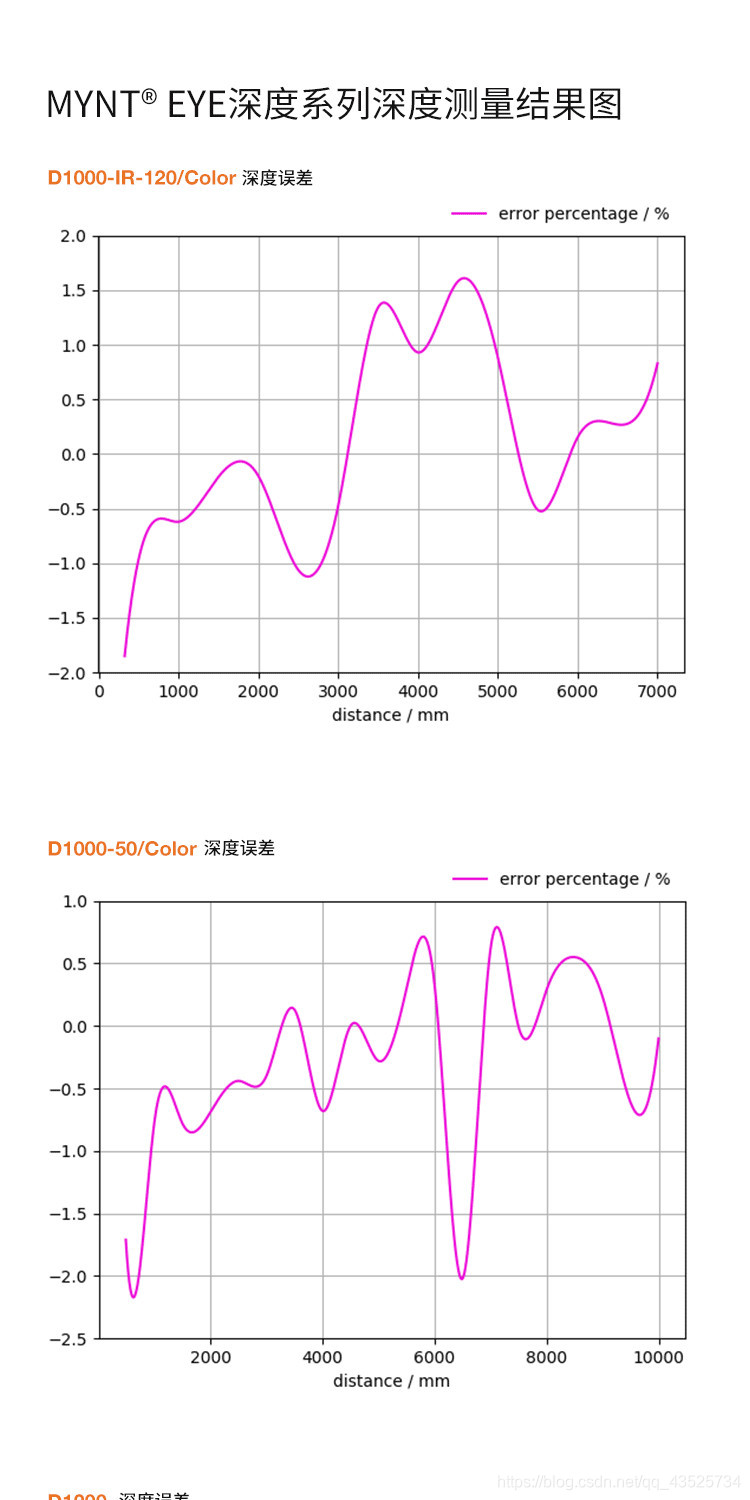
此次固件升级后,小觅双目摄像头深度版120度视角版在7m内深度测距误差2%以内。小觅双目摄像头深度版50度视角版在10m内深度测距误差在2.5%以内。此次升级可能会对使用距离有一定影响,具体变化详情可参见最新spec参数表。
更新方式:
固件已上传至百度网盘:https://pan.baidu.com/s/1sZKxugg5P8Dk5QgneA9ttw#list/path=%2F
下载最新固件,安装eSPWriter工具,即可升级。
参考指南:https://mynt-eye-d-sdk.readthedocs.io/zh_CN/latest/tools/update_camera_firmware.html
好消息继续
小觅双目摄像头标准系列(MYNT EYE S)最新SDK2.3.5版也已更新完毕。
更新详情如下:
SDK2.3.5:
1、完善camera info信息
2、增加ROS同时打开多设备样例
3、增加S210A IIC地址设置API
4、增加图像/imu数据外部时间源标志位
5、提供适配S1030的LaserScan样例
6、修改ros点云默认朝向
小觅双目摄像头标准彩色版相机固件1.2版更新:
1、修复imu量程设置偶现失效问题
2、增加S210A IIC地址设置API
3、增加图像/imu数据外部时间源标志位
4、提高IIC通信速度
5、修改部分IIC通信协议与逻辑
小觅双目摄像头标准彩色版辅助芯片1.3 更新:
1、增加图像/imu数据外部时间源标志位
2、提高IIC通信速度
3、修改部分IIC通信协议与逻辑更新方式:
SDK更新已上传至GitHub,有需求的用户可前往下载。
SDK下载地址:https://mynt-eye-s-sdk-docs-zh-cn.readthedocs.io/zh_CN/latest/